预备知识
什么是自然坐标系
在笛卡尔坐标系下,以x轴坐标和y轴坐标确定一个点,x轴与y轴的方向是一直固定不变的,下图的xy轴,y轴的单位方向向量为(0,1),x轴的方向向量为(1,0),即固定xy轴构成了确定一个坐标点位的参考系,而自然坐标系下的参考系不再是固定方向的,参考系是一条曲线,即下图红色曲线。
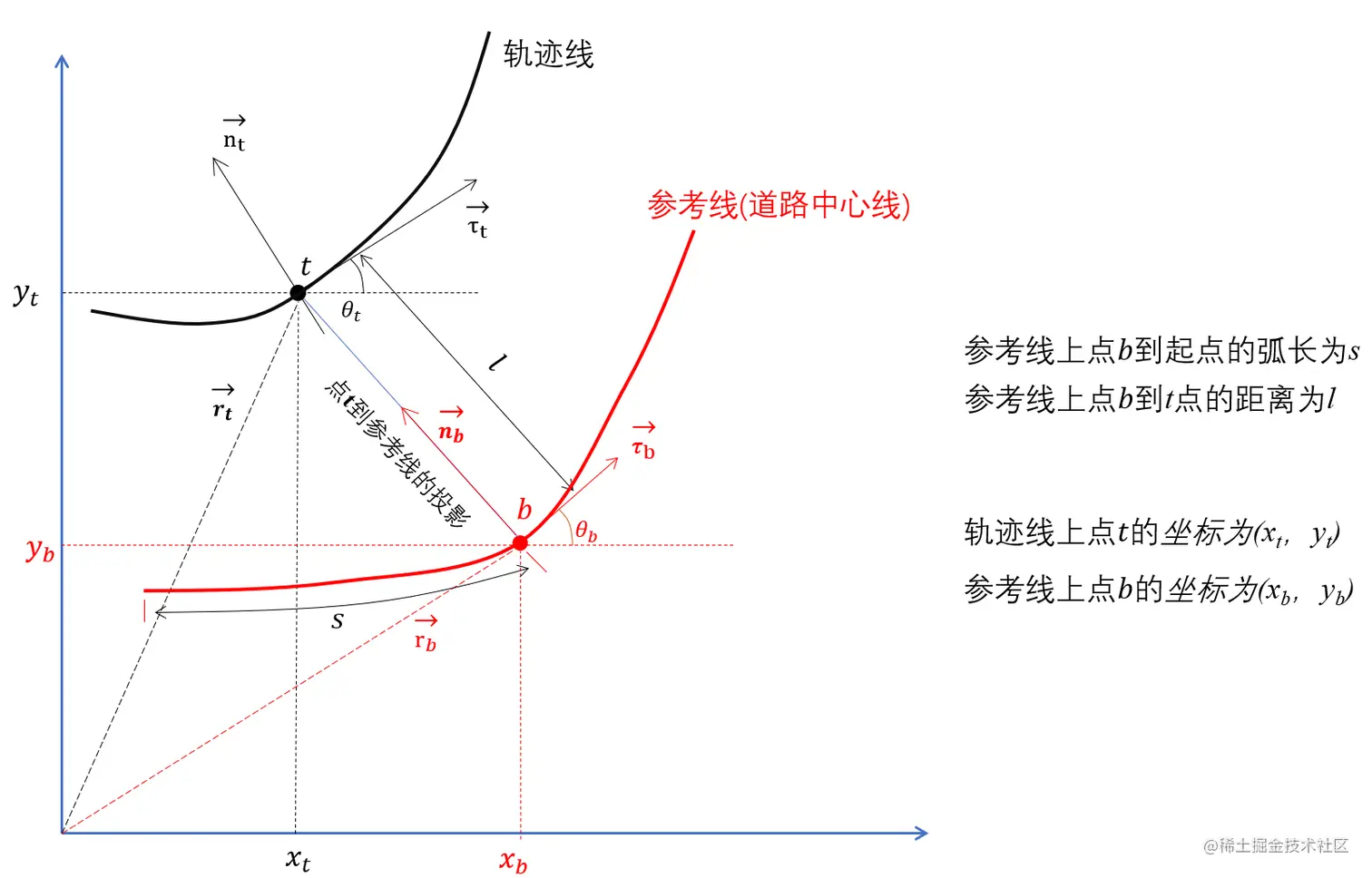
黑色曲线由车辆的轨迹点组成,现考虑某时刻的车辆轨迹点t,在笛卡尔坐标系下的坐标即为(xt,yt),但是以笛卡尔坐标系描述车辆位置,在路径规划时不便于进行计算,需要将其投影到自然坐标系,进行横纵向的解耦。
下图以道路中心线作为自然坐标系的参考线,我们如何计算t点的自然坐标呢,首先找到t点在参考线上的投影点b,投影点b到参考线起点的弧长为s,b点到t点的距离为l,那么我们就称以参考线为参考系的t点的自然坐标为(s,l)
这样看来自然坐标和笛卡尔坐标还是比较相似的,只不过自然坐标系下两个轴的方向向量不是固定不变的,需要我们通过计算投影来获得两个轴的方向向量。
本文要讲解的就是基于指定条件笛卡尔坐标和自然坐标(Frenet坐标)的相互转化,有数学推导,不需要了解推导过程的可以直接看转换公式。
二维Frenet公式
Frenet公式有三维的表达形式,但是在自动驾驶领域,局部的道路路面看作是二维平面,不太关注高度信息,所以这里直接考虑二维的情况。
笛卡尔坐标系下,考虑曲线上一点,其位矢r、单位法向量n、单位切向量τ如下:
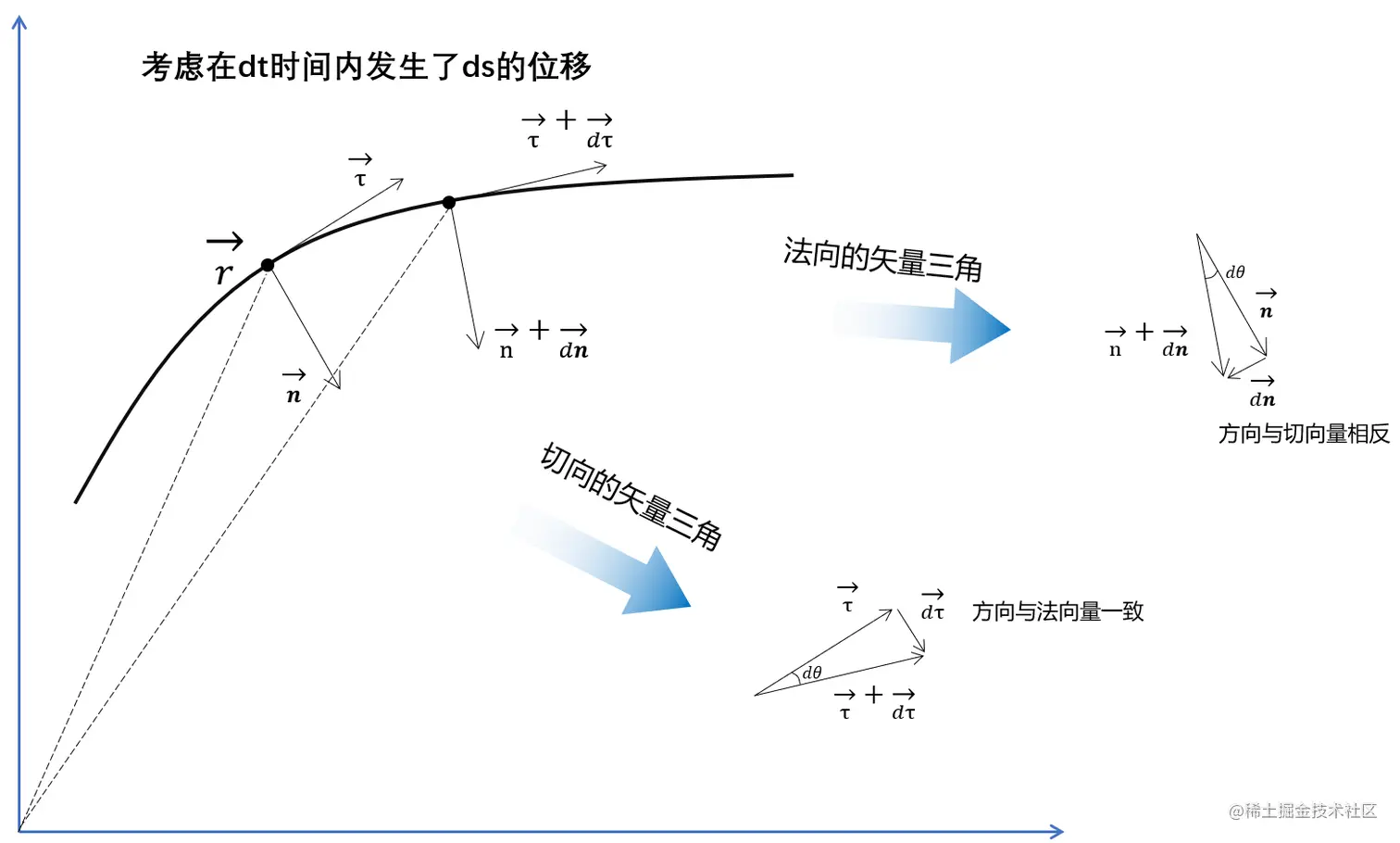
图1
1.求解切向量τ对弧长s的导数dsdτ:
考虑点移动了一个微小的位移,转过dθ,当dθ→0,dτ的方向趋近于τ的垂直方向,与n的方向一致,又τ+dτ,dτ都是单位向量,所以矢量三角是等腰三角形,有:
dτ=2∗1∗sin(2dθ)∗n
所以:
dsdτ=θ→0limds2∗sin(2dθ)∗n=ds2∗2dθ∗n=dsdθ∗n=k∗n
k为该点处的曲率。
2.求解法向量n对弧长s的导数dsdn:
考虑指点移动了一个微小的位移,转过dθ,当dθ→0,dn的方向趋近于n的垂直方向,与τ的方向相反,所以有:
dn=−2∗1∗sin(2dθ)∗τ
所以:
dsdn=θ→0limds−2∗sin(2dθ)∗τ=ds−2∗2dθ∗τ=−dsdθ∗τ=−k∗τ
这里得到两个重要公式:
dsdτ=k∗n(1)
dsdn=−k∗τ(2)
切向量和法向量对时间求导
链式转换一下:
dtdτ=dsdτdtds=k∗n∗∣v∣(3)
dtdn=dsdndtds=−k∗τ∗∣v∣(4)
曲线上点的速度和加速度公式(对时间求导)
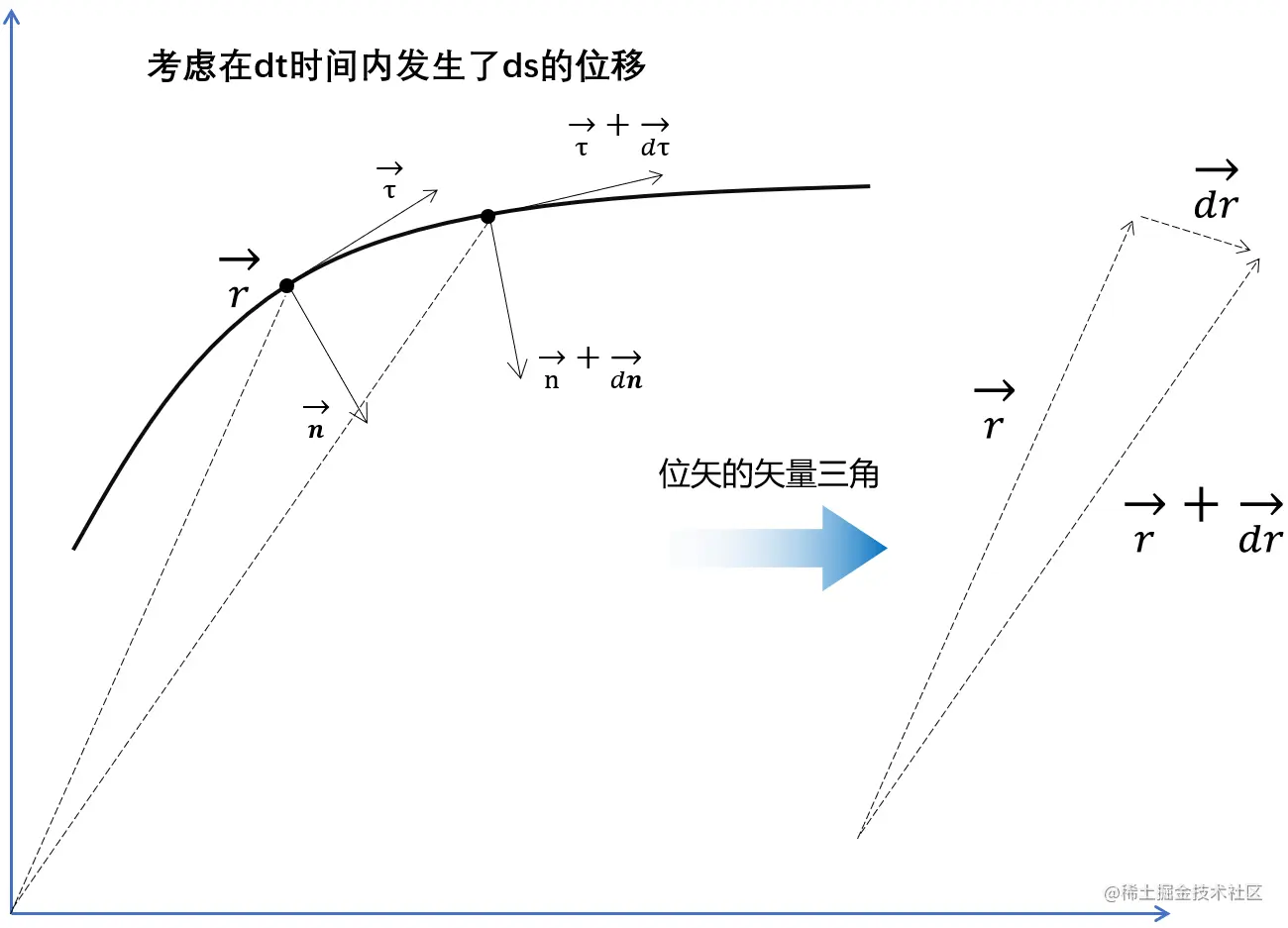
图2
在dr趋近于0时,dr的方向趋近于τ的方向,即切线方向,∣dr∣趋近于ds:
位矢对时间的一阶导数即速度v:
r˙=dtdr=dt∣dr∣∗τ=dtds∗τ=∣v∣∗τ
位矢对时间的二阶导数即加速度a:
这里用到了乘法求导法则,同时用到了公式1的结论:
r¨=dtdr˙=dtd(∣v∣∗τ)=dtd∣v∣∗τ+dtdτ∗∣v∣
那么dtdτ怎么求呢,要结合公式1的结论以及链式求导法则:
dtdτ=dsdτdtds=k∗n∗∣v∣
所以:
r¨=dtd∣v∣∗τ+k∗n∗∣v∣∗∣v∣=v˙∗τ+k∗n∗∣v∣2
可以看出曲线上的点的加速度由切向加速度和法向加速度组成。
这一步得到两个重要基础公式:
r˙=∣v∣∗τ(5)
r¨=v˙∗τ+k∗n∗∣v∣2(6)
预备知识总结
| 变量名称 | 含义 |
|---|
| r | 曲线上某点在笛卡尔坐标系下的位矢 |
| r˙ | 曲线上某点在笛卡尔坐标系下的速度向量(v),对时间的导数 |
| r¨ | 曲线上某点在笛卡尔坐标系下的加速度向量(a),对时间的导数 |
| τ | 曲线上某点在笛卡尔坐标系下的切向量(单位向量) |
| n | 曲线上某点在笛卡尔坐标系下的法向量(单位向量) |
| dsdτ | 曲线上某点的单位切向量对弧长的一阶导数 |
| dsdn | 曲线上某点的单位法向量对弧长的一阶导数 |
| τ˙ | 曲线上某点的单位切向量对时间的一阶导数 |
| n˙ | 曲线上某点的单位法向量对时间的一阶导数 |
| k | 曲线上某点的曲率 |
而对于6个基础公式:
公式(1)、(2)描绘的是曲线点切向量、法向量对曲线弧长的导数关系
公式(3)、(4)描绘的是曲线点切向量、法向量对时间的导数关系
公式(5)、(6)描绘的是曲线点的位矢对时间的一阶导、二阶导关系
现在考虑一下两条曲线,一条曲线是车辆的轨迹线,一条曲线是参考线(即Frenet坐标系下的参考线)
所谓使用参考线作为坐标轴的意思就是:对轨迹上任意一点t,找到该点到参考线的投影点b,既然是投影点那么t点必然在b点的法向量方向上,考虑参考线上点b到参考线的起始点弧长为s,t在b的法向量方向上的距离为l,那么我们就把坐标(s,l)称为以轨迹线为参考系的Frenet坐标。
为了方便推导笛卡尔坐标到Frenet坐标的转换公式,结合公式(1)、(2)、(3)、(4)、(5)、(6),可以得到以下基础公式:
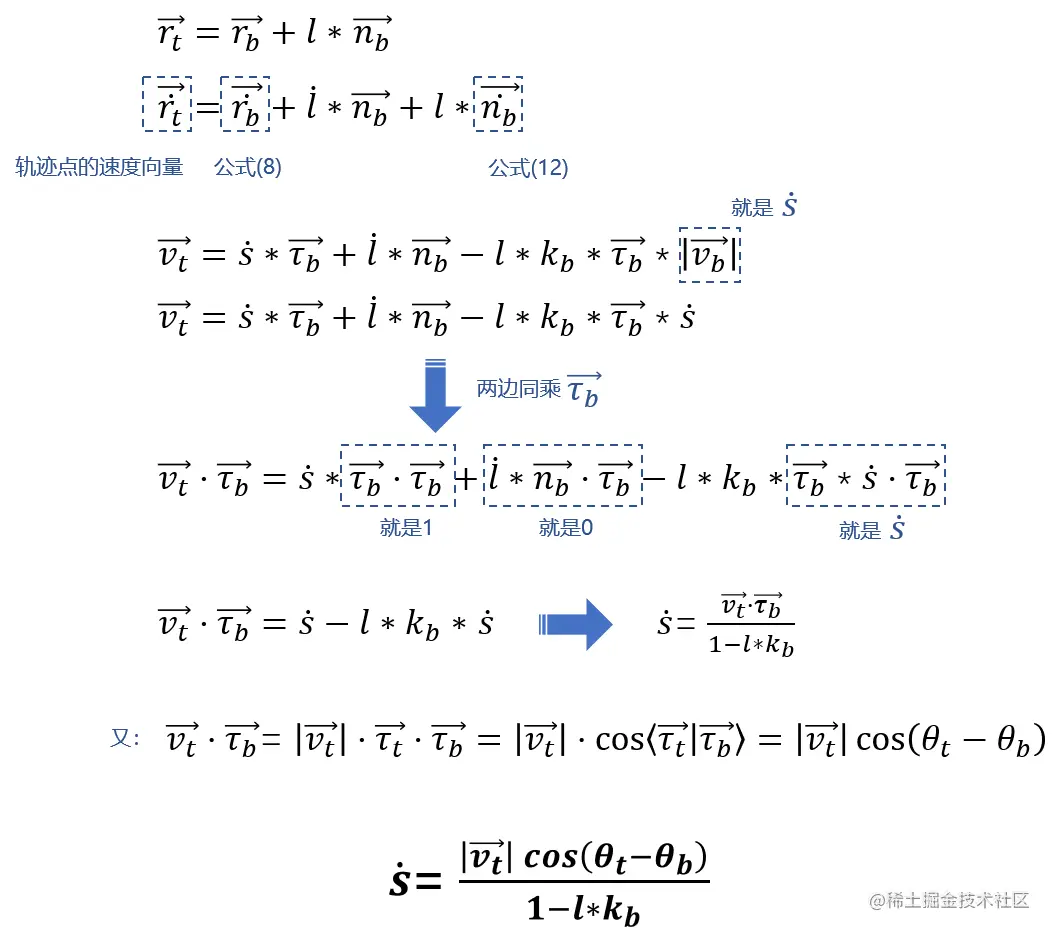
rt˙=∣vt∣∗τt(7)
rb˙=s˙∗τb(8)
τt˙=kt∗nt∗∣vt∣(9)
nt˙=−kt∗τt∗∣vt∣(10)
τb˙=kb∗nb∗∣vb∣(11)
nb˙=−kb∗τb∗∣vb∣(12)
rt¨=at=vt˙∗τt+k∗nt∗∣vt∣2(13)
公式(7)~(13)分别描绘了轨迹点位矢对时间的一阶导(公式7)、参考线投影点位矢对时间的一阶导(公式8)、轨迹点切向量对时间的一阶导(公式9)、轨迹点法向量对时间的一阶导(公式10)、参考线投影点切向量对时间的一阶导(公式11)、参考线投影点法向量对时间的一阶导(公式12)、轨迹点加速度(公式13)
推导
经过预备知识的学习,问题就转化为了:
若已知笛卡尔坐标系下:
轨迹点的位矢、速度、加速度、曲率:rt、vt、at、kt
参考线的起点坐标:(xs,ys)
求Frenet坐标系下:
s,s˙,s¨,l,dsdl(l′),dsd2l(l′′)
1.求解第1步——计算投影点相关信息:
依据几何关系找到当前待计算轨迹点t在参考线上的投影点并计算(具体方法再写一篇):
投影点的切向量和法向量:τb、nb
,投影点的位矢、曲率、方向角:rb=(xb,yb)、kb、θb
根据简单的三角函数关系可得:
τb=(cosθb,sinθb)、nb=(−sinθb,cosθb)
2.依据向量关系求解:
(1).求解l:
依据向量关系rt=rb+l∗nb,两边同时乘nb可得:l=nb(rt−rb);
(2).求解s˙:
(3).求解l˙:
在(2)的推导中:两边同时乘τb的步骤改为两边同时乘nb直接得到:
l˙=vt⋅nb
(4).求解l′=dsdl:
dsdl=dtdsdtdl=s˙l˙=1−l∗kb∣vt∣cos(θt−θb)vt⋅nb
(5).求解s¨:
这一步骤太麻烦了,先给个结论:
s¨=1−kb⋅lat⋅τb+1−kb⋅ls˙2⋅kb⋅l′+1−kbls˙2(kb′l+kbl′)
(6).求解l¨:
l¨=at⋅nb−kb(1−kbl)s˙2
(7).求解l′′=dsd2l:
l′′=dsd2l=dsds˙l˙=s˙2l¨−l′s¨
笛卡尔坐标转Frenet坐标公式总结
l=nb(rt−rb)
l˙=vt⋅nb
l¨=at⋅nb−kb(1−kbl)s˙2
s˙=1−kb⋅l∣vt∣⋅cos(θt−θb)
s¨=1−kb⋅lat⋅τb+1−kb⋅ls˙2⋅kb⋅l′+1−kbls˙2(kb′l+kbl′)
l′=s˙l˙
l′′=dsd2l=dsds˙l˙=s˙2l¨−l′s¨
其中t为下标的量代表轨迹点(车辆点)相关的信息,b为下标的量代表投影点相关的信息。
想要完成笛卡尔坐标到自然坐标系的转换,不仅仅是套用计算公式就行,我们需要知道车辆的速度、加速度、位矢,投影点的曲率、切向量、法向量,那么如何得到这些信息呢,车辆轨迹点的信息应该是上游的定位模块给输出给我们,而匹配点信息需要依据高精地图给出的参考线(是离散点)信息进行计算,下一篇讲解投影点相关信息的计算。


