Module19 phase lead compensation相位超前校正
性能要求与波特图中频率轴区域之间的关系:(The relationship between performance requirements and region of frequency axis in Bode diagram
- 稳态误差与低频的幅度有关(因为稳态误差使用终值定理s->0);The steady state error relates to the magnitude at low frequency.
- 瞬态响应要求与
有关;The transient response requirement relates to gain crossover frequency 【注】与
相关,所以和瞬态响应相关
两种方法:
-
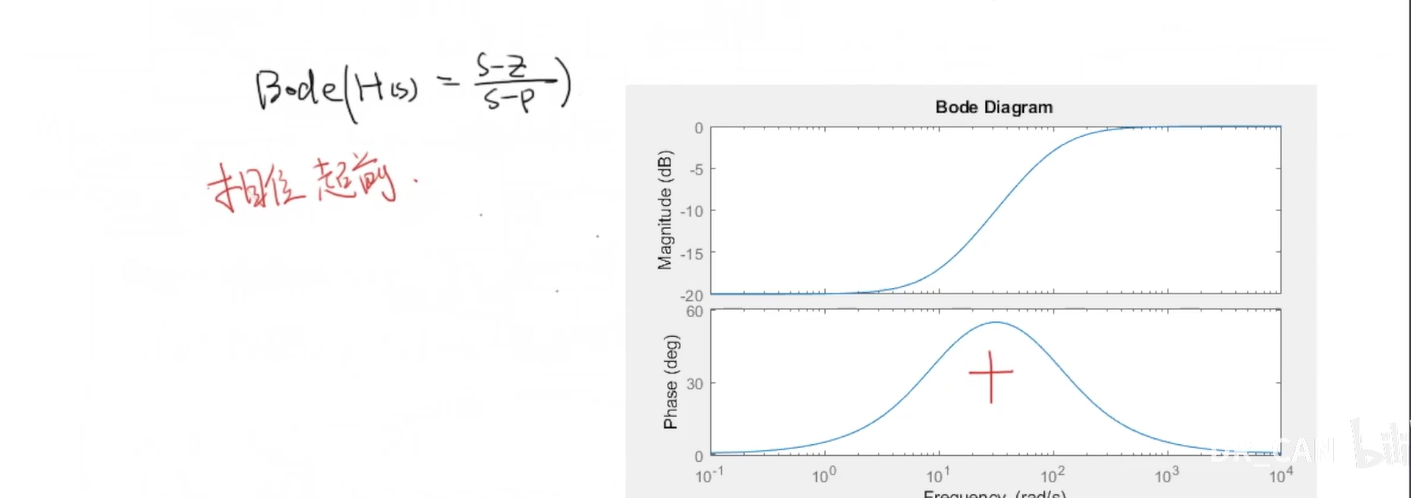
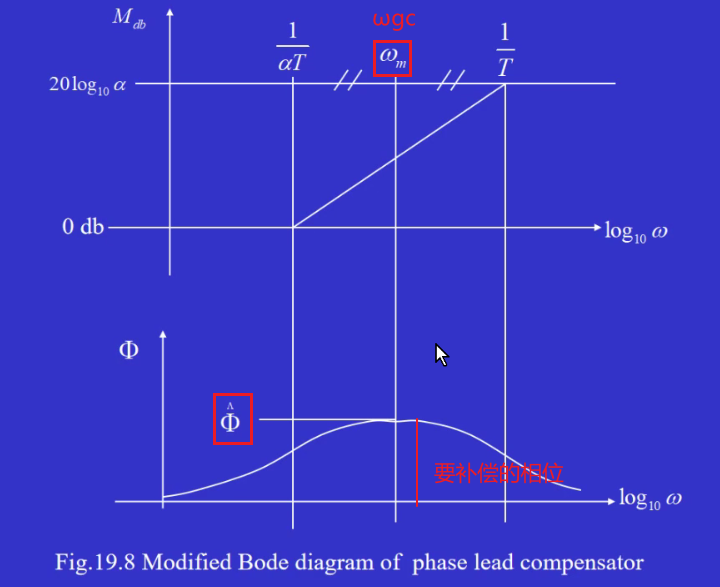
phase lead compensation:改变相频特性曲线,不改变幅频特性曲线
-
phase lag compensation:改变幅频特性曲线,不改变相频特性曲线
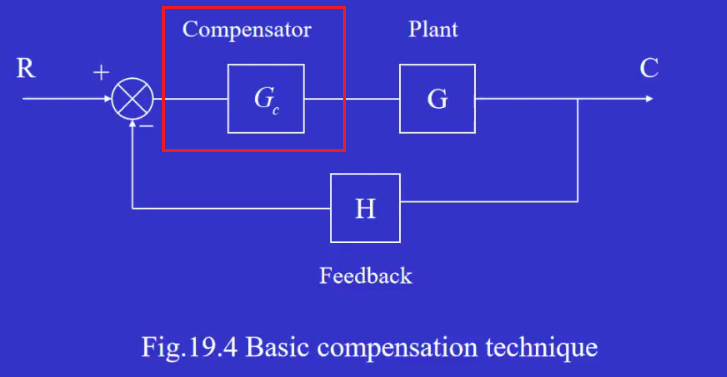
加补偿器
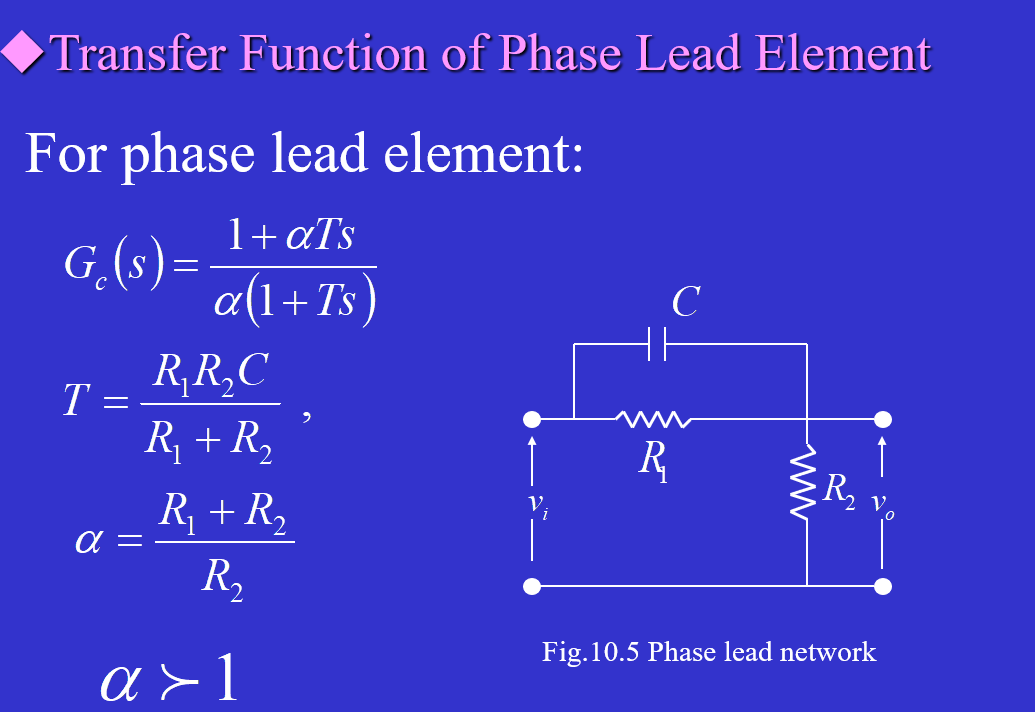
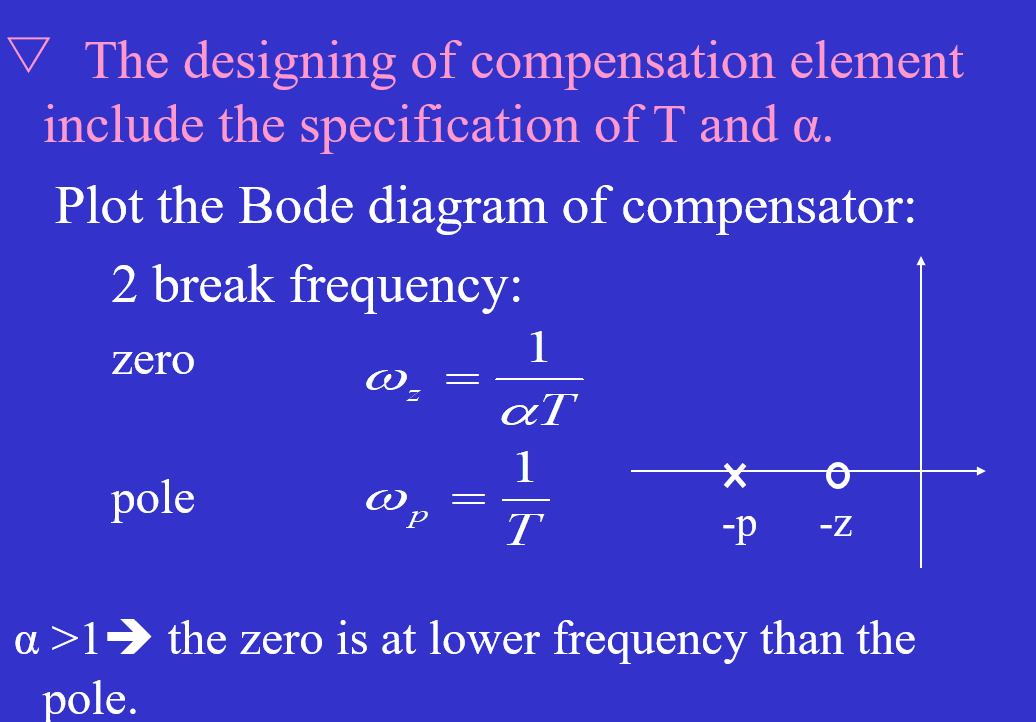
相位补偿和α、T的关系:
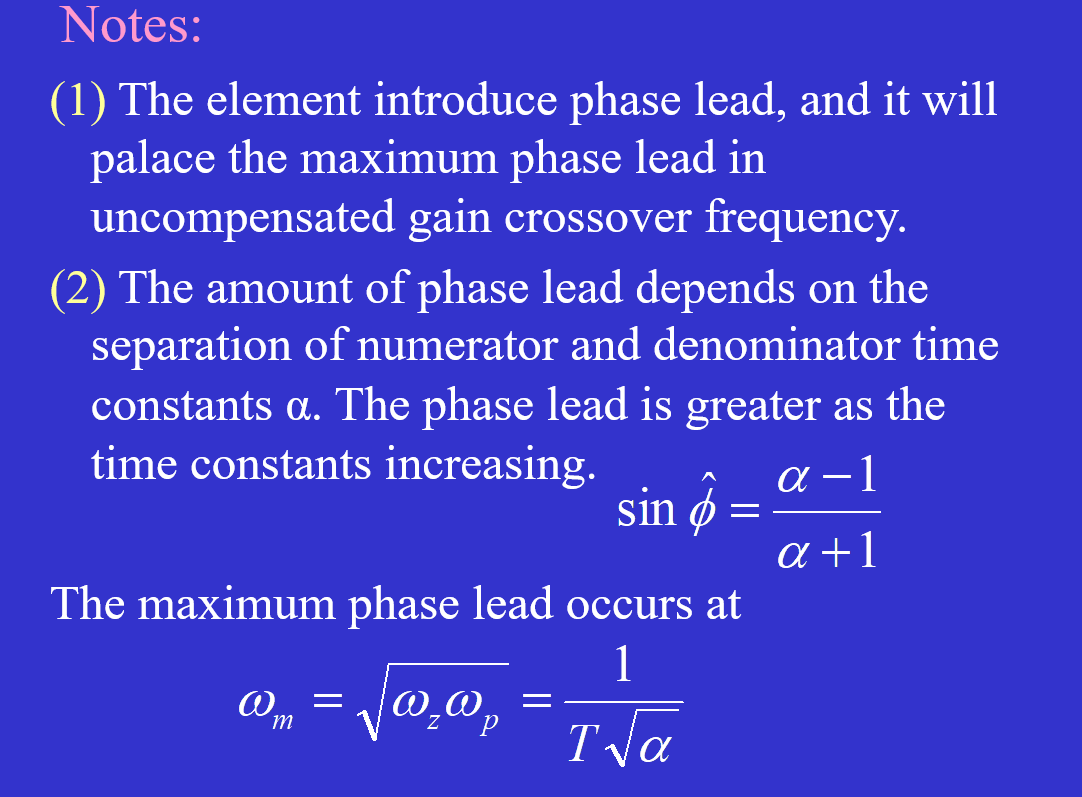
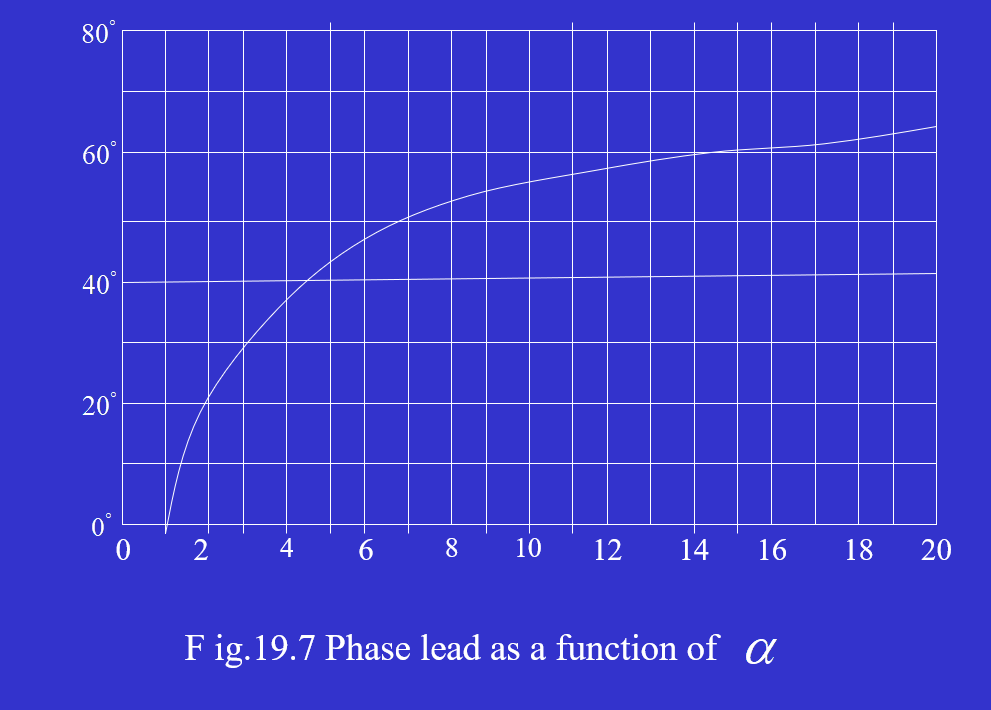
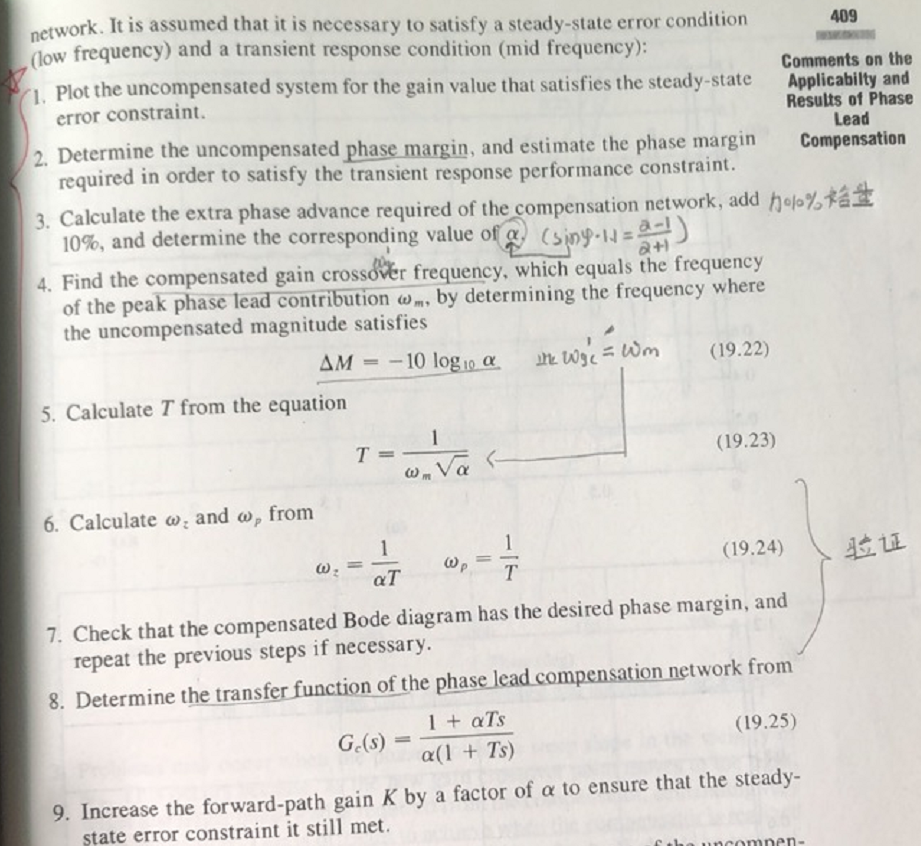
- Step1:确定你要补偿的相位
,然后根据
/查图19.7得出α的取值
- Step2:
,α确定,故根据
便可求出T
【注】但是出现问题!前面说过phase lead compensation:改变相频特性曲线,不改变幅频特性曲线,但是这个补偿器会让幅频特性曲线也往上抬,使得在往右移,使得最后补偿的PM变小了!
如何解决问题:
- ①给定PM大一点,这样出现问题使PM变小,让他刚好到原先定的PM,不好!×
- ②困难:
=-10lgα与幅频特性曲线的交点的频率,这个
在右移后会落在零分贝线上!√过程如下
☆
讲义




DR_CAN