

五、马尔科夫随机场
原文:Markov random fields
译者:飞龙
协议:CC BY-NC-SA 4.0
自豪地采用谷歌翻译
贝叶斯网络是一类模型,可以紧凑地表示许多有趣的概率分布。 但是,我们在前一章已经看到,一些分布不能完全用贝叶斯网络来表示。
在这种情况下,除非我们想在我们的模型的变量之间引入错误的独立性,否则我们必须回到不太紧凑的表示形式(可以将其视为带有不必要的额外边的图)。 这产生了模型中不必要的额外参数,并且使得学习这些参数和做出预测更加困难。
然而,存在另一种技术,用于紧凑地表示和可视化基于无向图的语言的概率分布。 这类模型(称为马尔科夫随机场或 MRF)可以紧凑地表示有向图模型无法表示的分布。 我们将在本章中探讨这些方法的优点和缺点。
马尔科夫随机场
作为一个启发示例,假设我们正在建模A, B, C, D人的投票偏好。 假设(A,B), (B,C), (C,D)和(D,A)是朋友,朋友往往有类似的投票偏好。 这些影响可以自然地由一个无向图表示。
定义A,B,C,D的联合投票决策的概率的一种方法是,将分数赋给这些变量的每个赋值,然后将概率定义为标准化分数。 分数可以是任何函数,但在我们的例子中,我们将其定义为这种形式:

其中ϕ(X,Y)是因子,如果对朋友X, Y的投票一致,它赋予更多权重,例如:
非标准化分布中的因子通常被称为因子。 最终的概率定义为:

其中  是标准化常数,确保整个分布和为一。
是标准化常数,确保整个分布和为一。
当标准化时,我们可以将ϕ(A,B)视为一种交互,推动B的投票更接近A的投票。ϕ(B,C)项推动B的投票更靠近C,最可能的投票将需要协调这些冲突影响。
请注意,与有向情况不同,我们没有说明如何从另一组变量生成一个变量(如条件概率分布所做的那样)。 我们只是指出图中非独立变量之间的耦合程度。 从某种意义上说,这需要较少的先验知识,因为我们不再需要讲一个完整的生成性故事,说明B的投票是如何从A的投票中构建出来的(如果我们有P(B|A)因子,就需要这样)。 相反,我们只需确定非独立变量,并定义它们相互作用的强度;这又定义了可能的赋值空间上的能量格局,并且我们通过标准化常数将此能量转换为概率。
形式定义
马尔科夫随机场(MRF)是由变量x1, ..., xn组成的概率分布p,由无向图G定义,其中节点对应于变量xi。 概率p形式为:
其中C表示G的团集合(即完全连通子图)。
是标准化常数,确保整个分布和为一。
因此,给定图G,我们的概率分布可能包含一些因子,它的范围是G中的任何团,可以是单个节点,边,三角形等。注意,我们不需要为每个团指定因子。 在我们上面的例子中,我们在每个边上定义了一个因子(这是两个节点的团)。 但是,我们选择不指定任何单一因子,即单个节点上的团。
与贝叶斯网络比较
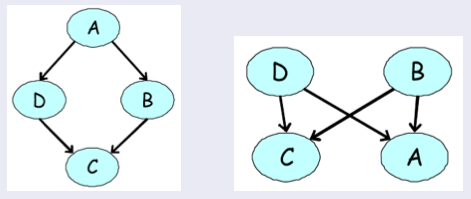
用于我们的四变量投票示例的有向模型示例。 他们都不能准确地表达,我们的变量之间依赖结构的先验知识。
在我们之前的投票例子中,A, B, C, D的分布满足A⊥C|{B,D}和B⊥D|{A,C}(因为一个人的投票只受朋友直接影响)。 我们可以很容易地通过反例来检查,这些独立性不能完全由贝叶斯网络表示。 然而,MRF 结果是这个分布的完美映射。
更一般地说,MRF 与有向模型相比有几个优点:
- 它们可以应用于更广泛的问题,其中没有和变量依赖相关的天然方向性。
- 无向图可以简洁地表达某些依赖关系,贝叶斯网络不容易描述它们(尽管反过来也是如此)。
它们也有几个重要的缺点:
- 计算归一化常数
Z需要对可能为指数数量的赋值进行求和。 在一般情况下,我们会看到这将是 NP 难的;因此许多无向模型是棘手的并需要近似技术。 - 无向模型可能难以解释。
- 从贝叶斯网络生成数据要容易得多,这在某些应用中很重要。
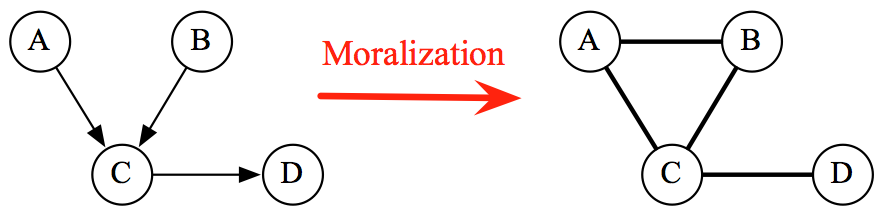
不难看出,贝叶斯网络是 MRF 的特例,带有非常特定类型的团聚因子(对应于条件概率分布并且暗示图中的有向非循环结构)和归一化常数 1。 特别是,如果我们取一个有向图G,并向给定节点的所有父节点添加侧边(并消除它们的方向性),那么CPD(看做变量及其祖先的因子)可以在生成的无向图上因式分解。 由此产生的过程被称为规范化(Moralization)。
贝叶斯网络总是可以转换成标准化常数为 1 的无向网络。 反过来也是可能的,但是可能在计算上难以处理,并且可能产生非常大的(例如全连通的)有向图。
因此,MRF 比贝叶斯网络具有更多的功能,但更难以计算处理。 一般的经验法则是,尽可能使用贝叶斯网络,如果没有使用有向图对问题进行建模的自然方式(例如我们的投票示例),只能切换为 MRF。
MRF 中的独立性
回想一下,在贝叶斯网络的情况下,我们定义了由有向图G描述的一组独立性I(G),并展示了它们如何描述必须在分布p中保持的真正独立性,分布p在有向图上因式分解,也就是I(G)⊆I(p)。
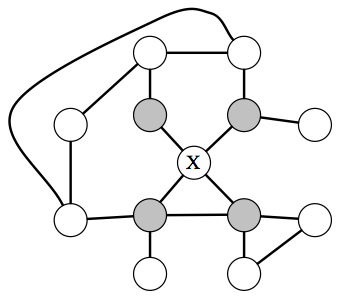
在 MRF 中,以所有邻居为条件,节点X独立于图的其余部分(称为X的马尔可夫毯)。
那么可以通过无向 MRF 描述哪些独立性? 这里的答案非常简单直观:如果变量x,y由未观测变量的路径连接,则它们是相关的。 但是,如果x的邻居都被观察到,那么x与所有其他变量无关,因为它们只能通过它的邻居影响x。
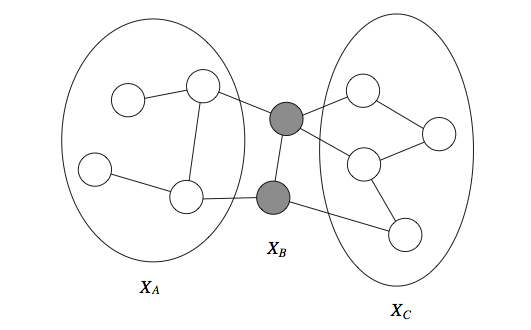
特别是,如果一组观察变量在图的两半之间形成一个切集,则一半的变量与另一半的变量无关。
形式上,我们将变量X的马尔可夫覆盖集U定义为节点的最小集合,满足如果观察到U,X与图的其余部分无关,即X⊥(X−{X}−U)|U。 这个概念适用于有向和无向模型,但在无向情况下,马尔可夫毯变成仅仅是节点的邻居。
在有向的情况下,我们发现I(G)⊆I(p),但是存在分布p,其独立性不能用G来描述。在无向情况下,同样的情况也成立。 例如,考虑由有向v结构描述的概率(即 explaining away 现象)。 无向模型不能描述独立性假设X⊥Y。
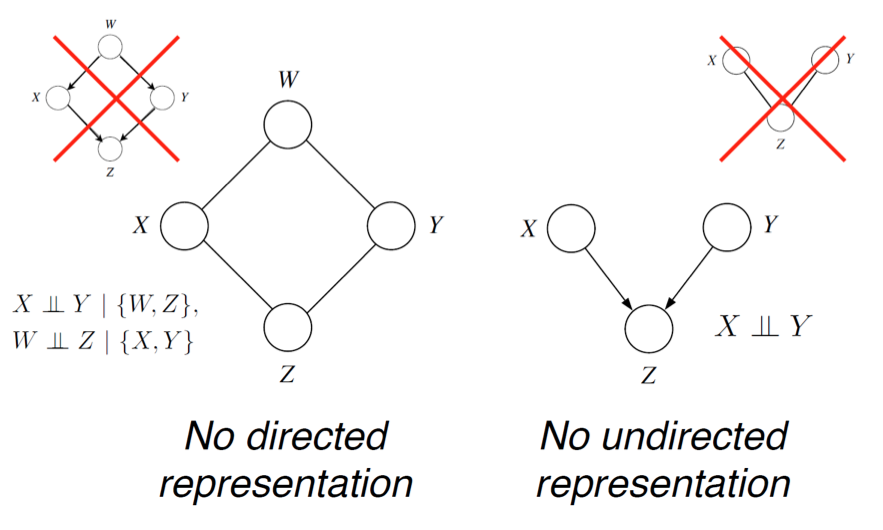
具有完美的有向图表示,但没有无向表示的概率分布示例,以及反例。
条件随机场
当马尔可夫随机场用于模拟条件概率分布p(y|x)时,它们的一个重要特例就产生了。 在这种情况下,x∈X和y∈Y是向量值变量; 我们通常以x为条件,并且希望说一些y的有趣的东西。 通常情况下,这种分布将出现在监督式学习设定中,其中y将是我们试图预测的向量值标签。 这个设定通常称为结构化预测。
示例
作为一个启发示例,考虑从字符图像序列xi∈[0,1] d×d中识别单词的问题,它以像素矩阵形式提供给我们。 我们的预测器的输出将是一系列字母yi∈{'a', 'b', ..., 'z'}。
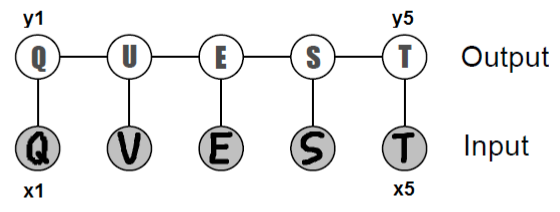
用于光学字符识别的链式结构的条件随机场。
我们原则上可以训练一个分类器,从它的xi中分别预测每个yi。 然而,由于这些字母组合在一起形成一个词,所以跨越不同i的预测应该互相知道。 在上面的例子中,第二个字母本身可以是'U'或'V';然而,由于我们可以高度自信地判断其邻居是'Q'和'E',我们可以推断'U'是最可能的真实标签。
CRF 将成为一个工具,使我们能够联合执行这个预测。
形式定义
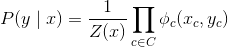
形式上,CRF 是个变量X∪Y上的马尔科夫网络,规定了条件分布:
分区函数为:
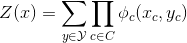
请注意,在这种情况下,分区常量现在取决于x(因此,我们说它是一个函数),这并不令人惊讶:p(y|x)是由x参数化的y的概率,即对于每个x,它编码 了不同的概率函数。 在这个意义上,对于每个输入x,条件随机场产生了新的马尔可夫随机场的实例。
示例(续)
更正式地说,假设p(y|x)是一个链式 CRF,具有两种类型的因子:i = 1, ..., n的图像因子ϕ(xi,yi),它赋予与xi一致的yi更高的值 - 以及i = 1, ..., n-1的成对因子  。 我们也可以将
。 我们也可以将ϕ(xi,yi)看作概率p(yi|xi),由标准(非结构化)softmax 回归提供;可以将 看作字母的经验频率,它们从大量英文文本(例如维基百科)中获得。
在这个形式的模型的条件下,我们可以使用 MAP 推断,联合推断结构化标签y。

CRF 特征
在多数实际应用中,我们进一步假设,因子ϕc(xc,yc)形式为:

其中fc(xc,yc)可以是描述xc和yc之间兼容性的任意一组特征。
在我们的 OCR 例子中,我们可以引入特征f(xi,yi);它编码字母yi与像素xi的兼容性。 例如,f(xi,yi) 可能是字母yi的概率,由逻辑回归(或深度神经网络)评估像素xi而产生。 另外,我们在相邻字母之间引入了特征  。 它们可以是
。 它们可以是  形式的指标,其中
形式的指标,其中l1,l2是字母表中的两个字母。 然后,CRF 将学习权重w,它将为连续字母(l1,l2)的更常见的概率赋予更多的权重,同时确保预测的yi与输入xi一致;
这个过程会让我们在xi不明确的情况下确定yi,就像我们上面的例子一样。
需要对 CRF 特征做出最重要的认识是,它们可以任意复杂。 事实上,我们可以定义一个 OCR 模型,其因子  ,这取决于整个输入
,这取决于整个输入x。 这完全不会影响计算性能,因为在推断时间内,x总会被观察到,而我们的解码问题将涉及到最大化:

其中  。使用全局特征只会改变因子的值,但不会改变它们的范围,它们具有相同类型的链结构。我们将在下一节中看到,这种结构是所需的,确保我们可以轻松解决这个优化问题。
。使用全局特征只会改变因子的值,但不会改变它们的范围,它们具有相同类型的链结构。我们将在下一节中看到,这种结构是所需的,确保我们可以轻松解决这个优化问题。
x,y上的单一模型,归一化常数为
 )来建模
)来建模p(x,y),那么我们需要将两个分布拟合为数据:p(y|x)和p(x)。然而,如果我们感兴趣的是给定x预测y,那么p(x)的建模是不必要的。事实上,这样做统计上可能是不利的(例如,我们可能没有足够的数据来拟合p(y|x)和p(x);因为模型具有公共参数,所以拟合一个可能产生另一个的最佳参数),它可能在计算上不是好主意(我们需要做出分布中的简化假设,以便容易地处理p(x))。
CRF 放弃了这个假设,并且往往在预测任务上表现更好。