

概述
系统: 系统就是一组变化现象的集合
如何描述变化-> 微分
所以本书就是在研究线性微分方程
自动控制其实就是研究
如何解常微分方程(幅、频响应,工具为傅里叶变换和拉普拉斯变换)
以及如何改造系统(负反馈控制,如PID控制),使其方程的解有更高的截止频率,已达到动态的响应要求。
线性系统:
引子
对v这个向量施加A矩阵的线性变换,相当于不改变v的方向,而改变其大小
从映射的角度看:
解出
将λ扩展到一般矩阵
state function:
输入方程:
meaning:一个系统,输入,变量
会在坐标系
中是如何变化的
输出方程:
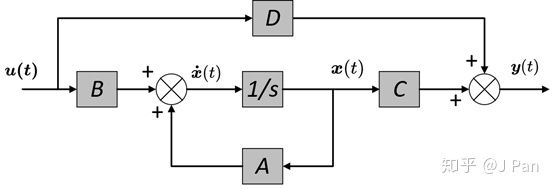
这种通过状态方程来描述系统的方式,我们一般称现代控制理论。现代控制理论的状态方程,用矩阵刻画了系统的内部结构,将系统的变化轨迹投影到更简单的坐标系上,从而可以在各个维度上进行描述。
如何求解状态方程
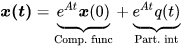
第一个部分:零输入部分;通解
第二个部分:非零输入部分;特解
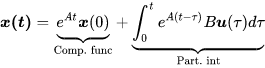

我们不需要进行拉普拉斯变换了,直接在时域就可以求解。因此,这种方法也称之为时域法。
