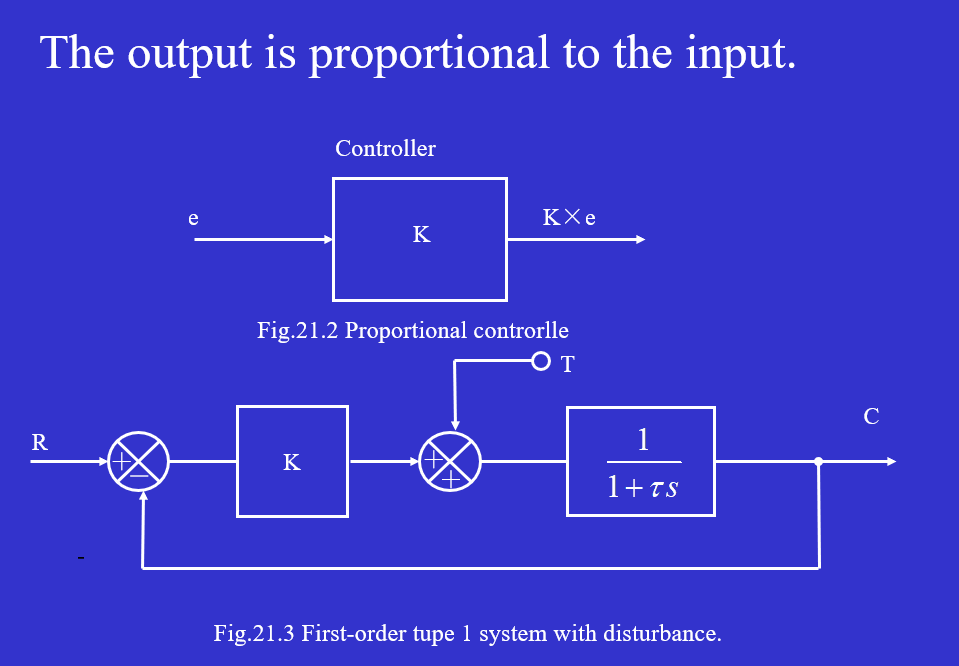
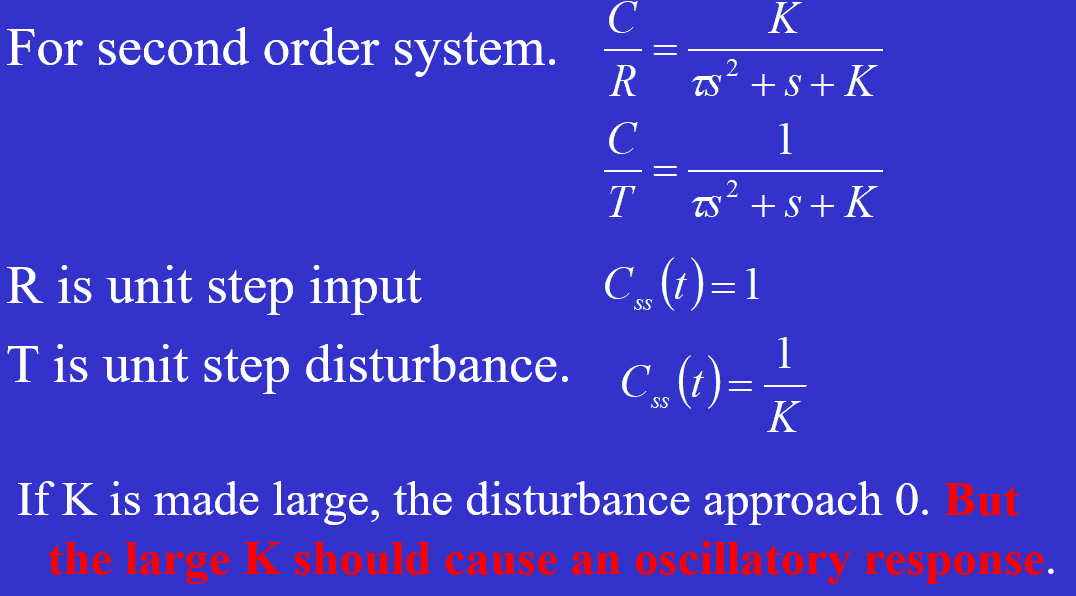
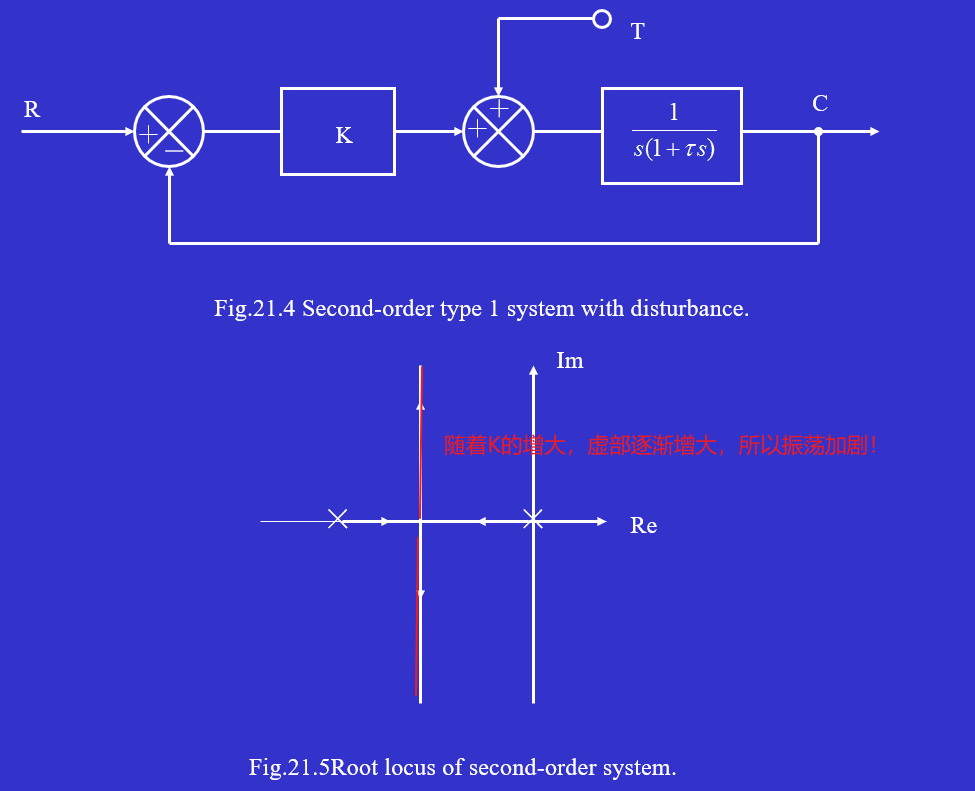
Proportional Control
结论:
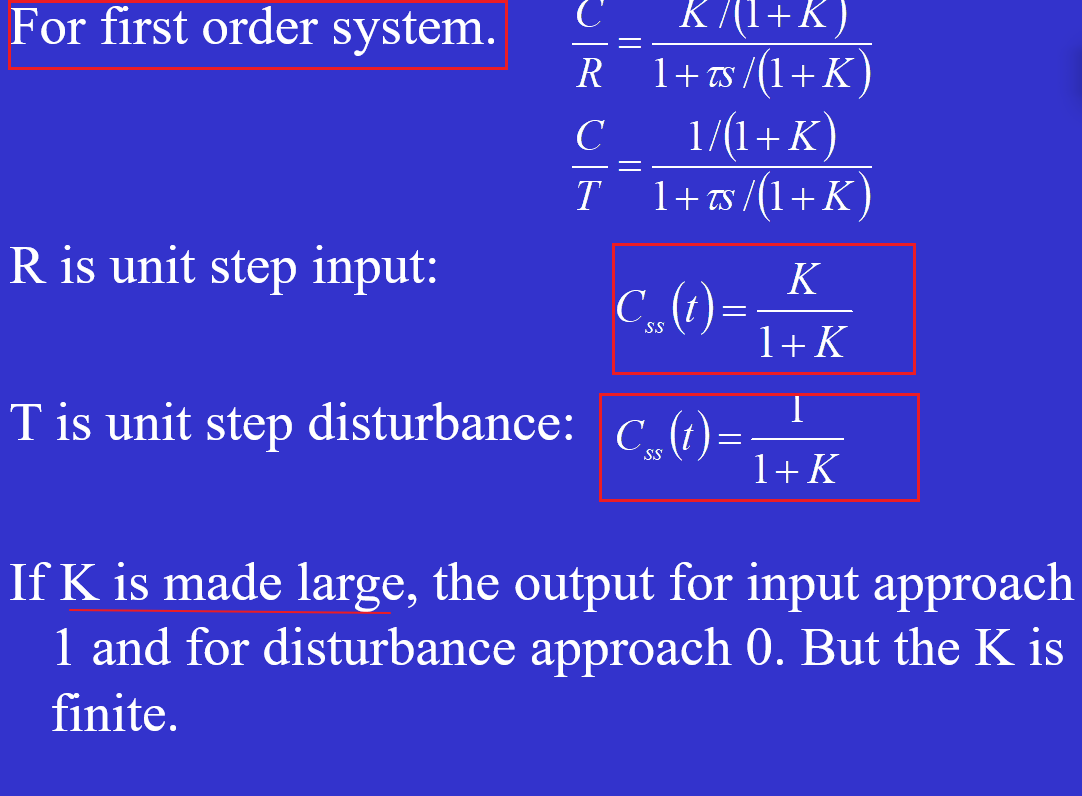
- P控制在试图获得稳态误差(准),干扰抑制(稳)和瞬态响应(快)方面的良好性能方面取得的成功有限。大白话:不能很好的满足“稳快准”的动态性能的要求

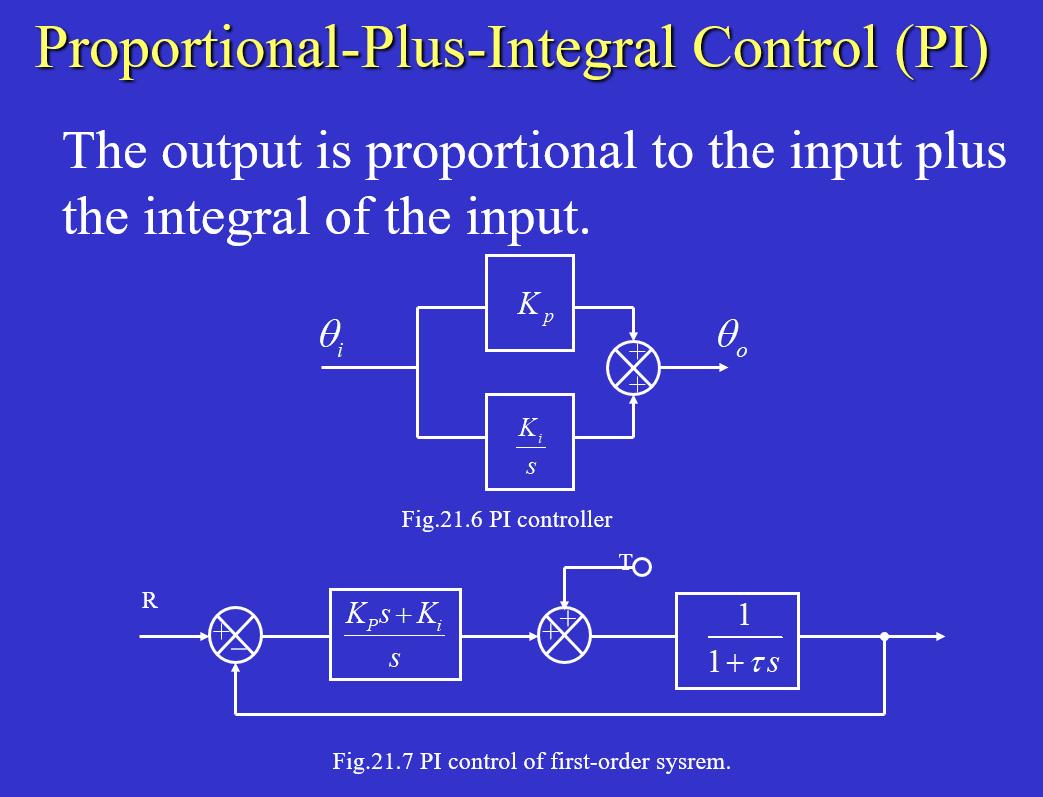
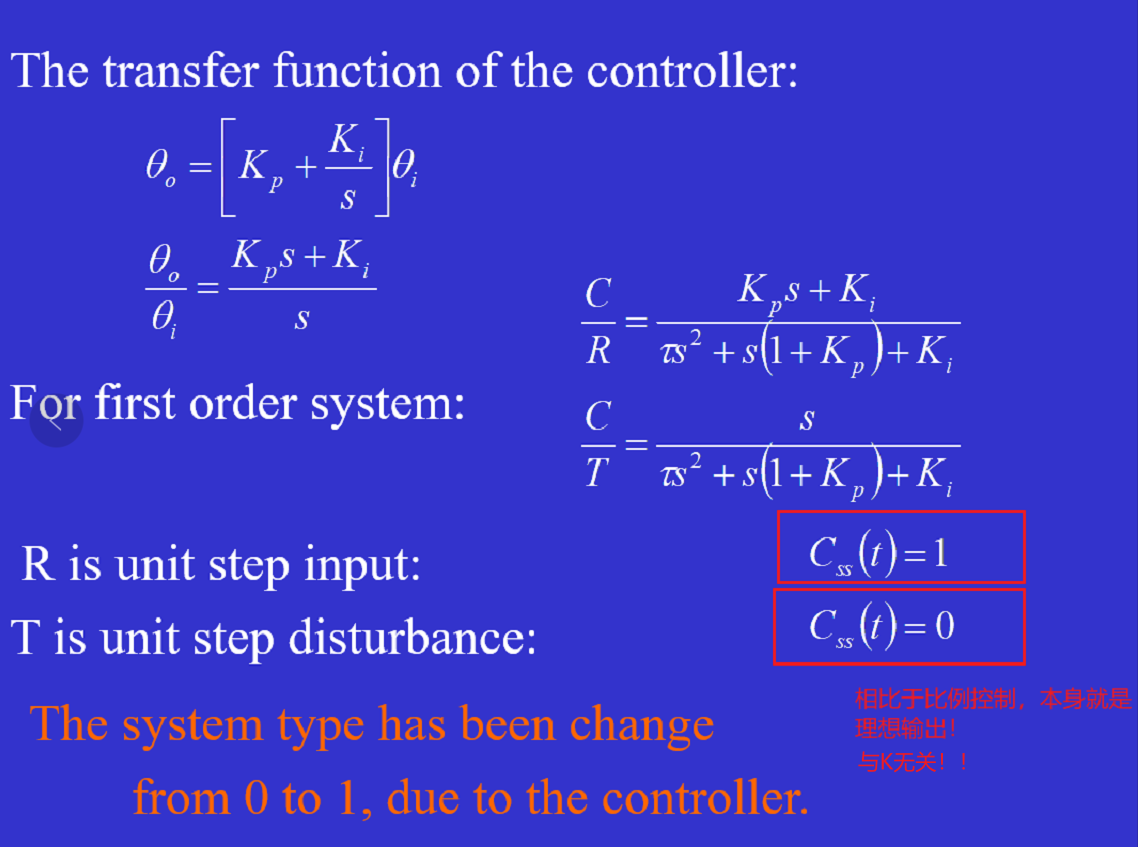
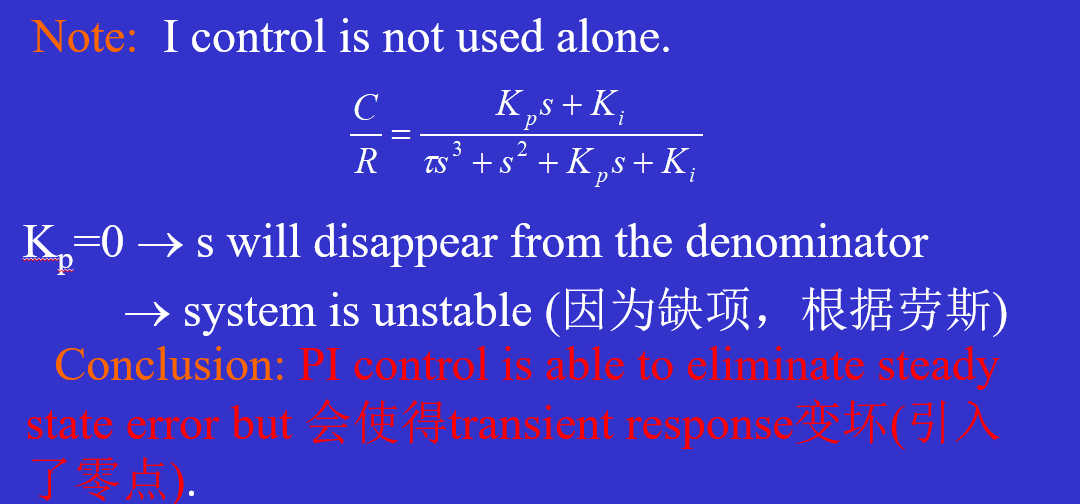
Proportional-Plus-Integral Control (PI)
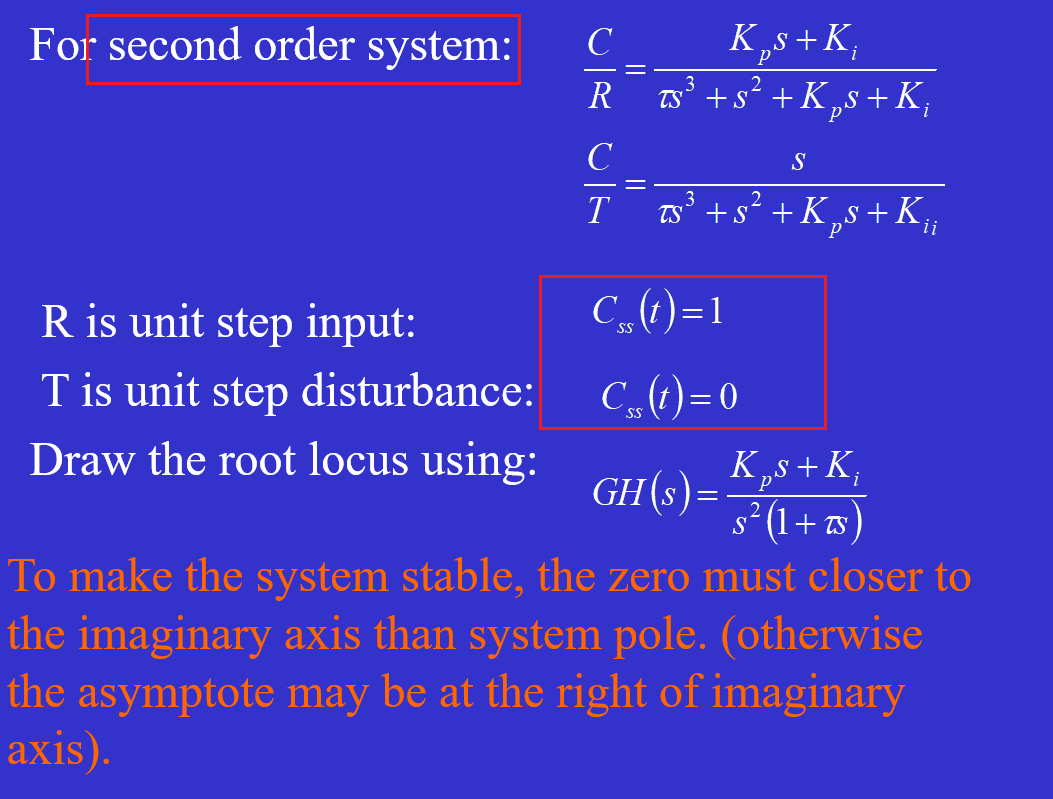
缺点:
Proportional-Plus-Derivative Control (PD)
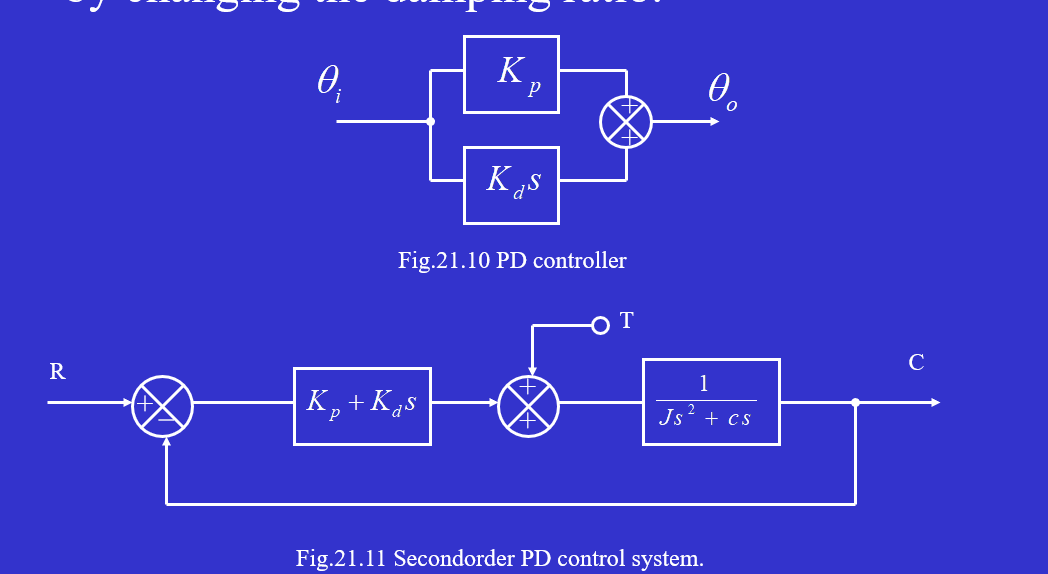
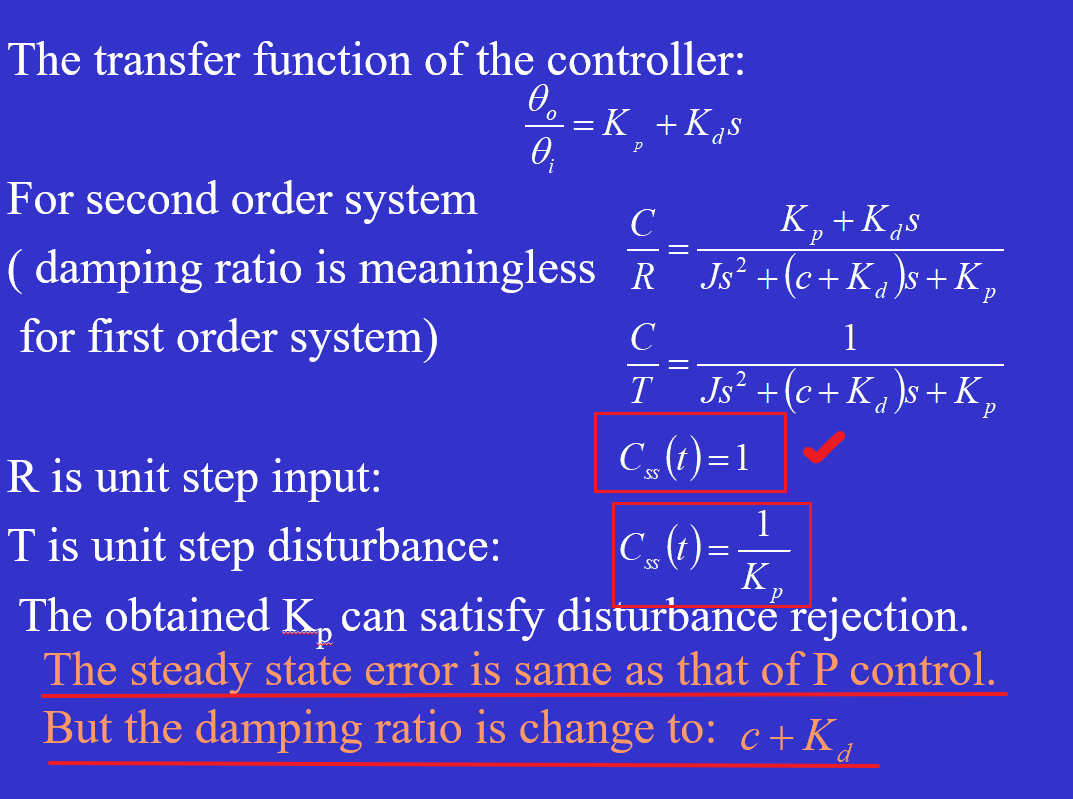
缺点:The steady state error is same as that of P control
优点:Kd可以改变以改善系统的动态特性
微分控制永远不会单独使用,而是始终与比例分量一起使用。 原因是为了避免噪音。 微分器可以放大噪声。
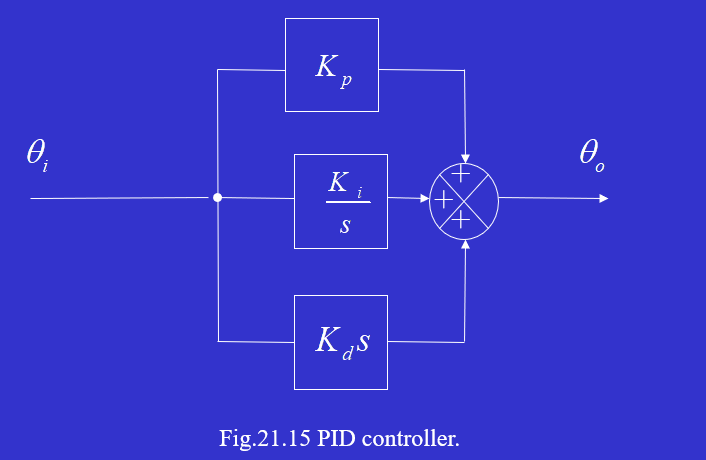
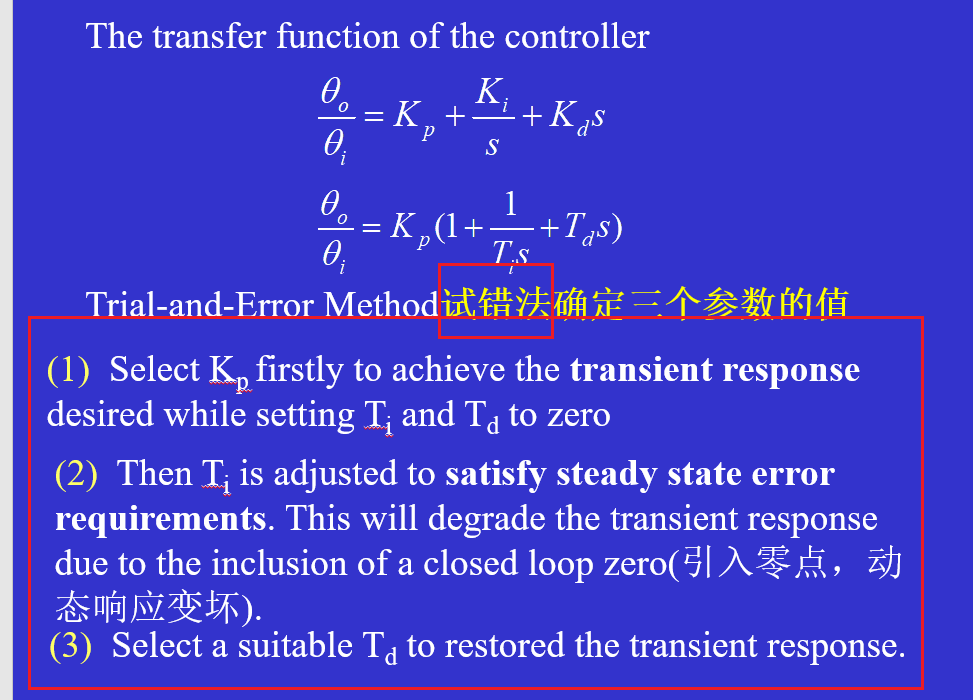
Proportional-Plus-Integral-Plus-Derivative Control (PID)
★
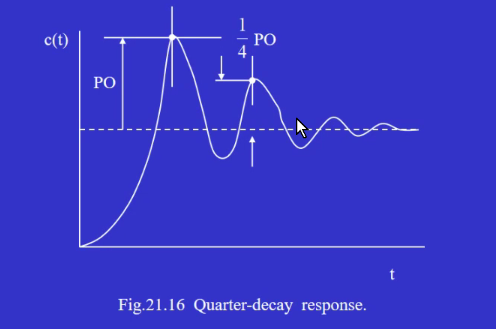
① Quarter-decay method
- 根据上述原则调参,调到第二次超调为第一次超调的1/4,这样的系数比较好
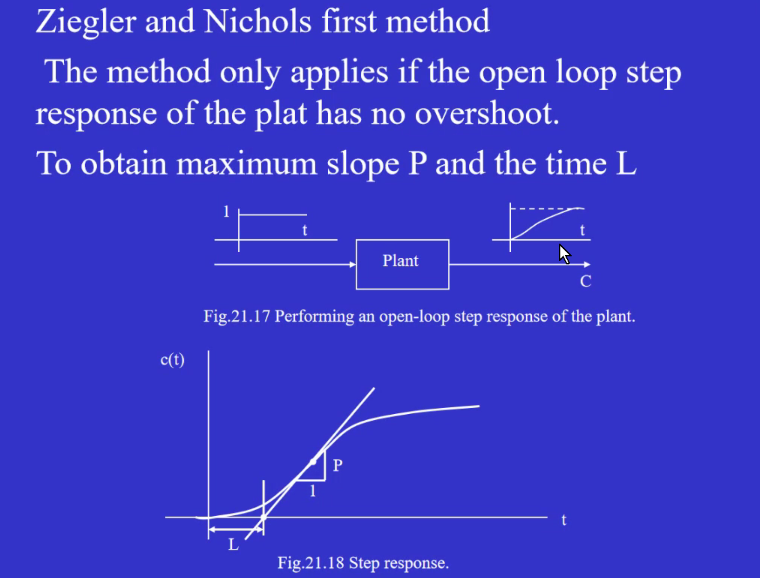
②Ziegler and Nichols first method
- 前提:开环传函的阶跃响应没有PO
- 去找最大的斜率(找拐点P点),直线和实轴的交点LL
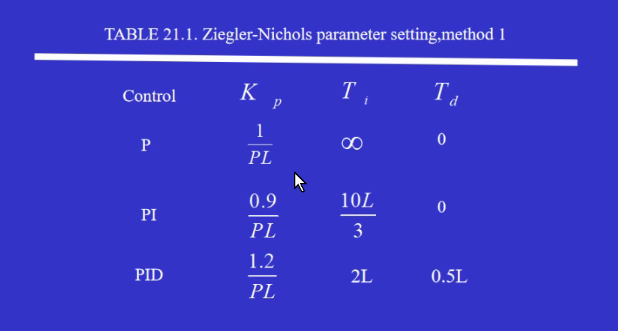
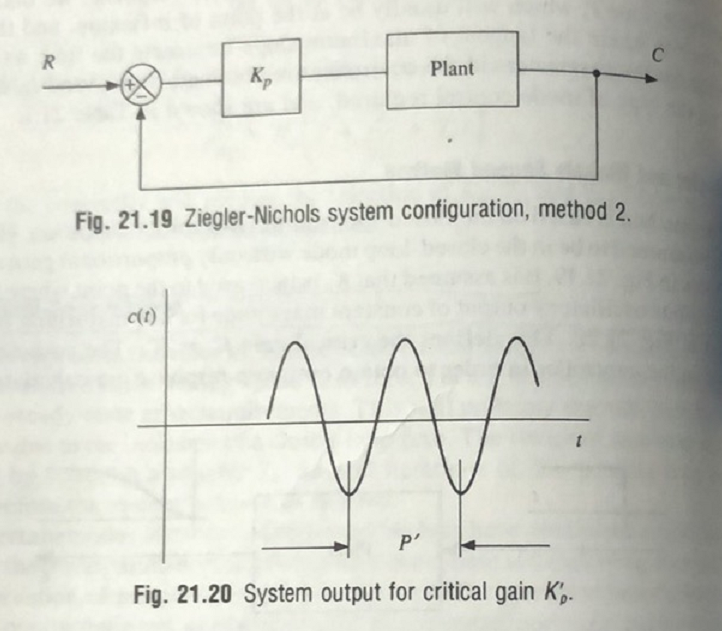
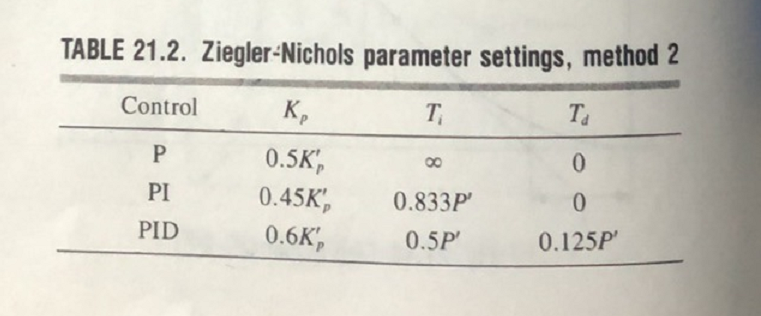
③先调Kp调大,使得系统的阶跃响应正好是个等幅振荡(对于任何的干扰输入都是一个等幅振荡),求出等幅振荡的周期P,由下图确定三个参数