矩阵是什么?
线性变换
- 定义:是一个从向量空间(V)到自身或另一个向量空间(W)的映射(T)
- 解释:Va 空间中的点(xa, ya)转换到 Vb 空间中, 结果是(xb, yb),过程就叫
线性变换
- 所用的转换工具——矩阵
ABCMND001
转换过程是:
[xaya1]ABCMND001
=[Axa+Bya+CMxa+Nya+D1]
=[xbyb1]
为什么是矩阵
- 统一表示多种变换
- 多种变换整合:通过矩阵运算规则,可将多个变换矩阵组合成一个复合矩阵,一次性完成多种变换(如:平移+缩放)
- 便于操作与管理:使用矩阵表示变换,使不同类型变换在形式上统一,便于在程序中进行管理和操作
- 易于实现复合变换
- 矩阵乘法特性:如要对图形依次进行旋转 R、缩放S 和平移 T,可先将这些变换表示为矩阵 R、S、T,通过计算复合矩阵 M=T×S×R (注意顺序),然后用矩阵 M 作用于图形的顶点坐标,就能一步完成所有变换
向量与矩阵,矩阵与矩阵的乘法
S=300030001T=102012001
MST=302032001MTS=306036001
∴MST=MTS
平移、缩放、旋转(三维空间)
平移矩阵
T=100001000010txtytz1
变换计算过程为(变换矩阵左乘向量):
100001000010txtytz1xyz1=x+txy+tyz+tz1
缩放矩阵
S=sx0000sy0000sz00001
变换计算过程为:
S=sx0000sy0000sz00001xyz1=sxxsyyszz1
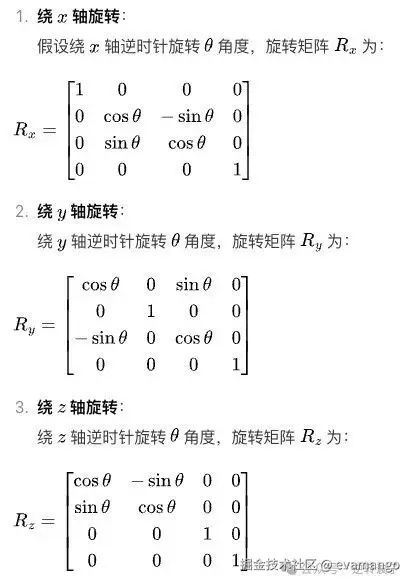
旋转(欧拉角)矩阵
单位矩阵、逆矩阵
单位矩阵
- 是一个方阵,即行数和列数相等。对于n 阶单位矩阵,记为In ,其主对角线(从左上角到右下角的对角线)上的元素都为1,其余元素均为0。如:
- 性质:
- 乘法特性:单位矩阵在矩阵乘法中类似于实数乘法中的数字。
- 可逆性:单位矩阵是可逆矩阵,且其逆矩阵就是它本身
逆矩阵


