

四叉树的构建与空间分割应用
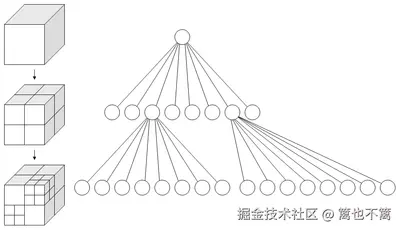
四叉树(Quadtree)是一种常用的数据结构,主要用于空间分割问题。四叉树通过递归地将二维空间划分为四个象限来存储数据,通常应用于图形学、地理信息系统(GIS)、图像压缩和碰撞检测等领域。
本文将详细介绍四叉树的构建原理及其在空间分割中的应用,并提供详细的 Python 代码示例,帮助读者更好地理解四叉树的实现。
什么是四叉树?
四叉树是一种树状数据结构,用于将二维空间递归划分为四个子区域,称为象限。每个节点代表一个矩形区域,节点可以有四个子节点,分别对应空间的四个象限:
- 左上象限(North-West, NW)
- 右上象限(North-East, NE)
- 左下象限(South-West, SW)
- 右下象限(South-East, SE)
四叉树最适用于存储稀疏数据,能有效减少不必要的存储和计算开销。
四叉树的基本概念
- 根节点:表示整个空间。
- 内部节点:非叶子节点,有四个子节点,分别代表空间的四个子区域。
- 叶子节点:没有子节点,存储具体数据。每个叶子节点只存储属于该区域的数据。
四叉树的构建
在构建四叉树时,需要指定空间的大小以及每个节点能存储的最大数据量。当节点中的数据超过这个限制时,节点会被进一步划分成四个子区域,数据会被重新分配到适当的子区域中。
四叉树的基本操作
- 插入数据点:将数据插入适当的象限。
- 查询数据点:查找某个区域内的数据点。
- 划分区域:当某个象限中的数据点数超过设定值时,该象限继续细分。
 Python 实现四叉树
Python 实现四叉树
下面是一个简单的 Python 实现,展示如何构建四叉树并进行空间分割。
class Point:
def __init__(self, x, y):
self.x = x
self.y = y
class Boundary:
def __init__(self, x, y, width, height):
self.x = x
self.y = y
self.width = width
self.height = height
def contains(self, point):
return (self.x - self.width <= point.x <= self.x + self.width and
self.y - self.height <= point.y <= self.y + self.height)
def intersects(self, range):
return not (range.x - range.width > self.x + self.width or
range.x + range.width < self.x - self.width or
range.y - range.height > self.y + self.height or
range.y + range.height < self.y - self.height)
class QuadTree:
def __init__(self, boundary, capacity):
self.boundary = boundary # 定义四叉树边界
self.capacity = capacity # 四叉树节点最大容量
self.points = [] # 当前节点中的数据点
self.divided = False # 是否已划分成四个子区域
def subdivide(self):
"""划分四个子区域"""
x = self.boundary.x
y = self.boundary.y
w = self.boundary.width / 2
h = self.boundary.height / 2
nw = Boundary(x - w, y - h, w, h)
ne = Boundary(x + w, y - h, w, h)
sw = Boundary(x - w, y + h, w, h)
se = Boundary(x + w, y + h, w, h)
self.northwest = QuadTree(nw, self.capacity)
self.northeast = QuadTree(ne, self.capacity)
self.southwest = QuadTree(sw, self.capacity)
self.southeast = QuadTree(se, self.capacity)
self.divided = True
def insert(self, point):
"""插入数据点"""
if not self.boundary.contains(point):
return False # 数据点不在当前节点范围内
if len(self.points) < self.capacity:
self.points.append(point) # 节点容量未满,直接添加
return True
else:
if not self.divided:
self.subdivide() # 划分成四个子节点
# 递归插入到子节点中
if self.northwest.insert(point):
return True
elif self.northeast.insert(point):
return True
elif self.southwest.insert(point):
return True
elif self.southeast.insert(point):
return True
def query(self, range, found):
"""查询某个范围内的所有点"""
if not self.boundary.intersects(range):
return # 不在查询范围内,返回空结果
for point in self.points:
if range.contains(point):
found.append(point)
if self.divided:
self.northwest.query(range, found)
self.northeast.query(range, found)
self.southwest.query(range, found)
self.southeast.query(range, found)
return found
# 示例:构建四叉树并插入数据点
boundary = Boundary(0, 0, 200, 200) # 定义空间边界
qt = QuadTree(boundary, 4) # 构建四叉树,节点容量设为4
# 插入数据点
points = [Point(50, 50), Point(-50, -50), Point(100, 100), Point(-100, -100)]
for p in points:
qt.insert(p)
# 查询某个范围内的数据点
query_range = Boundary(0, 0, 100, 100)
found_points = qt.query(query_range, [])
print(f"Found {len(found_points)} points in the query range.")
for p in found_points:
print(f"Point({p.x}, {p.y})")
代码说明
- Point 类:表示二维空间中的一个点,具有 x 和 y 坐标。
- Boundary 类:表示一个矩形区域(即节点的边界),包含
contains方法来判断某点是否在区域内。 - QuadTree 类:表示四叉树,提供插入和查询功能。插入时,如果节点容量满了,会自动划分子区域。查询时,通过递归遍历子节点,返回符合条件的所有点。
四叉树的空间分割应用
1. 碰撞检测
在游戏开发和物理仿真中,碰撞检测是一个常见问题。通过四叉树可以将二维空间划分为多个小区域,减少需要计算的对象数量,从而提高碰撞检测的效率。
2. 图像处理
在图像处理中,四叉树用于图像的分层表示,尤其是用于图像压缩。通过递归分割图像区域,可以高效地表示图像数据,并在图像处理操作中减少不必要的计算。
3. 地理信息系统(GIS)
在 GIS 中,四叉树可以用于高效存储和查询地理数据。例如,地图应用可以使用四叉树来管理兴趣点(POI)的查询,减少不必要的查询开销,提升系统响应速度。
4. 空间索引
四叉树常用于建立空间索引,特别是针对二维空间的大量数据进行快速查询。在地理信息系统(GIS)和计算机图形学等领域,空间索引的效率对系统性能至关重要。使用四叉树可以大幅减少不必要的遍历和搜索,从而加快数据访问速度。
例如,当我们处理大量地理位置数据(如 GPS 坐标)时,传统方法可能需要遍历所有数据点,但使用四叉树可以将这些数据点按照空间进行分割和管理,只需遍历感兴趣的区域,显著减少计算量。
空间索引示例
在实际应用中,空间索引系统会根据需求对空间划分的精度进行调整。以地图应用为例,四叉树可以帮助实现高效的地理数据查询。当用户放大地图时,可以快速检索显示区域内的所有兴趣点(POI),而不必遍历整个数据库。四叉树的查询复杂度通常为 (O(\log n)),相较于线性搜索的 (O(n)),能大幅提升查询性能。
在下面的示例中,我们扩展了四叉树的查询功能,使其能在一个范围内高效地检索到所有匹配的数据点。
class Point:
def __init__(self, x, y, data=None):
self.x = x
self.y = y
self.data = data # 存储与该点相关联的额外信息
class Boundary:
def __init__(self, x, y, width, height):
self.x = x
self.y = y
self.width = width
self.height = height
def contains(self, point):
return (self.x - self.width <= point.x <= self.x + self.width and
self.y - self.height <= point.y <= self.y + self.height)
def intersects(self, range):
return not (range.x - range.width > self.x + self.width or
range.x + range.width < self.x - self.width or
range.y - range.height > self.y + self.height or
range.y + range.height < self.y - self.height)
class QuadTree:
def __init__(self, boundary, capacity):
self.boundary = boundary
self.capacity = capacity
self.points = []
self.divided = False
def subdivide(self):
x = self.boundary.x
y = self.boundary.y
w = self.boundary.width / 2
h = self.boundary.height / 2
nw = Boundary(x - w, y - h, w, h)
ne = Boundary(x + w, y - h, w, h)
sw = Boundary(x - w, y + h, w, h)
se = Boundary(x + w, y + h, w, h)
self.northwest = QuadTree(nw, self.capacity)
self.northeast = QuadTree(ne, self.capacity)
self.southwest = QuadTree(sw, self.capacity)
self.southeast = QuadTree(se, self.capacity)
self.divided = True
def insert(self, point):
if not self.boundary.contains(point):
return False
if len(self.points) < self.capacity:
self.points.append(point)
return True
else:
if not self.divided:
self.subdivide()
if self.northwest.insert(point):
return True
elif self.northeast.insert(point):
return True
elif self.southwest.insert(point):
return True
elif self.southeast.insert(point):
return True
def query(self, range, found):
if not self.boundary.intersects(range):
return
for point in self.points:
if range.contains(point):
found.append(point)
if self.divided:
self.northwest.query(range, found)
self.northeast.query(range, found)
self.southwest.query(range, found)
self.southeast.query(range, found)
return found
# 创建一个空间边界和四叉树
boundary = Boundary(0, 0, 200, 200)
qt = QuadTree(boundary, 4)
# 插入一些点,包括相关数据
points = [Point(50, 50, "A"), Point(-50, -50, "B"), Point(100, 100, "C"), Point(-100, -100, "D")]
for p in points:
qt.insert(p)
# 查询某个范围内的点
query_range = Boundary(0, 0, 100, 100)
found_points = qt.query(query_range, [])
# 输出找到的点及其相关数据
print(f"Found {len(found_points)} points in the query range.")
for p in found_points:
print(f"Point({p.x}, {p.y}) with data: {p.data}")
代码说明
Point类:包含x和y坐标,以及一个可选的data字段,用于存储与该点相关的数据,如地理位置中的兴趣点信息。Boundary类:定义了二维空间中的一个矩形区域,提供了contains和intersects方法,用于判断某点是否在区域内或某区域是否与当前区域相交。QuadTree类:用于存储空间中的点,并支持插入和范围查询功能。
5. 动态物体的空间管理
在实时系统中,例如自驾车系统、动态物体检测等应用场景,四叉树可以被用作高效的空间分割和管理工具。动态物体(如车辆、行人)在场景中的移动需要实时的碰撞检测和路径规划。通过四叉树进行空间分割,我们可以在某一时刻快速找到物体所在的区域,从而减少不必要的计算量,保证系统的实时性。
实时动态物体检测
例如,在自动驾驶领域,车辆需要通过感知系统实时获取前方路况,判断是否有障碍物或其他车辆进入车辆的行驶路径。通过四叉树对感知区域进行分割,可以加速障碍物检测和路径规划。以下是一个使用四叉树管理动态物体的简化示例:
import random
class MovingObject:
def __init__(self, x, y, vx, vy):
self.x = x
self.y = y
self.vx = vx # x 方向速度
self.vy = vy # y 方向速度
def move(self):
"""根据速度更新位置"""
self.x += self.vx
self.y += self.vy
# 扩展四叉树用于管理动态物体
class DynamicQuadTree(QuadTree):
def __init__(self, boundary, capacity):
super().__init__(boundary, capacity)
def update(self, objects):
"""更新四叉树中的所有对象"""
self.points.clear()
for obj in objects:
obj.move() # 移动物体
point = Point(obj.x, obj.y)
self.insert(point)
# 示例:管理动态物体
boundary = Boundary(0, 0, 200, 200)
dynamic_qt = DynamicQuadTree(boundary, 4)
# 生成一些动态物体
objects = [MovingObject(random.randint(-100, 100), random.randint(-100, 100), random.uniform(-1, 1), random.uniform(-1, 1)) for _ in range(10)]
# 更新四叉树并查询区域内的物体
for _ in range(10): # 模拟 10 帧
dynamic_qt.update(objects)
query_range = Boundary(0, 0, 100, 100)
found_objects = dynamic_qt.query(query_range, [])
print(f"Found {len(found_objects)} objects in the query range.")
代码说明
MovingObject类:表示场景中的动态物体,包含其位置和速度,并通过move方法更新位置。DynamicQuadTree类:继承自QuadTree,扩展了更新功能,通过update方法可以实时更新物体的位置信息,并重新插入四叉树中。- 模拟场景:动态生成一些物体,并在每一帧中更新物体的位置,随后在某一范围内查询符合条件的物体。
6. 图像处理中的应用
四叉树在图像处理领域也有广泛的应用,尤其是对于需要进行区域分割、纹理分析或图像压缩的任务。例如,在图像压缩中,四叉树可以根据图像的不同区域进行自适应的分割,将复杂区域保留更高的分辨率,而简单区域则进行更高的压缩,从而达到平衡图像质量和存储效率的目的。
图像分割的示例
我们可以使用四叉树对图像进行分割,以实现自适应的压缩策略。具体来说,四叉树会递归地划分图像的每个部分,直到该部分的颜色变化符合某个阈值。对于颜色变化较小的部分,我们可以用一个颜色块来近似表示该区域,而对于颜色变化较大的部分,则需要进一步细化分割。
以下是一个简单的四叉树图像分割示例:
import numpy as np
import matplotlib.pyplot as plt
class ImageQuadTree:
def __init__(self, image, threshold):
self.image = image
self.threshold = threshold
self.height, self.width = image.shape
def get_region_mean(self, x, y, w, h):
"""计算区域的平均像素值"""
return np.mean(self.image[y:y+h, x:x+w])
def get_region_variance(self, x, y, w, h):
"""计算区域的像素值方差"""
return np.var(self.image[y:y+h, x:x+w])
def subdivide(self, x, y, w, h):
"""递归地细分图像区域"""
if w <= 1 or h <= 1:
return [(x, y, w, h)]
variance = self.get_region_variance(x, y, w, h)
if variance < self.threshold:
return [(x, y, w, h)]
half_w = w // 2
half_h = h // 2
regions = []
regions += self.subdivide(x, y, half_w, half_h) # 左上
regions += self.subdivide(x + half_w, y, half_w, half_h) # 右上
regions += self.subdivide(x, y + half_h, half_w, half_h) # 左下
regions += self.subdivide(x + half_w, y + half_h, half_w, half_h) # 右下
return regions
def segment(self):
"""对整幅图像进行四叉树分割"""
return self.subdivide(0, 0, self.width, self.height)
# 示例:加载灰度图像并进行四叉树分割
image = np.random.randint(0, 255, (256, 256)) # 随机生成一张灰度图
threshold = 100 # 定义颜色方差的阈值
qt = ImageQuadTree(image, threshold)
regions = qt.segment()
# 可视化结果
plt.imshow(image, cmap='gray')
for (x, y, w, h) in regions:
plt.gca().add_patch(plt.Rectangle((x, y), w, h, fill=False, edgecolor='red'))
plt.show()
代码说明
ImageQuadTree类:表示用于图像分割的四叉树。其主要方法包括get_region_mean和get_region_variance用于计算区域内像素的平均值和方差。subdivide方法:递归地将图像区域分割为四个子区域,直到区域的方差低于预定的阈值,表示该区域足够“均匀”,不需要进一步分割。- 图像分割过程:通过
segment方法对整幅图像进行分割,返回所有被划分的区域。
在这个例子中,四叉树根据每个区域的颜色变化(即方差)来判断是否需要继续细分。当图像某个区域的方差低于预设的阈值时,表示该区域的颜色分布较为均匀,可以不再进一步分割,这种分割方式有助于在图像处理和压缩中优化效率。
7. 其他常见应用场景
除了空间索引和图像处理外,四叉树还有许多其他实际应用。
7.1 碰撞检测
在游戏开发和物理仿真中,碰撞检测是一个需要高效解决的问题。随着游戏场景中物体数量的增加,直接对每一对物体进行碰撞检测的代价将非常昂贵。四叉树通过将场景按区域划分,并仅对位于同一区域内的物体进行碰撞检测,可以有效减少计算量。
7.2 N 体问题
N 体问题是指在天体物理学中计算多个物体(如星体)之间的引力作用。由于每个物体都与其他物体相互作用,因此该问题的计算复杂度通常是 (O(n^2))。利用四叉树,我们可以将远离目标的物体组合为一个整体进行计算,从而降低计算复杂度。
7.3 地理信息系统(GIS)
在 GIS 中,四叉树常用于存储和检索二维地理数据,如城市地图、地形数据等。通过将地图划分为多个不同的区域,系统可以快速找到特定区域的相关信息。四叉树的分割方式使其在面对大规模数据时仍能保持高效性能,尤其适用于范围查询和邻近查询。
8. 四叉树的局限性
尽管四叉树在空间分割中具有强大的能力,但它在某些场景下也存在局限性:
- 维度限制:四叉树仅适用于二维空间的分割,而对于更高维度(如三维、四维等)的问题,需要使用对应的 八叉树(用于三维)或其他高维数据结构。
- 均匀性假设:四叉树在进行空间分割时,通常假设数据在各个方向上是均匀分布的。然而,在一些数据分布不均匀的场景中,四叉树的效率会有所下降。
均匀分布问题
在实际应用中,当数据分布不均匀时,四叉树可能会不断地对某些区域进行深度细分,而对其他区域则保持较少的分割。这会导致四叉树的深度不平衡,影响其插入和查询效率。在这些情况下,可以结合 R 树 等其他空间数据结构来优化性能。
9. 总结
四叉树作为一种经典的空间分割数据结构,广泛应用于空间索引、图像处理、碰撞检测等领域。通过递归地将空间划分为四个子区域,四叉树可以在大规模数据集或复杂图像中进行高效的空间查询和区域处理。在图像处理、地理信息系统、物理仿真等实际场景中,四叉树不仅可以提高存储效率,还能显著优化查询和计算性能。
本文通过具体的构建步骤和 Python 代码示例展示了四叉树的基本实现及其在空间分割、图像处理等方面的应用。然而,四叉树也有其局限性,尤其在高维空间或数据分布不均的场景下,其性能可能受到影响。结合其他数据结构如八叉树、R 树等,可以进一步提高其适用性和效率。
总体而言,四叉树在二维空间中的表现尤为突出,并且在未来的空间分割、图像处理和大规模数据查询中依然扮演重要角色。
