

本文转载自雪岭飞花和巫婆塔里的工程师
01
基本原理
一、毫米波雷达概览
1)发展历程
毫米波雷达的发展历史非常悠久,早期主要用在军事和航空航天领域。
20 世纪 70 年代,毫米波雷达开始在汽车上测试。当时雷达尺寸比较大,处于摸索阶段。在 1973 年,德国 AEG-Telefunken 和博世公司共同研制汽车防撞雷达,由于价格昂贵、体积庞大等原因,导致项目终止。

图片来源:H. H. Meinel, “Evolving automotive radar – from the very beginnings into the future,” in 8th European Conf. Antennas and Propagation, 2014, pp. 3107-3114.
20 世纪 90 年代初期,24GHz 毫雷达 AEB 系统(VORAD)开始应用在美国的校车和长途巴士上。
早期,车载毫米波雷达采用机械扫描方案。例如,大陆发布的机械扫描雷达 ARS300。
图片来源:Antenna Conceptsfor Millimeter-Wave Automotive Radar Sensors
2009 年,德尔福发布电子扫描雷达 ESR。
2020 年 9 月,大陆发布 4D 成像毫米波雷达 ARS540,并于 2021 年量产。
随着技术的发展,毫米波雷达的探测性能越来越高。
2)基本原理
1. 工作频段与信号体制
车规级毫米波雷达主要工作在 24GHz(ISM 频段,近距)和 77GHz(76-81GHz,主流中远距)频段。 目前主流采用 FMCW(Frequency Modulated Continuous Wave,调频连续波) 信号体制,相比脉冲雷达具有体积小、功耗低、距离-速度联合估计能力强的优势。
2. 核心测量原理
(1)距离测量发射线性调频信号(Chirp): 其中 为调频斜率。 接收回波与发射信号混频后得到差频信号(Beat Frequency),其频率 与距离 关系为:( 为光速)
(2)速度测量(多普勒效应运动目标会产生多普勒频移 。 通过多个 Chirp 的相位变化或 2D-FFT(Range-Doppler FFT)可同时解算距离和径向速度。
(3)角度测量
- 水平/俯仰角:采用数字波束形成(DBF)或 MIMO 虚拟阵列技术。
- 通过多接收天线接收信号的相位差(Phase Difference)计算到达角(AoA): 其中 为天线间距, 为波长。
3. 典型信号处理流程
- ADC 采样 → 去斜(De-ramp)
- Range-FFT(距离维)
- Doppler-FFT(速度维)
- CFAR(恒虚警检测) + 角度估计(MUSIC / ESPRIT / 2D-FFT)
- 目标跟踪(Kalman / IMM 滤波) + 点迹凝聚
4. 4D 成像雷达技术要点
传统 3D 雷达(距离-速度-水平角)通过增加垂直通道数(级联或高密度 MIMO)实现俯仰角估计,从而输出具有高度信息的稠密点云,角度分辨率可达 1° 以内,大幅提升静态目标检测与目标分类能力。
3)分类
- 按照波段
车载毫米波雷达常用的是 24GHz(K 波段)、60GHz(V 波段)和 77GHz(W 波段):
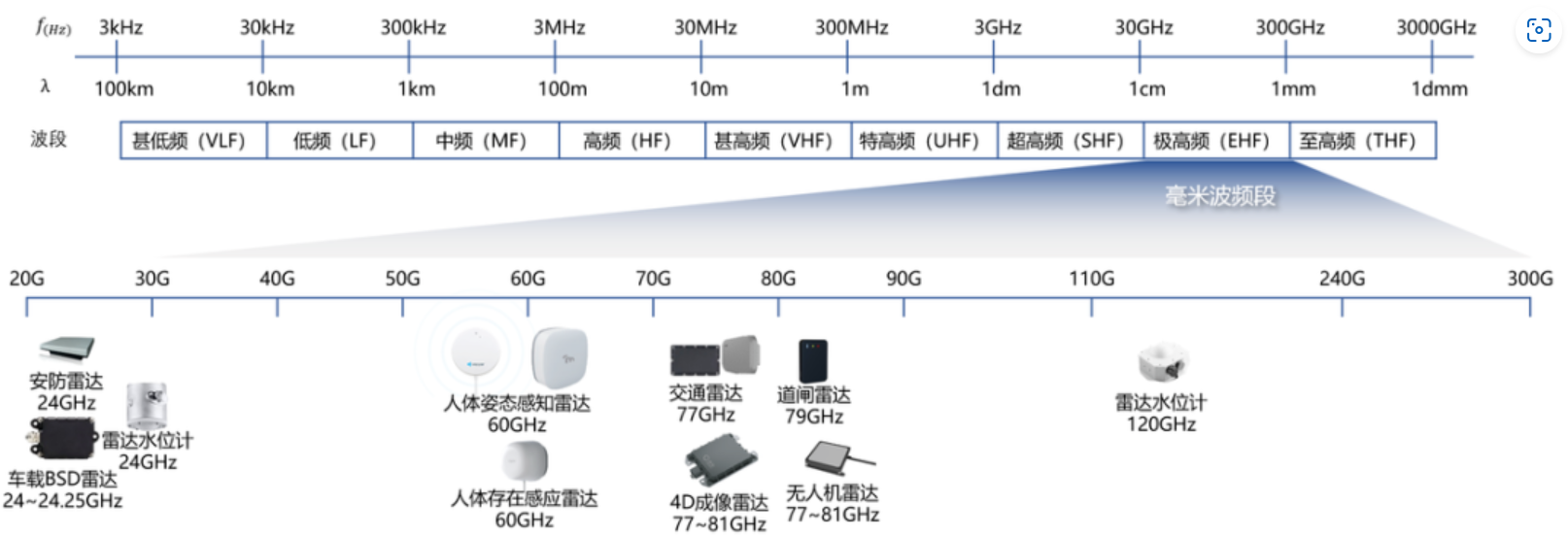
图片来源:工信部、AIoT星图研究院
- 24GHz 雷达:由车载转向家居家电和其他工业领域,2026 年出货量预计在 1673 万颗。
- 60GHz 雷达:主要用于舱内、门防撞等超近距车载场景,以及智慧康养等 AIoT 市场,2026 年国内出货量有望突破 500 万颗。
- 76-79GHz 雷达:这个是目前车载毫米波雷达最常用频段。
在车载领域,24GHz 逐渐淘汰,77GHz 频段已经成为主流。
- 按照测量性能
主要分为 3D 雷达、4D 雷达和 4D 成像雷达。
它们之间的性能区别、其他特征的对比:
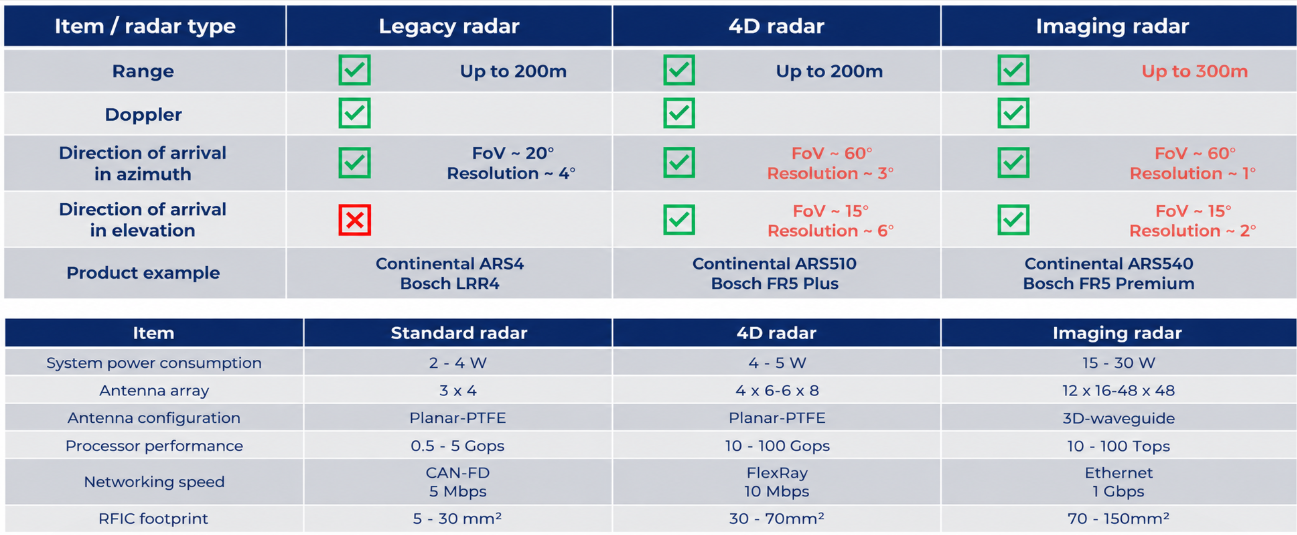
图片来源:Yole
- 按照调制方式
按照调制方式,主要分为 FMCW 和 PMCW 两种方式,这两种体制的原理对比:
其中,FMCW 是车载毫米波雷达应用最为广泛的调制方式。
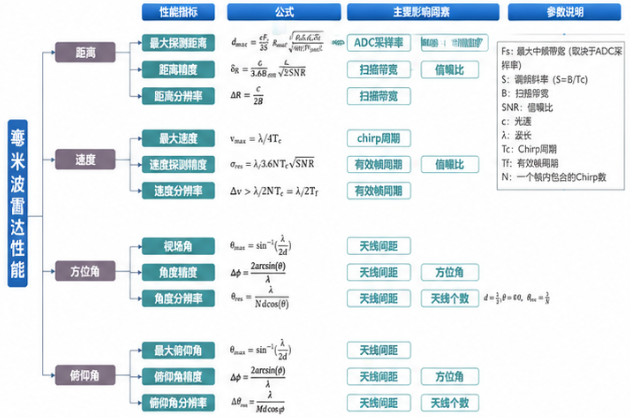
4)性能指标
对于车载毫米波雷达的探测性能,基本指标主要是:距离、速度和角度(水平角和垂直角)的范围、精度和分辨率。
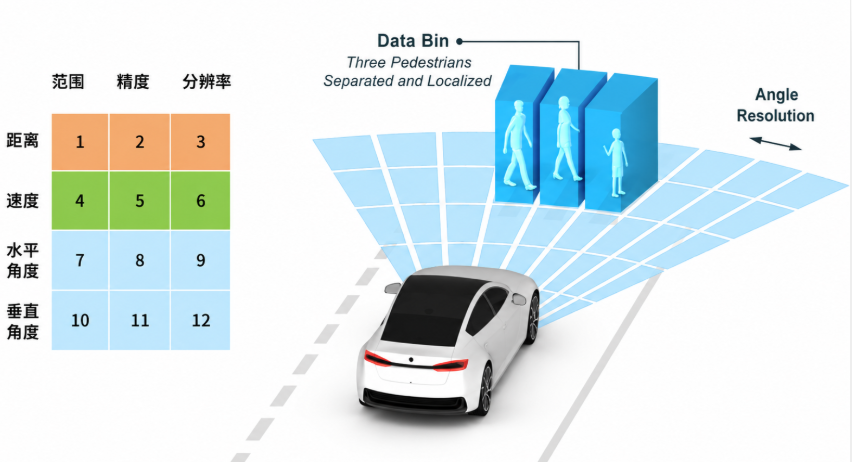
探测性能及其影响因素的关系:
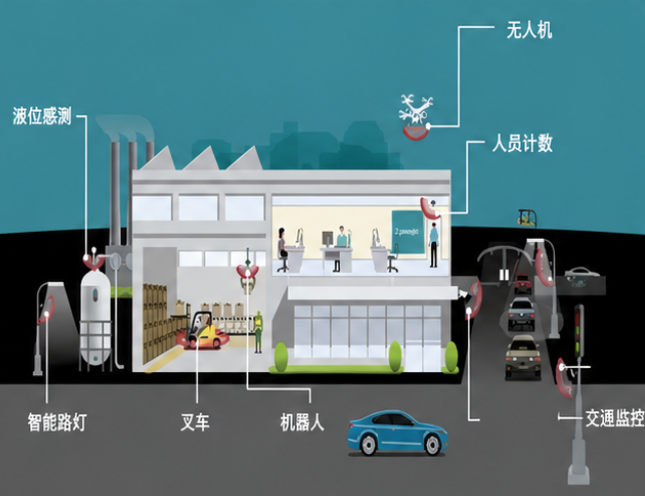
5)主要应用
毫米波雷达的应用非常广泛:

在民用方面,毫米波雷达可应用于智能车载、智能交通、以及机器人、无人机、智能家居、工业测量仪器、全屋智能、家电照明、消费电子等多个领域。
在车载方面,分为舱内和舱外(前雷达、后雷达、角雷达、门雷达):
图片来源:GGAI、头豹、AIOT星图研究院
二、性能分析
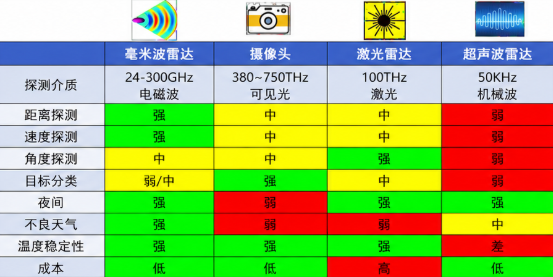
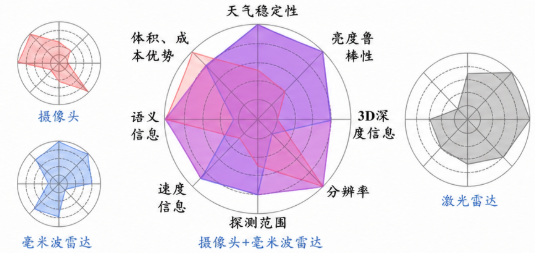
1)毫米波雷达和其他传感器的性能对比
毫米波雷达和相机、激光雷达和超声波雷达的性能对比:
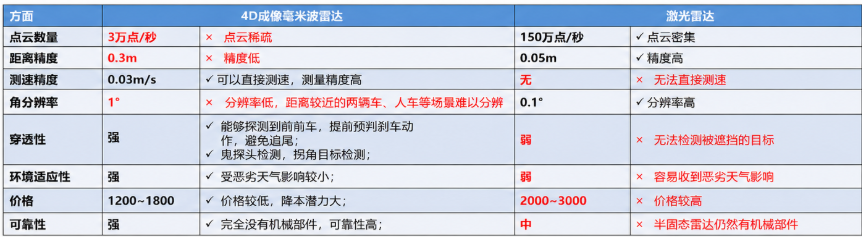
其中,4D 成像毫米波雷达和一般 dToF 激光雷达的对比:
2)毫米波雷达的主要弱势场景
- 多径
在环境较为复杂时,由于电磁波的多次反射,导致在真实目标的周围出现多个虚假目标。多径是毫米波雷达在实际应用中,非常常见的问题之一。
- 干扰
当雷达受到外部电磁波干扰时,会经常出现漏检或者误检。外部电磁波干扰主要来自于道路上其他车载雷达的电磁辐射。
当外部干扰的电磁波频段落入雷达的扫频范围,但是频率变化和雷达不同步,此时雷达本体的噪底会被提升,由于 SNR 变差,从而导致 RCS 较小的目标消失(漏检)。
如果干扰信号扫描是同步的,此时会产生虚假目标(误检)。
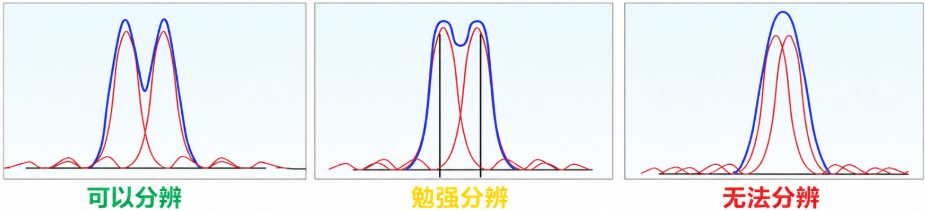
- 分辨率不足
分辨率较低,是毫米波雷达出现误检漏检的另一大重要原因。
分辨率不足的原理示意:
例如,下图中对于前后相距较近的橙色和浅蓝色目标无法区分,感知会输出一个大的深蓝色目标。
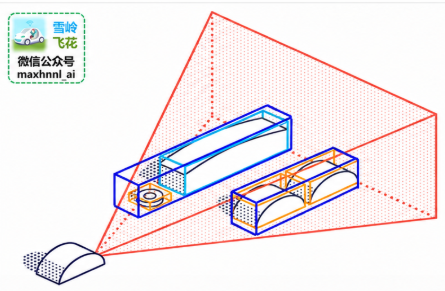
图片参考:Uhnder,后处理:雪岭飞花
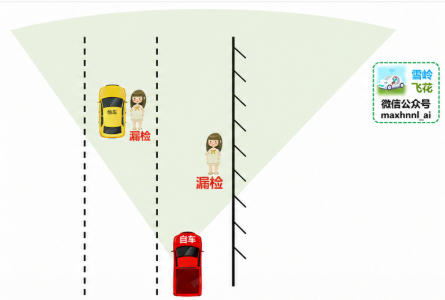
以及,当行人站在车辆或者金属护栏旁边时,行人目标无法被检测。
三、车辆适配
该章节主要包括:整车开发流程、毫米波雷达评价指标、零部件开发,以及常见问题。
首先,在车型开发阶段,车企通常会基于新增功能点、硬件复用以及软硬件协同复用等策略完成雷达方案选型;
随后,通过功能逻辑与点云指标对雷达性能进行评估,重点关注点云数量、噪点控制、目标检测与抗干扰能力等核心指标。进入零部件开发阶段后,需要针对雷达覆盖件开展角度仿真和厚度优化,以确保覆盖件不会影响毫米波传播性能,同时还要综合考虑材料介电常数、安装间隙、曲率半径以及不同塑料材质(如 PC/ABS、PP-EPDM、ASA)对雷达透波性能的影响。
最后,在实际量产过程中,还会遇到诸如涉水托底、脏污遮挡、贴膜改色、喷漆、轻微追尾以及覆盖件材料变化等硬件问题,这些都会影响雷达探测精度与稳定性,因此需要在设计阶段提前进行可靠性验证与工程规避。
02
核心技术
一、硬件设计
该章节主要包括硬件架构、天线、高频板材、毫米波雷达芯片等关键设计技术。
毫米波雷达的一般架构如下:
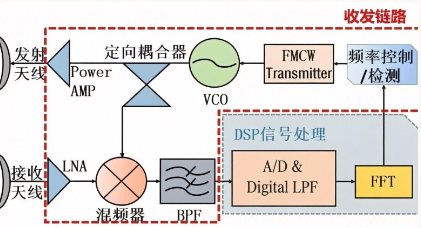
其中,射频链路包括很多组件,例如调制器、检波器、功率放大器(AMP)、低噪声放大器(LNA)、混频器、滤波器及压控振荡器(VCO)等等,实现毫米波信号的调制、发射、接收及解调功能。
二、软件设计
毫米波雷达的软件比较复杂,通常分为信号处理和数据处理两部分。
毫米波雷达一般的算法流程如下:
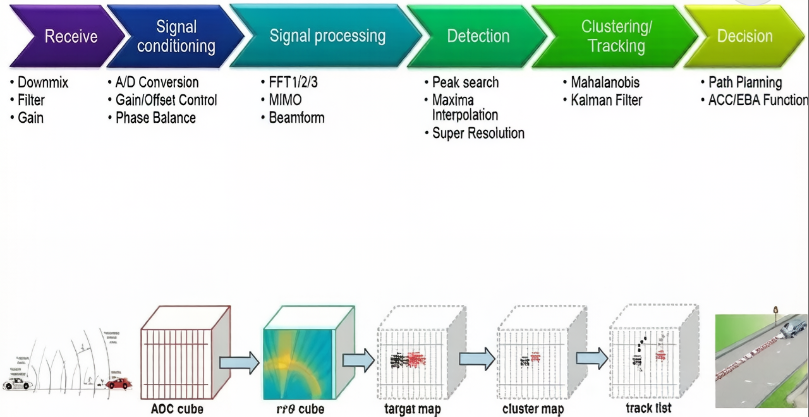
图片来源:NXP
主要包括:
- 距离 FFT:通过低维实数 FFT,获得目标的距离信息。
- 多普勒 FFT:通过高维复数 FFT,获得速度信息。
- 非相干累加:将接收通道的数据做求模累加,最后得到幅值矩阵。
- CFAR 目标检测:通过横虚警率计算出噪声阈值,从而区分目标和噪声。
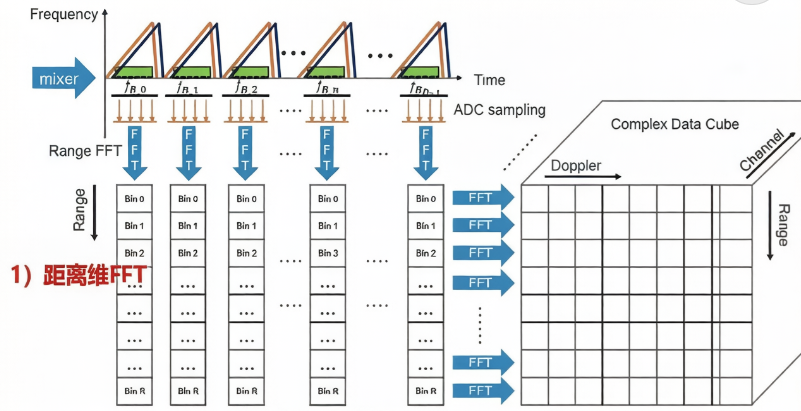
其中:
- 距离维:对于单个 Chirp 信号来说,信号包含了(距离/速度)信息,但以距离为主(由于时间非常短,忽略速度,或者后面增加补偿),可以通过 FFT 直接求出距离信息。
- 速度维:将距离微分成一个个距离单元。对于其中一个距离单元,我们以一个 Chirp 一个 Chirp 的时间轴来看,对该信号作 FFT 处理,即可求出其速度信息。
整体的数据对应关系:
对于信号处理,课程会根据 3D 毫米波雷达和 4D 毫米波雷达两种产品来分开介绍。
1)数据处理
数据处理是将点云处理为目标,包括聚类、跟踪、目标分类、融合、grid/freepace 等。
数据处理的核心功能是聚类、分类和跟踪。
- 聚类
DBSCAN 是一种常用的聚类算法,不过该算法对于相距较近的两个目标(例如汽车和其旁边的行人),经常出现异簇合并,以及大车出现同簇分裂。
一些新的聚类算法被提出,用于提高算法执行效率或者改善聚类效果,比如多帧联合聚类(ICP)、分阶段二次聚类,或者基于 Kd-tree 的加速聚类算法。
- 分类
聚类后,可以得到目标基本信息,比如目标位置(x,y,z)、点云数量、长度、宽度、高度、体积、投影面积、RCS、SNR 以及各种统计分布,如位置方差等。根据这些信息,可以对目标进行分类。
常见的分类方法有决策树模型、最近邻模型和支持向量机等。
分类之后可以针对特定类型的目标,优化处理算法。例如,针对客车和行人可以采用不同的跟踪和滤波算法,以提升雷达的检测和跟踪效果。
- 跟踪
目标跟踪算法主要包括航迹起始、跟踪滤波和数据关联等三大核心技术。
- 航迹起始:有逻辑法(滑窗法)、直观法、Hough 变换法。
- 跟踪滤波:采用卡尔曼滤波,例如 KF、EKF、UKF、CKF。
- 关联算法:有单目标采用 NN、PDA,多目标采用 JPDA、匈牙利匹配。
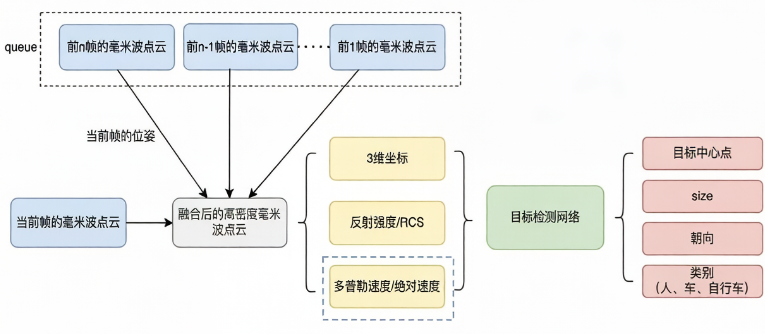
2)深度学习技术的应用
高性能毫米波雷达点云数量大幅增加(例如 4D 成像毫米波雷达),基于规则的传统算法处理能力有限,深度学习算法是未来趋势(尤其是当算法运行在域控制器上时)。
例如,百度 PointPillars 网络:
网络结构:
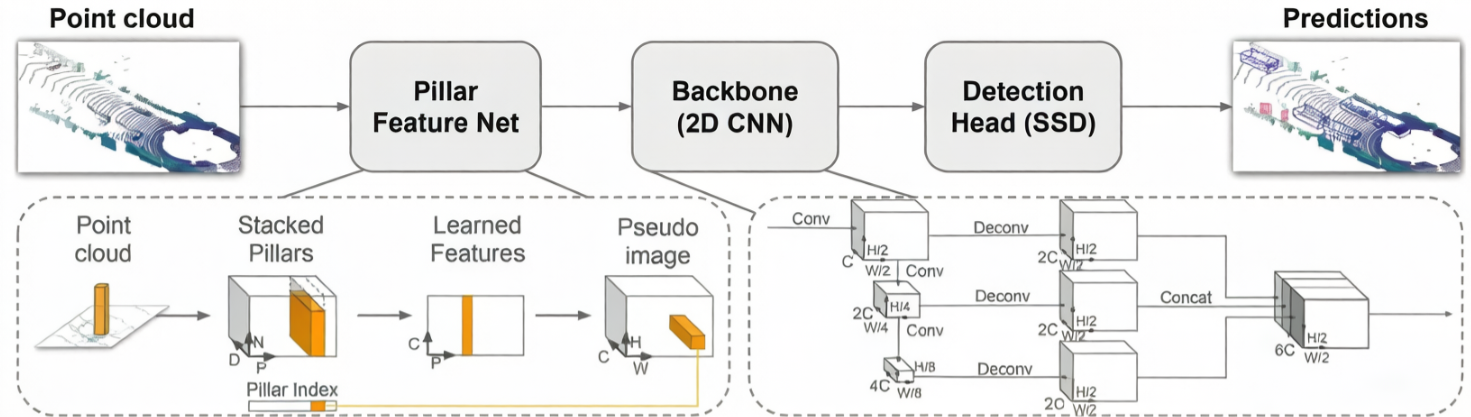
PointPillars 网络利用 pillars(垂直 columns)的方式将 4D 毫米波点云转化为稀疏伪图像,使用 2D 网络进行特征的学习,使用 SSD 检测头进行 bbox 的回归。
再比如,华盛顿大学的 CenterRadarNet:
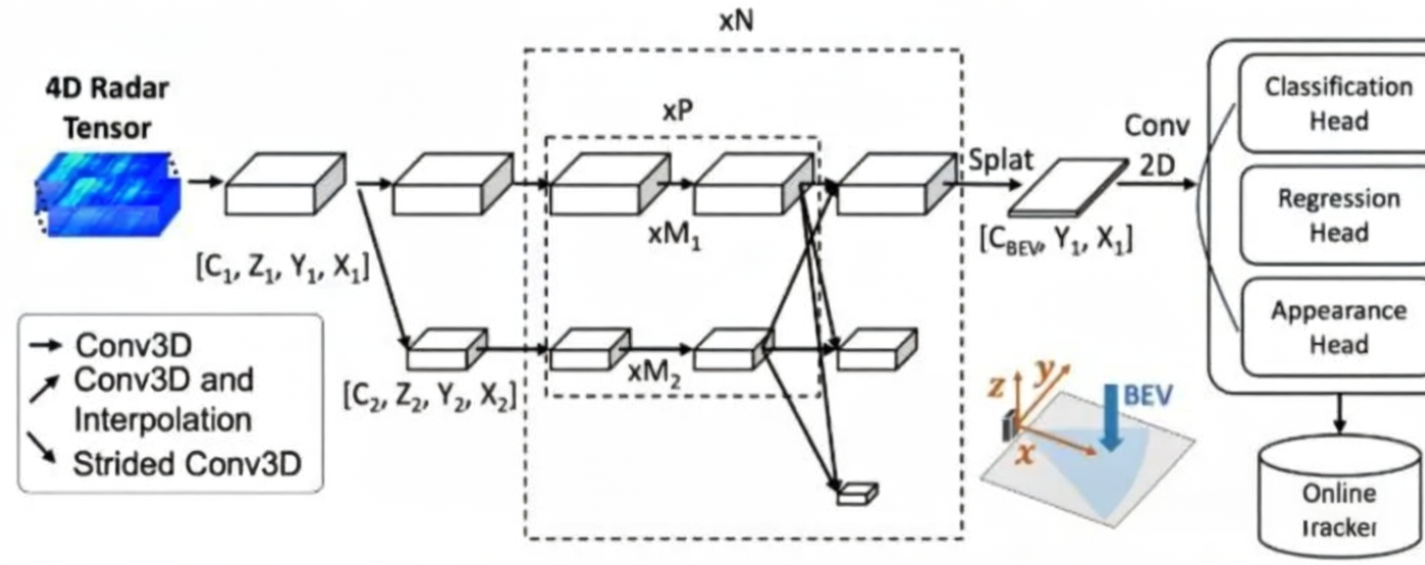
CenterRadarNet 是一个专为 3D 目标检测和跟踪而设计的综合框架,特别利用 4D FMCW 毫米波雷达张量作为其输入。
该架构由三个主要组件组成:用于特征提取的 Conv3D 主干,用于精确目标识别的专用目标检测和 appearance heads,以及在线跟踪器。
另外:NXP、Arbe、大陆、博世、安波福、高通等,都在研究使用深度学习技术,提升毫米波雷达的聚类、跟踪、分类、自定位、假目标滤波等功能性能。
三、热点技术
1)4D 成像技术
4D 成像毫米波雷达相对于一般 3D 毫米波雷达,性能有大幅提升。
4D 成像毫米波雷达与一般毫米波雷达的对比
1. 点云数量与感知能力
- 4D 成像毫米波雷达:每秒可输出 3 万点点云。它能勾勒出目标轮廓,更适合进行目标识别与分类,支持与摄像头做前融合,并且可容纳多目标,小目标不易漏检。
- 一般毫米波雷达:每秒仅输出 4000 点点云。它无法勾勒目标轮廓,点数量少导致无法做前融合;在同距同速下无法容纳多目标,容易漏检 100 米以上的并排车辆,且小目标容易漏检。
2. 方位角性能(水平方向)
- 分辨率:4D 雷达分辨率为1°,可区分前方 250 米处间隔 4.5 米以上的车辆;一般雷达分辨率为3~5°,无法识别 100 米以上并排行驶的两辆车。
- 精度:4D 雷达精度达0.1°,150 米处横向误差仅 26 厘米,车辆所在车道不会误判;一般雷达精度为0.3°,150 米处横向误差达到 0.8 米,容易导致车辆所在车道误判。
3. 俯仰角性能(垂直方向)
- 分辨率:4D 雷达具备1°的分辨率,可区分前方 65 米处 3 米高的横杆和下方的行人;一般雷达无俯仰角分辨率,无法分辨远处的横杆和下方的人或车辆。
- 精度:4D 雷达精度为0.1°,测量前方 65 米处物体高度误差为 11 厘米,可区分是轮胎还是井盖;一般雷达精度为1°,无法区分远处是轮胎还是井盖。
4. 物理特性与开发应用
- 尺寸:4D 雷达体积大(例如博世 FR5CU 尺寸为 110×143×30 mm);一般雷达尺寸小(例如博世 FR5CP 尺寸为 63×72×19 mm)。
- 开发难度:4D 雷达开发难度高,算法复杂且调试周期长;一般雷达开发难度低,算法成熟,适配时间短。
- 价格:4D 雷达价格区间在 1200~1800 元,相对较高;一般雷达价格在 300~500 元,相对较低。
4D 成像毫米波雷达有多种实现方案,例如多片级联、专用芯片、软件方案等等。 4D 成像雷达通常拥有较多的收发通道(从 100 多到 2000 多个虚拟通道)。目前主流产品是采用多片 MMIC 级联(例如 NXP、TI 等)或者专用芯片组方案(例如 Arbe、Uhnder 等)。
目前国内外几乎所有的毫米波厂商,都在布局 4D 成像毫米波雷达产品。
2)PMCW 技术
PMCW(Phase Modulated Continuous Wave,相位调制连续波),采用诸如二进制码等编码方式,对载波进行相位调制,通过发射、接收和处理,进而获取目标距离、速度以及角度信息。
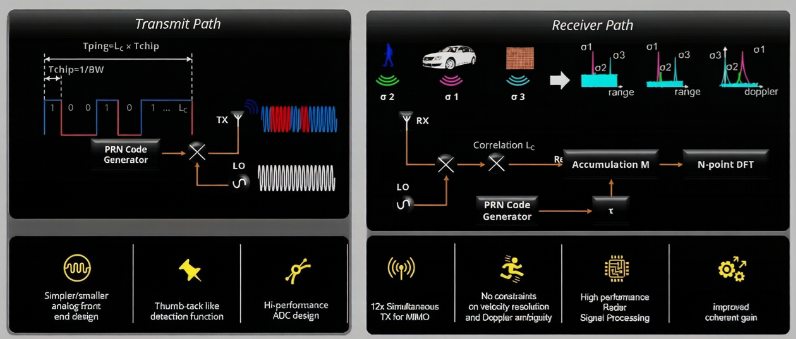
FMCW 和 PMCW 的方案对比:
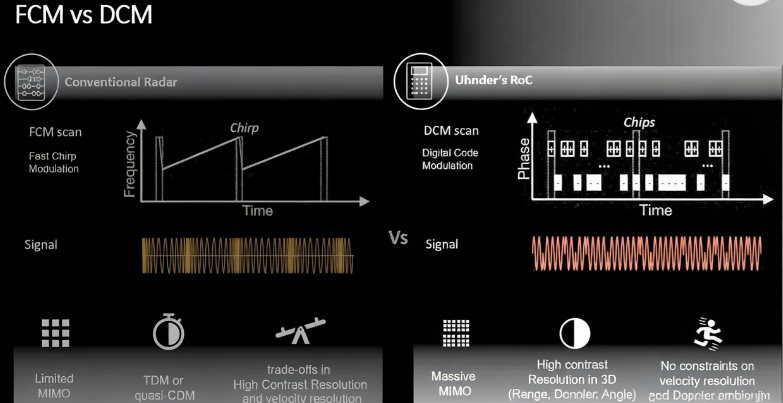
PMCW 可以实现更好的抗干扰性能和更高的分辨能力。
3)卫星毫米波雷达
毫米波雷达开始从传统的“Smart Sensor”,向“中央计算雷达”(或者卫星毫米波雷达)演进。
卫星毫米波雷达仅实现 RF 射频前端和部分前处理,然后将较原始数据通过高速总线(ETH 或者 SerDes)传输给域控制器,之后在域控中完成剩余的后处理。 中央计算雷达的主要优势:
- 性能更高。射频前端做更多针对性的优化,提升前端数据的质量,例如提升 ADC 采样率、信噪比和功率。同时,在域控中,可以使用性能更好、更复杂的算法(例如超分辨和深度学习),实现之前在雷达本体内无法实现的功能,同时运行时间更短,帧率更高。
- 系统成本更低。由于雷达头仅传输原始数据,处理器和外围器件可以被剪裁,因此成本可以降低。雷达头可以直接通过 SerDes 线缆和以太网线缆供电(PoDL),减少电缆和连接器成本。
- 融合性能更好。可以采用类似视觉的“BEV”感知架构,将多个雷达原始信号统一处理,消除目标在不同雷达 FOV 边缘时的跟踪中断,降低误报和漏报。同时,能够更方便的将雷达原始信号和视觉图像、激光雷达点云进行前融合,提升整体感知性能。在端到端算法架构下,通过使用更原始信号的毫米波雷达信号(更少的信息损失),可能会带来更好的综合感知性能。
- 可维护性和可扩展性更高。毫米波雷达的主要处理软件部署在域控中,使得雷达算法的更新可以通过 OTA 更容易的实现,提高了可维护性和功能可扩展性。同时,在保证相同性能的情况下,由于域控端算法能力的提升,可以减小对于射频前端的需求,例如可以减少天线阵列的面积,从而减小雷达头体积,降低功耗,进而使得布置更为友好。
- 系统调试更容易。域控制器会直接接收毫米波雷达原始数据,开发团队获取这些数据将非常容易,例如自动传到云端或者备份在本地存储器中,从而大大提升毫米波雷达的开发和故障排查效率。
中央计算雷达的 MMIC 对于射频前端性能要求更高,而对于处理器的性能要求降低。目前 TI 和 NXP 均已经推出中央计算雷达的芯片解决方案:
例如 TI 的 AWR2544:
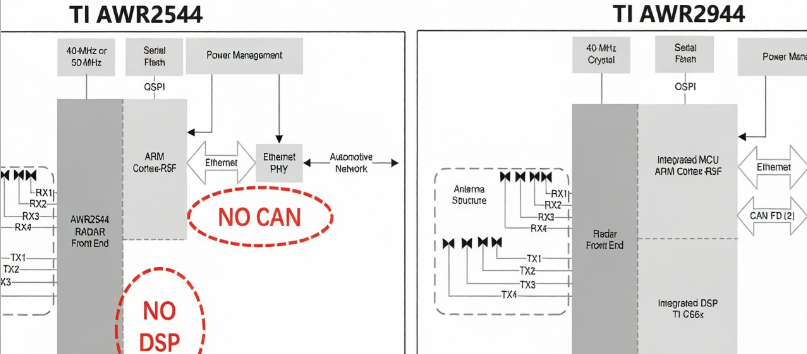
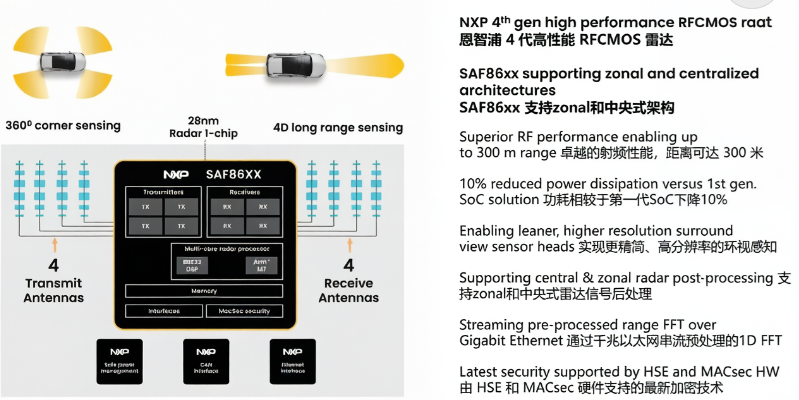
NXP 的 SAF86XX:
4)MMIC 的演进
毫米波雷达芯片工艺经历了由最早的砷化镓(GaAs)工艺,到锗硅(SiGe)工艺,再到 CMOS 工艺的演进路径,在性能提升同时,推动车载毫米波雷达系统成本的持续下行。
- 早期,车载毫米波雷达芯片主要采用砷化镓(GaAs) 工艺,一个毫米波雷达中需要至少配备 7 到 8 颗以上的 RF 芯片。同时,由于工作在 24GHz 频段,毫米波雷达体积较大、价格昂贵。
- 2000 年初,锗硅(SiGe)工艺的发展,大大提高了毫米波雷达芯片的集成度,一个毫米波雷达只需要 2 到 5 颗 MMICs、1 到 2 颗 BBICs,成本下探到千元级别。
- 2017 年,TI 推出了基于 CMOS 工艺的高集成度 77GHz 毫米波雷达芯片,将前端 MMIC RF、DSP 和 MCU 三个模块集成在一个毫米波雷达 SOC 芯片上,显著降低了毫米波雷达成本,大幅拉低了车载毫米波雷达的硬件开发难度。
(1)GaAs 工艺时代(1990-2007)
2007 年之前,射频部分无法使用硅材料制做,主要采用砷化镓(GaAs)。砷化镓工艺的材料成本和制造成本都比较高,对于生产线的要求也很高。同时,采用 GaAs 工艺制作的产品集成度也很低,成本非常高。
例如,用在奔驰汽车上的 ARS100(第一款商用雷达)。
(2)SiGe 工艺时代(2007-2017)
从 2009 年开始,SiGe 工艺逐渐代替 GaAs 工艺。SiGe 拥有硅工艺的集成度、良率和成本优势,使得前端射频芯片的集成度大幅提升。一个毫米波雷达只需要少量射频前端芯片,毫米波雷达系统成本大幅降低。
例如,大陆 ARS4-B,采用了 1 片 MR2001Tx,1 片 MR2001Rx 和 1 片 MR2001VC。
(3)CMOS 工艺时代(2017 年至今)
最初 CMOS 工艺制程较低,不能工作在高频中。例如以 180nm 制程为例,SiGe 可以工作在 180GHz 以上,而 CMOS 工作频率只能达到 40GHz。到了 2010 年,CMOS 工艺进步到 40nm,使得 CMOS 用于 77GHz 毫米波雷达成为可能。
CMOS 工艺处理速度更快,相对成本更低:
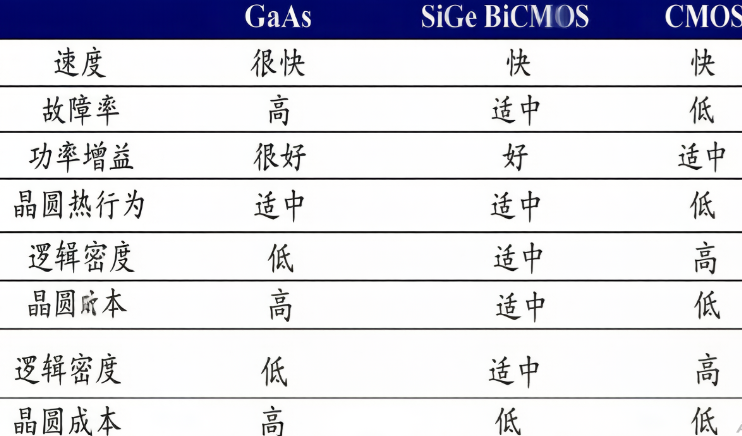
来源:MEMS
CMOS 的集成度能够进一步提升,一个毫米波雷达只需要 1 颗 MMIC 芯片,雷达整体系统成本进一步下降。
例如,BOSCH 的 MRR5,仅采用 1 片英飞凌的 SiGe BICMOS MMIC:RXS8160PL。
(4)FD-SOI 工艺
FD-SOI(Fully Depleted Silicon-on-Insulator,全耗尽绝缘体上硅)是一种先进的半导体制造工艺,它结合了平面晶体管结构和全耗尽工作特性。这种技术依赖于一种独特的基板,该基板具有超薄的顶层硅层和埋氧层(BOx),从而实现了更好的栅极控制和更低的漏电流。
与传统的 CMOS 工艺相比,FD-SOI 在 28nm 及以下节点可以实现更高的性能和更低的功耗:
- 性能高:FD-SOI 衬底提供了更高的跨导(Gm)和截止频率(Ft/Fmax),从而提高了晶体管的性能。FD-SOI 晶体管具有较低的栅极电容和电阻,从而降低了噪声。同时,无掺杂硅通道提供了更好的线性度,适用于高功率应用。
- 可靠性高:FD-SOI 技术可以将软错误率降低到普通 CMOS 工艺的 1/100,从而提高系统的可靠性和稳定性。
- 功耗低:通过薄埋氧层和反向体偏置技术,FD-SOI 衬底可以显著降低漏电流,实现更低的功耗。
- 集成度高、成本低:FD-SOI 技术可以将数字、模拟和射频模块集成在一个芯片上,降低集成难度和设计复杂性,减小系统尺寸并降低成本。
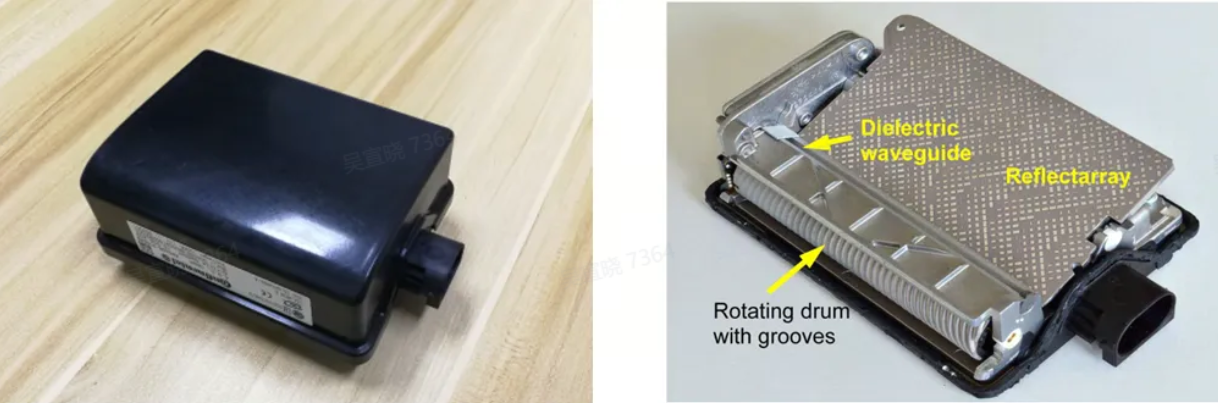
5)封装上装载
该技术在不同芯片厂的叫法略有不同,例如:
- TI 称为:Launch On Package,LoP
- NXP 称为:Launcher in Package,LiP
- 加特兰称为:Radiator on Package,ROP
封装上装载技术将信号从封装辐射元件直接传输到 3D 天线,从而实现高效的电磁信号传输,搭配 3D 波导天线,可以提供更出色检测性能。
封装上装载技术具有多个优势,包括:
1)LoP 可以实现较低的转换功率损耗,SNR 性能更好。
2)热管理更容易:采用 LoP 技术时,发射元件位于封装的底部,因此可在顶部放置散热器来实现热管理。
3)辐射隔离性能更好:采用 LoP 技术时,发射元件位于封装的底部,因此可以降低 EMI/EMC 问题,因为 3D 天线放置在 PCB 的一侧,毫米波集成芯片位于 PCB 的另一侧,从而增强从 MMIC 到 3D 天线的隔离。
4)成本更低:微带贴片天线需要高质量、低损耗的昂贵 PCB 材料。然而,对于 LoP 3D 天线,PCB 可以使用较为便宜的基板制成。因此,LoP 技术可以在传感器级别带来成本优势,节省 PCB 成本。同时,由于无需微孔以及减少 PCB 接地层的潜在数量,可以进一步减少 PCB 总层数,节省 PCB 成本。
5)灵活性更高:采用外部 3D 天线的 LoP 技术时,可在多个不同的毫米波雷达之间,实现复用 PCB 设计,仅通过更换波导天线,就可以实现不同视场角的毫米波雷达。具有较少 PCB 型号的雷达传感器设计,可以实现单个 PCB 更高的产量,从而减少物料管理费用,并降低成本。此外,由于采用非优质射频基板,市场上有更多的 PCB 供应商可供选择。
03
结语
毫米波雷达正处于从“传统传感器”向“高性能中央计算感知单元”快速演进的关键阶段。从早期机械扫描到如今的4D成像、PMCW、多片级联,再到卫星式中央计算雷达,其在硬件集成度、信号处理算法和多传感器融合上的突破令人振奋。
然而,技术复杂度也随之大幅提升:多径干扰、点云处理、深度学习应用、域控制器融合等,都需要更多开放的技术交流与生态协作。开放接口规范、标准化点云数据集、高质量算法基准,以及真实场景验证工具,将成为推动行业高效发展的关键。
04
SuperRadar社区介绍
SuperRadar 社区是由深圳承泰科技股份有限公司发起并长期支持的开放技术社区,聚焦毫米波雷达、空间感知、点云处理、多传感器融合、机器人、智能交通、工业安全、低空经济等方向。我们致力于通过开放技术基座、开发者工具、接口规范、Demo、场景实践与生态协作,降低感知技术开发和应用门槛,推动更多创新者参与感知系统建设。
欢迎各位开发者、研究者和行业伙伴加入 SuperRadar 开源社区,一起交流毫米波雷达前沿技术、分享融合方案实践、共建开源工具与数据集!
(社区小助手:superradar01)
