On-Manifold Preintegration for Real-Time Visual-Inertial Odometry
讲预积分的资料很多,但是总有很多我觉得不顺畅和难以理解的地方,因此直接选择看原论文,获取第一手的资料是个不错的选择。
这篇论文的公式推导简直是蔚为大观,惊为天人,不敢想象工作量有多大,对状态估计的理解有多深。
因子图中的因子,即factor等同于residual。
这篇文章的前导部分太多了,因此直接从第V部分看起。
V. IMU Model and Motion Integration
IMU测量模型:
Bω~WB(t)Ba~(t)=BωWB(t)+bg(t)+ηg(t)=RWB⊤(t)(wa(t)−wg)+ba(t)+ηa(t),
IMU测得的量是角速度Bω~WB(t)和线加速度Ba~(t)。这两个测量值都包含了加性高斯白噪声ηg(t),ba(t)和缓慢变化传感器偏差bg(t),ba(t),这里的偏差服从随机游走分布。简单理解成每次测量都有偏差,但是偏差都会有些许不同,因此偏差也是待估计的量。除此之外,角速度是直接放置在IMU坐标系下的,但是线加速度真值需要先减去重力加速度,先放置在世界坐标系下,之后再用旋转矩阵变换到IMU坐标系下。
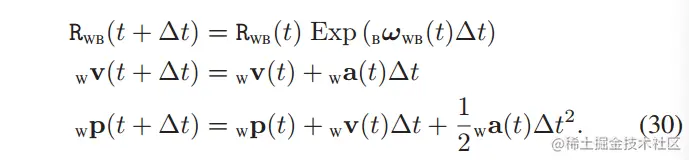
微小时间内积分获得旋转矩阵、线速度、平移量:
RWB(t+Δt)=RWB(t)Exp(∫tt+ΔtBωwB(τ)dτ)wv(t+Δt)=wv(t)+∫tt+Δtwa(τ)dτwp(t+Δt)=wp(t)+∫tt+Δtwv(τ)dτ+∬tt+Δtwa(τ)dτ2.
这里的Exp()是exp(⋅∧)的简写方式。公式(1)把角速度在时间上积分就能获得旋转向量,也就是李代数ϕ,之后再指数映射为旋转矩阵。公式(2)(3)容易理解,不要需要注意是在世界坐标系下的。
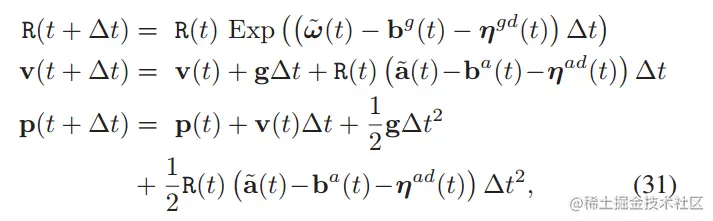
假设短时间内匀速运动,离散化积分公式:
代入IMU模型:
离散后的高斯分布协方差:
Cov(ηgd(t))=Δt1Cov(ηg(t))
VI. IMU Preintergeration on Manifold
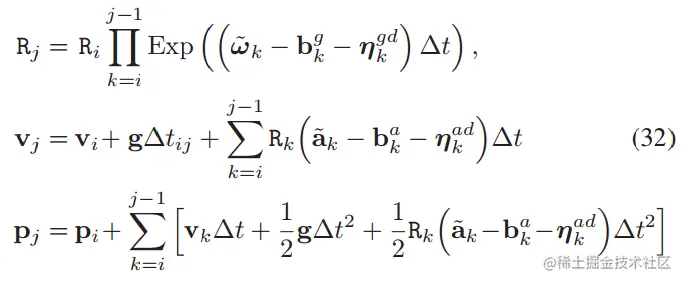
 对关键帧i和j之间的所有测量值进行积分获得j时的状态:
对关键帧i和j之间的所有测量值进行积分获得j时的状态:
直接积分的坏处/采用预积分的原因:
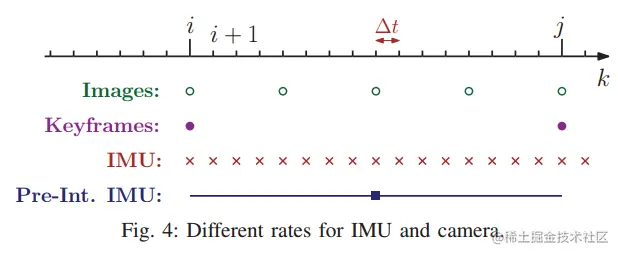
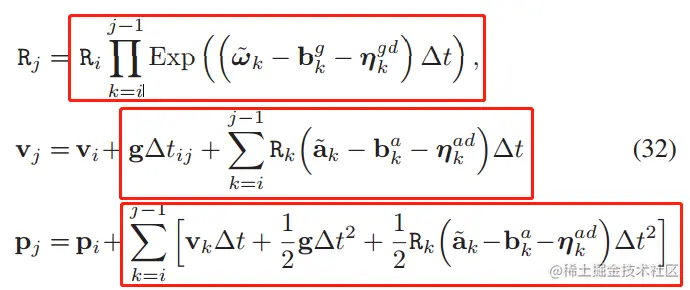 上述的公式中,为了方便,我们先不把偏差看成变量,而是已知常量,那么我们容易根据这三个公式构建出三种误差项,并且把上图中红色部分看成观测值。因为IMU的频率比较高,计算积分是很花时间的,因此这部分红色框中的"观测值",我们希望它是常量的,不用每次迭代优化都得重新计算一次,就像重投影误差中的特征点坐标一样。
上述的公式中,为了方便,我们先不把偏差看成变量,而是已知常量,那么我们容易根据这三个公式构建出三种误差项,并且把上图中红色部分看成观测值。因为IMU的频率比较高,计算积分是很花时间的,因此这部分红色框中的"观测值",我们希望它是常量的,不用每次迭代优化都得重新计算一次,就像重投影误差中的特征点坐标一样。
但是事与愿违,由于第23个公式中都包含了Rk,而Rk的计算方法与Rj相似,都是得最前面乘上一个Ri,那么一旦Ri在迭代优化中更新了,那么Rk也需要跟着更新,第23个公式中的积分就得重新再算。这一点原论文是这样阐述的:
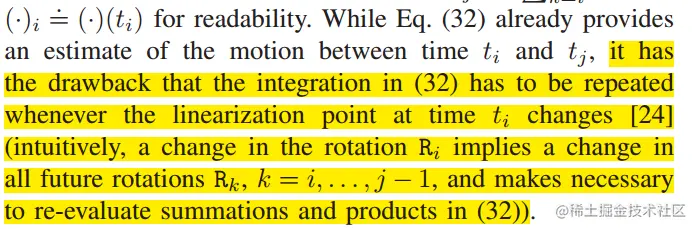
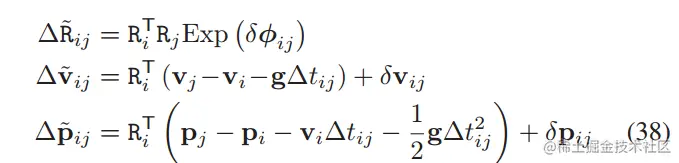
将积分项与Ri解耦,构建新的测量模型
因此最好是把积分中的Rk左乘上Ri的转置(就是逆),那么我们可以定义相对运动增量(relative motion increments),从而使得积分项脱离与Ri的耦合关系:
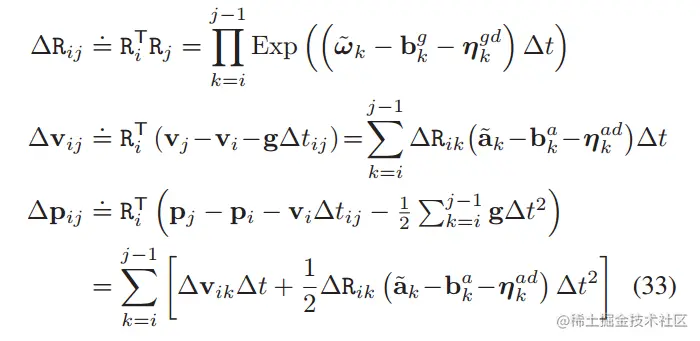 而这其中除了ΔRi,j有明确的物理含义,即i,j之间的相对旋转矩阵外,其它两项实际上并没有明显的物理含义,只是为了解耦Ri而拼凑出来的。
而这其中除了ΔRi,j有明确的物理含义,即i,j之间的相对旋转矩阵外,其它两项实际上并没有明显的物理含义,只是为了解耦Ri而拼凑出来的。
但是有一点很遗憾,上面我们假设了偏差b是常量,但是实际上它也是优化量,但是上面的过程并没有把它从积分项中解放出来。下面的VI-A我们仍然假设它是常量,VI-C中会对它的估计进行讨论,文章其他部分,我们则假设两关键帧之间偏差不变,即:
big=bi+1g=…=bj−1g,bia=bi+1a=…=bj−1a
A. Preintegrated IMU Measurements
前置公式:
Exp(ϕ+δϕ)≈Exp(ϕ)Exp(Jr(ϕ)δϕ)Exp(ϕ)R=RExp(R⊤ϕ)
由于上面的公式中的高斯噪声被封印在积分项中,这导致上面的公式很难被直接代入MAP中,因此我们希望能够把噪声从积分项中分离出来。
分离噪声
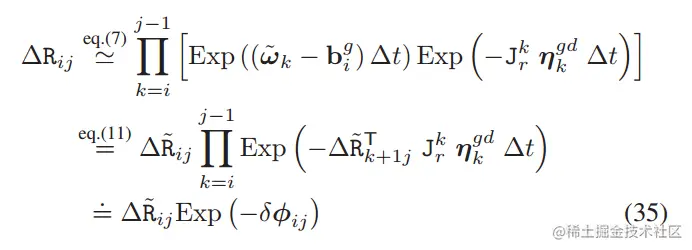 这公式在代入前置公式(2)时似乎存在顺序问题,但是暂且不管。其中,Jrk≐Jrk((ω~k−big)Δt),预积分旋转测量值ΔR~ij≐∏k=ij−1Exp((ω~k−big)Δt),对应的噪声为δϕi,j。
这公式在代入前置公式(2)时似乎存在顺序问题,但是暂且不管。其中,Jrk≐Jrk((ω~k−big)Δt),预积分旋转测量值ΔR~ij≐∏k=ij−1Exp((ω~k−big)Δt),对应的噪声为δϕi,j。
旋转矩阵若服从高斯分布,写法如下:
R~=RExp(ϵ),ϵ∼N(0,Σ)
虽然这里的噪声是指数映射之后再乘上去,但是如果用BCH公式进行进行的话,就可以拆分成李代数上的加法。从而与一般的观测公式统一起来,即观测值=f(优化变量)+观测噪声,对应到这里就是f(优化变量)=观测值−观测噪声。
速度也采用类似的方法对噪声进行分离:
 其中,Δv~ij≐∑k=ij−1ΔR~ik(a~k−bia)Δt,噪声为δvij,可以看到这个形式也是符合我们上面说的观测公式的形式。
其中,Δv~ij≐∑k=ij−1ΔR~ik(a~k−bia)Δt,噪声为δvij,可以看到这个形式也是符合我们上面说的观测公式的形式。
对于平移向量也是如此
构建观测公式形式
把优化变量带进去,调整一下形式,就变成真正的观测公式了。
B. Noise Propagation
A中虽然构建了观测公式,并且获得了三种噪声[δϕij⊤,δvij⊤,δpij⊤]⊤,这三种噪声服从的是均值为0的高斯分布,但是协方差我们并不知道。实际上,我们只知道最初观测时的高斯噪声的协方差,但是这里的噪声经过了层层计算,因此协方差需要重新推导。【这里涉及到《机器人的状态估计》中高斯分布的变换】
也是说我们希望知道下式中的Σi,j
ηijΔ≐[δϕij⊤,δvij⊤,δpij⊤]⊤∼N(09×1,Σij)
高斯噪声的协方差传播
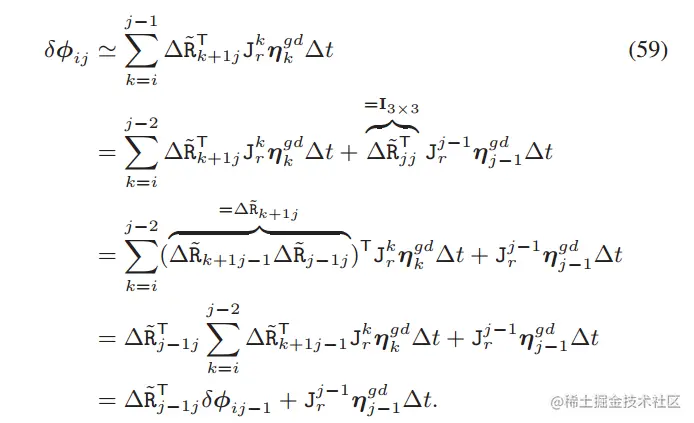
这是从前面的推导中以及知道旋转噪声的形式:
Exp(−δϕij)≐k=i∏j−1Exp(−ΔR~k+1j⊤JrkηkgdΔt)
两边取对数:
δϕij=−log(k=i∏j−1Exp(−ΔR~k+1j⊤JrkηkgdΔt))
注意这里取对数之后,并不能直接对数抵消指数,然后把李代数相加,而是需要用BCH公式进行进行,但是由于噪声实际上很小,所以近似时的雅克比近似于单位矩阵,因此最后才得到的是李代数相加,即:
δϕij≃k=i∑j−1ΔR~k+1j⊤JrkηkgdΔt
速度和平移量噪声的形式为:
δvij≃∑k=ij−1[−ΔR~ik(a~k−bia)∧δϕikΔt+ΔR~ikηkadΔt]δpij≃∑k=ij−1[δvikΔt−21ΔR~ik(a~k−bia)∧δϕikΔt2+21ΔR~ikηkadΔt2]
从上面的推导可以看出,三种噪声ηijΔ=[δϕij⊤,δvij⊤,δpij⊤]⊤都是原观测噪声ηkd≐[ηkgd,ηkad]的线性函数,既然是高斯分布的线性变换,那么传播后的协方差Σi,j就比较容易求解了。
为了实时运行,实际上,我们对Σi,j是采用不断迭代更新的方式进行计算的,即当一个新的IMU测量值到达时,就更新Σi,j。
下面我们先推导高斯噪声的迭代形式:(大概看看就行)
 把上面三个迭代公式写成紧凑的矩阵:
把上面三个迭代公式写成紧凑的矩阵:
ηijΔ=Aj−1ηij−1Δ+Bj−1ηj−1d
现在形式很明朗了,上述对高斯分布的迭代更新是线性的,因此很容易得到迭代后的协方差的计算公式:
Σij=Aj−1Σij−1Aj−1⊤+Bj−1ΣηBj−1⊤
迭代从Σii=09×9。
到这里可以阶段性总结一下预积分的步骤:
在i和j的时间段内,随着新的角速度和线加速度测量值不断送过来,我们可以累加更新三种观测值,同时更新对应的协方差,直到该时间段内的测量值都被包含进去,我们就获得了三个观测方程。
C. Incorporation Bias Updates
上述讨论中,偏差b={bia,big}被视为常量,但实际上它也是待估计的量。如果b进行更新,即b←b+δb,由于积分项中包含了b,那么就得重新进行积分了,很麻烦。因此最好是得到一种迭代更新形式,类似上面的协方差,那么我们可以进行一阶展开:
ΔR~ij(big)Δv~ij(big,bia)Δp~ij(big,bia)≃ΔR~ij(big)Exp(∂bg∂ΔRijδbg)≃Δv~ij(big,bia)+∂bg∂Δvijδbig+∂ba∂Δvijδbia≃Δp~ij(big,bia)+∂bg∂Δpijδbig+∂ba∂Δpijδbia
即,新的观测值=旧的观测值+旧的观测值对b的梯度*b的增量。
接下来需要对则其中五个雅克比的形式进行推导。以旋转矩阵为例(基本上是各种近似,大概看看就行):
新的观测值为:
ΔR~ij(b^i)=k=i∏j−1Exp((ω~k−b^ig)Δt)
把b←b+δb代进去,可以得到:
ΔR~ij(b^i)=k=i∏j−1Exp((ω~k−(big+δbig))Δt)≃k=i∏j−1Exp((ω~k−big)Δt)Exp(−JrkδbigΔt)
ΔR~ij(b^i)=ΔRijk=i∏j−1Exp(−ΔR~k+1j(bi)⊤JrkδbigΔt)
ΔR~ij(b^i)≃ΔRijExp(k=i∑j−1−ΔR~k+1j(bi)⊤JrkδbigΔt)=ΔRijExp(∂bg∂ΔRijδbig)
这样就求出了其中一个雅克比,其他的类似,最后有:
∂bg∂ΔRij∂ba∂Δvij∂bg∂Δbij∂ba∂Δbij∂bg∂Δpij=−k=i∑j−1[ΔR~k+1j(bi)⊤JrkΔt]=−k=1∑j−1ΔRikΔt=−k=i∑j−1ΔRik(a~k−bia)∧∂bg∂ΔRikΔt=k=i∑j−1∂ba∂ΔvikΔt−21ΔRikΔt2=k=i∑j−1∂bg∂ΔvikΔt−21ΔRik(a~k−bia)∧∂bg∂ΔRikΔt2
值得注意的是,这里的雅克比可以通过加上新的项进行更新。
D. Preintegraed IMU Factors
下面给出三种残差定义:
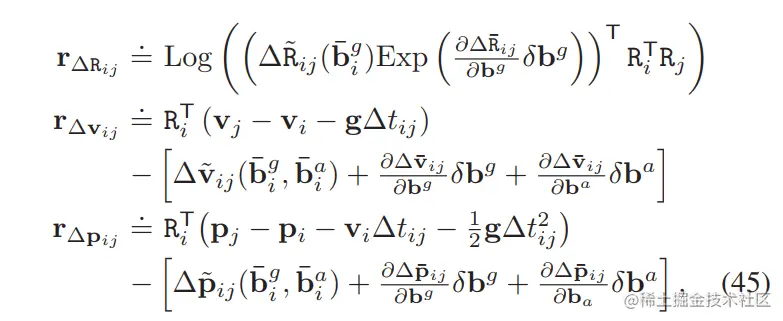 可以看出,其中的积分项是对偏差b的一阶展开,并且旋转残差最后转化为李代数,用李代数向量的模来衡量误差大小,也是常用的方法。
可以看出,其中的积分项是对偏差b的一阶展开,并且旋转残差最后转化为李代数,用李代数向量的模来衡量误差大小,也是常用的方法。
上面的误差共9维,而优化变量维度为15维,即
总结一下,论文首先给出了IMU的测量模型,其中的关键是线加速度的测量包含了旋转矩阵;然后对测量模型进行积分,给出了旋转矩阵、速度、平移的定义,并对积分进行离散化;由于积分项中包含了Ri,为了避免优化变量更新后需要重新积分,于是将Ri从中解耦,并初步整理形成观测模型公式;由于噪声包含了积分项中,不利于放入MAP,于是把噪声从中分离出来,于是观测模型公式完成;由于新的噪声是原始噪声的高斯变换,因此推导出新的噪声的协方差迭代更新公式;由于偏差也是优化变量,因此对观测量对偏差进行一阶展开,从而将偏差变量从中分离。
运行,从第i帧开始,每来一个新的观测值,都累加到三种观测值中,并对协方差矩阵进行更新。


