

📌 本文完整内容、代码示例和详细文档都在我的 GitHub 仓库
- 📄 文章地址: LLM 推理分离架构
- 📦 Repo 总地址: david-share
⭐ 欢迎 Star,你的支持是我持续分享的动力!
LLM 推理分离架构:六层技术栈、生态全景与功能验证
作者:魏新宇 (Xinyu Wei)
日期:2026-04-20(功能验证)| 2026-05-03(架构分析)
硬件:Azure NC80adis_H100_v5(2× NVIDIA H100 NVL 95830 MiB,NV12 NVLink)
技术栈:SGLang 0.5.10.post1 + NVIDIA Dynamo 1.0.1 + NIXL 1.0.1 + NATS v2.11.3 + etcd v3.5.21
核心结论
第一部分 — 架构:推理分离技术栈有 6 层(KV 数据 → KV 传输 → KV 存储 → PD 调度 → 请求路由 → 应用感知),6 大实现(Dynamo、SGLang、Mooncake、vLLM、DeepSeek、大厂自研)。它们不是竞争关系 — 生产部署是从不同层选组件拼装。
PD 分离的价值不止于尾部延迟:(1) P99 ITL 可预测、可承诺 SLO,(2) Prefill 和 Decode 池独立扩缩容(加 Decode GPU 不动 Prefill),(3) 可混用不同 GPU SKU(算力型做 Prefill,大显存型做 Decode)。
第二部分 — 功能验证:我们在 2×H100 NVL 上用 Qwen3-8B 和 Qwen2.5-32B 对 NVIDIA Dynamo PD 分离做了功能验证(functional validation),而非生产级 benchmark。2 卡单节点环境可以验证行为和方向性趋势,但绝对数值不应用于容量规划或跨平台对比。
- TP=2:吞吐量和 TTFT 最优。同节点 NVLink 首选。
- Prefix Cache:ROI 最高 — 41% TTFT 下降,零配置。
- PD 分离:仅尾部延迟胜出 — P99 ITL 8B -52%、32B -85%。优势随模型增大。
- Chunked Prefill:不可关闭 — 关闭后 TTFT 爆炸 4.7×。
为什么需要推理分离
Coding agent 正在大规模写生产代码:Stripe 每周 1300+ PRs、Ramp 30% 合并 PRs 来自 agent、Spotify 每月 650+ agent 生成的 PRs。这些工作流背后的推理栈承受着巨大的 KV cache 压力。
NVIDIA 分析了 Claude Code session,发现了 Write-Once-Read-Many (WORM) 访问模式:第一次 API 调用将对话前缀写入 KV cache 后,后续每次调用命中 85-97% cache。Agent 团队更进一步 — 4 个 Opus 队友的聚合 cache 命中率达 97.2%,读写比达 11.7×。
但并非所有 KV block 价值相同:
| Block 类型 | 复用模式 | 保留价值 |
|---|---|---|
| System prompt + tool 定义 | 每轮复用 | 最高 |
| 对话历史 | 后续轮次,递增 | 高 |
思考/推理 token(<think>) | 循环关闭后不再复用(占输出 ~40%) | 接近零 |
| 子 Agent KV | 1-3 轮后 Agent 死亡 | 接近零 |
默认 LRU 驱逐对所有 block 一视同仁。2-30 秒的 tool call 等待可能导致 agent 的整个前缀被驱逐,恢复时必须全量重算。传统推理引擎解决了 kernel 调度 — Dynamo 解决的是 agent 感知的缓存管理。
来源:Full-Stack Optimizations for Agentic Inference with NVIDIA Dynamo — Figure 1、KV 复用表、Claude Code 分析。
架构:六层技术栈
LLM 推理分离不是一项单一技术 — 而是 6 层技术栈,每层解决不同问题:
┌─────────────────────────────────────────────────────┐
│ L6: 应用感知层 │
│ Agent hints / priority / TTL / session lifecycle │
├─────────────────────────────────────────────────────┤
│ L5: 请求路由层 │
│ KV-aware routing / Flash Indexer / 负载均衡 │
├─────────────────────────────────────────────────────┤
│ L4: PD 调度层 │
│ 哪个 GPU 做 Prefill、哪个做 Decode、怎么分配请求 │
├─────────────────────────────────────────────────────┤
│ L3: KV 存储与共享层 │
│ 多层存储(GPU→CPU→SSD→远程) / 跨 worker 共享 │
├─────────────────────────────────────────────────────┤
│ L2: KV 传输层 │
│ GPU 间 KV 数据的物理搬运(RDMA/NVLink/TCP) │
├─────────────────────────────────────────────────────┤
│ L1: KV 数据层 │
│ Transformer 每层每 token 的 Key+Value 向量 │
└─────────────────────────────────────────────────────┘
一个请求如何流经全部 6 层:
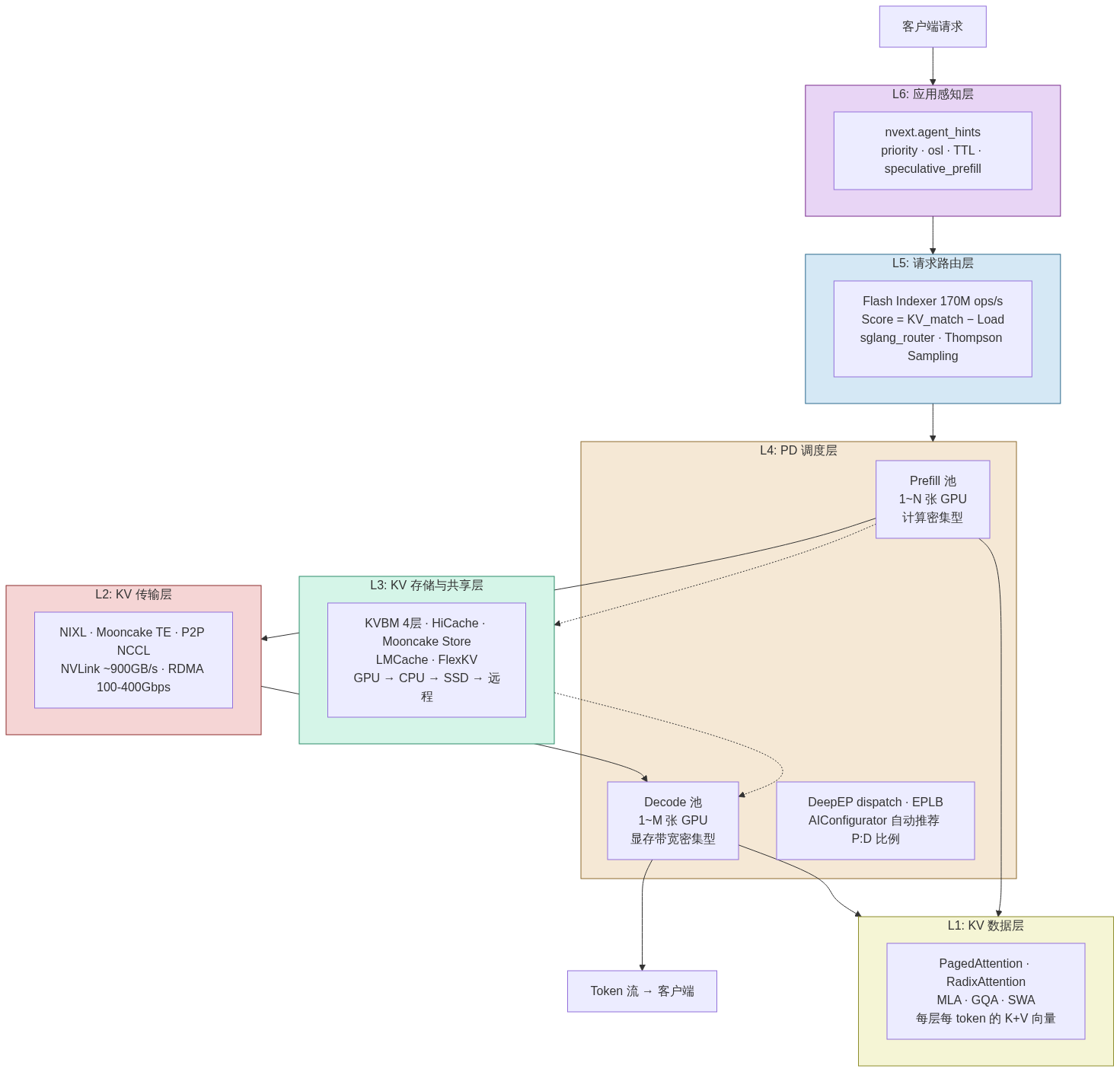
| 层 | 解决什么问题 | 关键技术 |
|---|---|---|
| L1: KV 数据 | KV Cache 是什么、多大、怎么算 | PagedAttention、RadixAttention、MLA、GQA、SWA |
| L2: KV 传输 | Prefill GPU 的 KV 怎么搬到 Decode GPU | NIXL、Mooncake Transfer Engine、P2P NCCL |
| L3: KV 存储 | KV 存哪里、多层级、跨 worker 共享 | KVBM(4层)、HiCache、Mooncake Store、LMCache、FlexKV |
| L4: PD 调度 | 哪个 GPU 做 P、哪个做 D | --disaggregation-mode、Dynamo Frontend、DeepEP(MoE expert dispatch)、EPLB |
| L5: 请求路由 | 新请求发给谁(考虑 KV 缓存+负载) | Flash Indexer(170M ops/s)、sglang_router、Thompson Sampling |
| L6: 应用感知 | 推理系统理解 Agent 生命周期 | nvext.agent_hints、cache_control TTL、<think> 检测 |
六大实现及覆盖层级
这些实现不是互斥竞争 — 它们在不同层运作,可以组合使用:
L1 L2 L3 L4 L5 L6
数据 传输 存储 调度 路由 应用
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━
Dynamo · ██ ██ ██ ██ ██ ← L2-L6 全栈
SGLang · ██ ██ ██ ██ · ← L2-L5
Mooncake · ██ ██ · · · ← L2-L3(基础设施层)
vLLM · ██ ██ ██ · · ← L2-L4(通过 Connector 插件)
DeepSeek · ⚠️ ██ ██ ██ · ← L2-L5(L2 KV 传输未开源)
大厂自研 · ██ ██ ██ ██ ██ ← 各自闭环
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━
生产部署 = 每层选一个组件拼装:
PagedAttention + NIXL + KVBM + Dynamo Frontend + Flash Indexer + agent_hintsRadixAttention + Mooncake TE + HiCache + SGLang disagg + sglang_routerPagedAttention + NixlConnector + LMCache + vLLM disagg + llm-dMLA + 内部 KV 传输 + 内部存储 + PD+EPLB+TBO + 内部路由
L3 KV 存储不只是 PD 分离才需要
常见误解:KV 存储/共享(L3)只有 PD 分离才需要。实际上 L3 服务于 5 个独立场景:
| 场景 | 需要 PD? | 需要 L3? | 原因 |
|---|---|---|---|
| Agent 工具调用(等 2-30 秒) | ❌ | ✅ | KV 被 LRU 驱逐 → 卸载到 CPU/SSD → 回来时 prefetch |
| 多 Worker 共享前缀 | ❌ | ✅ | 4 个 worker 重算同一 system prompt → 共享存储算一次读 4 次 |
| 长上下文溢出 | ❌ | ✅ | 128K token 的 KV 超出 GPU 显存 → 冷 block 卸载 |
| PD 分离 | ✅ | ✅ | Prefill 写 KV 到共享层 → Decode 读取 |
| 弹性扩缩容 | ❌ | ✅ | 新 worker 从共享存储加载已有 session 的 KV |
KV Cache 在 GPU 上的分布
KV Cache 的位置取决于并行策略:
| 策略 | KV 位置 | PD 传输复杂度 |
|---|---|---|
| 单卡 | 全在 1 张 GPU | 简单:1 对 1 |
| TP=8 | 分布在 8 张 GPU(按 attention head 切分) | 8 对 8:每张 Prefill GPU 传给对应 Decode GPU |
| TP=8 + DP=2 | 16 张 GPU | 16 对 16 |
| EP=16(MoE) | 16 张 GPU,每卡不同 expert | 不规则:每层每 token KV 位置不同 |
对于采用 hybrid attention(SWA + Global Attention)的万亿参数 MoE 模型,PD 传输尤其复杂 — 不同层产生不同大小的 KV block。
生产环境的 P:D 比例 — 不是 1:1
常见问题:Prefill GPU 和 Decode GPU 各要多少?答案不是 1:1 — 因为 Prefill 和 Decode 的计算特性完全不同:
Prefill: 一次性处理所有 input tokens → 计算密集 → 几十~几百 ms 完成
Decode: 每次只生成 1 个 token → 显存带宽密集 → 持续数秒到数十秒
时间线(1P:1D):
Prefill GPU: ██░░░░░░░░░░░░░░░░░░ (忙 200ms,空闲 39.8s 等下一个请求)
Decode GPU: ░░████████████████████ (持续忙 40s)
→ Prefill GPU 99% 空闲,浪费。
生产部署使用 xP:yD 比例,由 ISL/OSL 和 SLO 目标决定:
| 来源 | 模型 | P:D 比例(节点) | P:D 比例(GPU) | ISL | 说明 |
|---|---|---|---|---|---|
| SGLang Blog(2025-05) | DeepSeek-V3 | 4P : 9D 节点 | 32:72 GPU ≈ 1:2.25 | 2K | 12 节点 × 8 H100,开源复现 |
| DeepSeek 官方 | DeepSeek-V3 | 未公开 | 18 decode 节点 | — | 官方 profile data 已公开 |
| AIConfigurator | 任意模型 | 自动推荐 | 按 ISL/OSL/SLO 变化 | 任意 | 秒级搜索数万种配置 |
比例取决于 ISL/OSL:
- 长输入短输出(摘要)→ Prefill 重 → 比例接近 1:1 甚至 2:1
- 短输入长输出(Agent/聊天)→ Decode 重 → 比例接近 1:2 ~ 1:4(估算范围;仅 1:2.25 经过实测验证)
- 正确做法:用 AIConfigurator 自动推荐,不要手动猜
AIConfigurator(GitHub,Blog)自动推荐最优 P:D 比例:
aiconfigurator cli default \
--model-path nvidia/Qwen3-32B-NVFP4 \
--total-gpus 64 --system b200_sxm \
--isl 15000 --osl 500 \
--ttft 1000 --tpot 15 \
--backend auto # 同时对比 TRT-LLM、SGLang、vLLM
它把推理分解为各个操作,在目标 GPU 上分别测量,然后重组估算端到端性能 — 秒级搜索数万种配置,不占用 GPU。Mooncake 和阿里已贡献了 SGLang 和 vLLM 后端支持。
来源:Removing the Guesswork from Disaggregated Serving — NVIDIA Developer Blog, 2026-03
PD 分离工作原理(我们的实际部署)
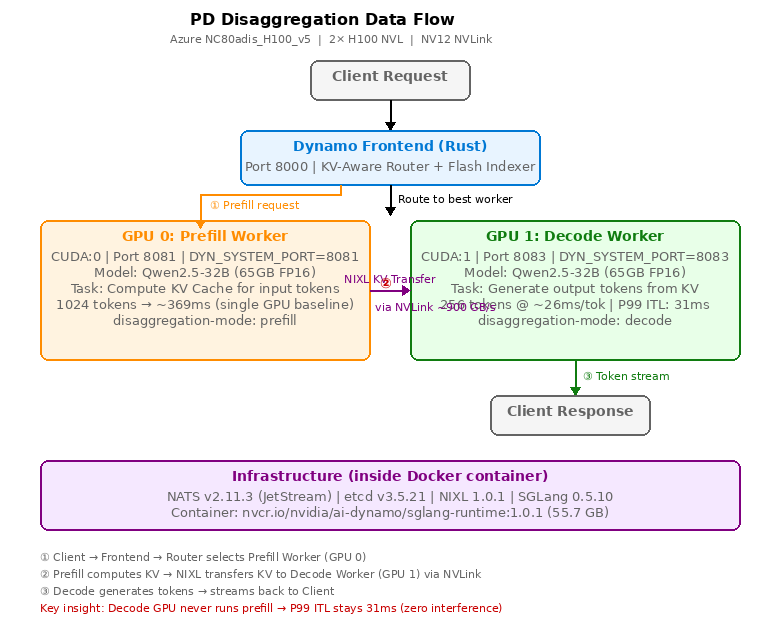
上图展示了我们的实际部署。请求流程:
- Client → Frontend:Dynamo 的 Rust Frontend(端口 8000)接收请求。KV 感知路由器查询 Flash Indexer 选择最优 worker。
- Prefill Worker (GPU 0):为输入 token 计算 KV cache(1024 tokens → 32B 约 369ms)。使用
--disaggregation-mode prefill,CUDA:0。 - NIXL KV 传输:计算好的 KV cache 通过 NIXL 经 NVLink(~900 GB/s 双向)从 GPU 0 传输到 GPU 1。这增加了 TTFT 延迟,但实现了物理隔离。
- Decode Worker (GPU 1):从传输的 KV cache 生成输出 token(~26ms/token)。使用
--disaggregation-mode decode,CUDA:1。这张 GPU 永远不执行 prefill kernel — 所以 P99 ITL 保持 31ms,不受新请求负载影响。
条件性分离(Conditional Disaggregation):VllmWorker 不会把所有请求都发给远程 PrefillWorker。max_local_prefill_length 参数控制阈值 — token 数 ≤ 阈值的请求在本地 prefill,超过阈值才派发到专用 PrefillWorker。这样可以避免短 prompt 承受不必要的 NIXL 传输开销。(来源:GTC Tutorial S73042 P38)
# 官方 disagg 配置(来自 GTC Tutorial S73042)
VllmWorker:
conditional-disagg: true # 启用条件性路由
max_local_prefill_length: 10 # ≤10 tokens: 本地 prefill; >10: 远程
remote_prefill: true
kv-transfer-config: '{"kv_connector":"DynamoNixlConnector"}'
| 组件 | 作用 | 为什么需要 | 我们的版本 |
|---|---|---|---|
| Dynamo Frontend | Rust HTTP 服务器。接收所有客户端请求,处理 nvext.agent_hints,通过 KV 感知路由器 + Flash Indexer 把请求分发到最优 worker。 | 没有它,客户端就得知道哪张 GPU 做 prefill、哪张做 decode。Frontend 抽象了这些—客户端只管发到 8000 端口。 | Dynamo 1.0.1 |
| NATS | 轻量级发布-订阅消息总线。各组件通过 NATS 宣告自己的状态(“我是 prefill worker,我已就绪”),Frontend 订阅这些消息来发现 worker。 | Worker 和 Frontend 需要动态发现彼此,NATS 提供实时服务发现,不需硬编码 IP。 | v2.11.3 (JetStream) |
| etcd | 分布式键值存储。存储 worker 元数据(哪些 worker 存在、它们的角色、端点)和 Dynamo 配置。Worker 启动时自动注册到 etcd。 | 路由器需要一个一致的、共享的 worker 注册表。etcd 在多节点场景提供这个能力。单节点可用 --discovery-backend file 替代。 | v3.5.21 |
| NIXL | 数据传输库。在 GPU 之间(或 GPU 和 CPU/存储之间)移动 KV cache block。底层用 UCX 自动选择最优传输(NVLink/IB RDMA/RoCE/TCP)。 | Prefill 在 GPU 0 算完 KV 后,KV 数据必须物理移动到 GPU 1 才能开始 decode。NIXL 以最小开销完成这个传输。 | nixl 1.0.1 |
| SGLang Workers | 实际的推理引擎。每个 worker 加载完整模型,通过 --disaggregation-mode 指定做 prefill 还是 decode。管理 KV cache、attention 计算和 token 生成。 | 做数学计算的“大脑”。Dynamo 负责编排,SGLang 负责实际 GPU 计算。 | SGLang 0.5.10 |
关于 KVBM:Dynamo 的 KV Block Manager (KVBM) — 支持四层 KV 存储(GPU → CPU → NVMe → 远程)— 目前仅在 TensorRT-LLM 后端可用(
--kv-transfer-config kvbm)。SGLang 后端在 PD 模式中使用 NIXL 进行 KV 传输。KVBM + SGLang 在 Dynamo 特性矩阵 中标记为 🚧(开发中)。
PD 分离的网络前提
NIXL(KV 传输库)使用 UCX 作为默认后端,自动选择最优传输方式:
| 部署场景 | KV 传输路径 | 网络要求 | 性能 |
|---|---|---|---|
| 同节点(我们的场景) | NVLink via UCX CUDA IPC | 无需网络 | ~900 GB/s (NVL12) |
| 跨节点生产 | RDMA via UCX verbs | InfiniBand 或 RoCE v2 | 100-400 Gbps,零拷贝 |
| AWS 跨节点 | EFA via UCX | AWS Elastic Fabric Adapter | AWS 原生 RDMA |
| TCP 回退 | TCP via UCX | 普通以太网 | 能跑但不适合生产 — 非零拷贝,延迟高 |
⚠️ 重要说明:本 Repo 在单节点(2×H100 NVL)上验证 PD 分离,KV 传输走 NVLink — 不涉及网络。 生产环境多节点 PD 部署必须使用 RDMA 网络(InfiniBand、RoCE v2 或 AWS EFA),否则 KV 传输延迟会抵消 PD 的延迟优势。基于 TCP 的 KV 传输技术上可通过 UCX 实现,但额外的 GPU→CPU→TCP→CPU→GPU 拷贝开销会抵消 PD 的延迟收益。所有 NVIDIA Dynamo 多节点 recipe 均假定 RDMA 网络。
来源:NIXL Blog — "supports AWS with EFA networking... Azure with RDMA networking";NIXL GitHub — UCX 默认后端,
--with-verbs(IB/RoCE)。
KV 传输栈:数据实际怎么搞
Dynamo PD 分离
│ Prefill worker 算完 KV cache,需要发给 Decode worker
▼
NIXL (NVIDIA Inference Xfer Library — NVIDIA 推理传输库)
│ 统一数据传输 API — 抽象了内存类型和传输方式
│ 来源:https://github.com/ai-dynamo/nixl
▼
UCX (Unified Communication X — 统一通信框架) [默认后端]
│ 通信框架 — 自动选择硬件最优传输方式
│ 来源:https://github.com/openucx/ucx
▼
缩写词表:
| 缩写 | 全称 | 是什么 |
|---|---|---|
| NIXL | NVIDIA Inference Xfer (Transfer) Library | KV cache 在 GPU/存储之间的数据传输库 |
| UCX | Unified Communication X | 底层通信框架,自动选择最优传输方式 |
| NVLink | NVIDIA NVLink | 同节点内 GPU 间高带宽互联 |
| IB | InfiniBand | 跨节点高性能网络,支持 RDMA |
| RDMA | Remote Direct Memory Access(远程直接内存访问) | 零拷贝数据传输 — GPU 直接读写远程内存,不经 CPU |
| RoCE | RDMA over Converged Ethernet | 在无损以太网上跑 RDMA 协议 |
| EFA | Elastic Fabric Adapter | AWS 原生 RDMA 网络(EC2 实例用) |
| KVBM | KV Block Manager | Dynamo 的四层 KV 存储管理器(GPU→CPU→NVMe→远程) |
| NATS | (非缩写) | 轻量消息总线,Dynamo 服务发现用 (nats.io) |
| etcd | (来自 "/etc distributed",非缩写) | 分布式键值存储,worker 注册和配置用 |
什么时候用(和不用)PD 分离
⚠️ 诚实评估:我们的 2×H100 NVL 环境是一个 概念验证,验证 PD 分离能端到端跑通。这不是生产代表性部署。在单节点 NVLink 环境下,TP 在每个平均指标上都严格优于 PD。PD 的真正价值在于多节点部署(16+ GPU 跨 2+ 台机器)+ RDMA 网络,prefill 和 decode 池可以独立扩缩容。
基于实测数据 + Dynamo 设计意图:
| 场景 | 用 PD? | 原因 |
|---|---|---|
| 小模型(8B-13B)+ 单节点 NVLink | 不用 | TP 严格更好。Prefill 不是瓶颈。 |
| 中型模型(30B)+ 2 卡 NVLink | 不用 | PD 赢 P99 ITL 85%,但输吐量 14%。TP + Chunked Prefill 是更好的权衡。 |
| 单节点 8 卡(如 8×H100 NVLink) | 不用 | TP=8 已经最小化 prefill 时间。4P4D 浪费一半 GPU。Chunked Prefill 用零成本解决 80% 的 ITL 问题。 |
| 大模型(70B+)+ 多节点 + RDMA | 用 | Prefill 计算密集,跨节点 KV 通过 IB/RoCE 传输,独立池扩缩容降低成本。 |
| 严格 P99 ITL SLO(< 10ms)+ 多节点 | 用 | PD 防止集群中 prefill 抢占 decode。 |
| Agent 场景 + tool call(2-30 秒间隔) | 用 | PD + KV cache 钉住防止 tool call 间隔期驱逐。 |
| 成本敏感,追求最大吐量/美元 | 不用 | TP 以更简单架构给出相同或更好吐量。 |
Prefill 时间规则:如果单卡 prefill 你的典型输入长度 < 30ms(我们 8B 在 1024 token),PD 增加开销而无收益。在 ~370ms(我们 32B 在 1024 token)时,你处于交叉点 — 但仅限多节点场景(节点间没有 NVLink)。单节点有 NVLink 时,始终优先 TP + Chunked Prefill 而非 PD。
第三种方案:Chunked Prefill
PD 分离通过物理隔离(不同 GPU)解决 prefill-decode 互相干扰。但有更便宜的替代方案:Chunked Prefill,SGLang 默认开启。
问题
GPU 一次只能跑一个 kernel。kernel 启动后必须跑完,不能暂停、不能抢占。如果 32K token 的 prefill 作为一个 kernel 启动,耗时 ~2 秒。这 2 秒内所有其他请求的 decode 被阻塞。
解法
把 32K prefill 切成多个 chunk(如每 chunk 1024 tokens)。每个 chunk 是一次独立的 kernel launch。两次 kernel 之间,调度器可以插入其他请求:
不切碎:
kernel: Attention(32K tokens) → 2000ms,其他请求干等
切碎(chunk=1024):
kernel 1: Attention(1024 tokens) → 60ms
kernel 2: Attention(1024 tokens + 新请求) → 62ms
kernel 3: Attention(1024 tokens + decode batch) → 63ms
...(共 32 个 kernel,其他请求穿插执行)
原理和操作系统的时间片轮转一样:GPU 不能多任务,但把一个长任务切成多个短任务后,调度器在每个短任务之间都有决策机会。
KV Cache 正确性
Chunked prefill 产生的 KV Cache 与完整 prefill 数学上完全等价。每个 token 的 K 和 V 只取决于该 token 本身 + 前面所有 token + 模型权重。分几次算和一次算,结果一样。Chunk 2 从缓存中读取 chunk 1 已存好的 KV(PagedAttention 支持非连续读取),看到的上下文完全相同。
Chunked Prefill vs PD 分离
| Chunked Prefill | PD 分离 | |
|---|---|---|
| 原理 | 一个 GPU 上时间片切分 | 不同 GPU 物理隔离 |
| ITL 稳定性 | 好(无长时间卡顿) | 最好(零干扰) |
| 额外硬件 | 不需要 | 需要额外 GPU + NATS/etcd/NIXL |
| TTFT 影响 | 略升(被切碎) | 可能升(KV 传输 + 排队) |
| 配置难度 | 零(SGLang 默认开启) | 复杂部署 |
Chunked Prefill 是"穷人的 PD" — 用 0% 的成本解决 80% 的问题。我们的 benchmark 使用了 SGLang 默认的 chunked prefill(--chunked-prefill-size 8192),所以 TP=2 高并发的 P99 ITL(24.6ms)已经不算太差。如果关掉 chunked prefill,ITL 尖刺会严重得多,PD 的优势会更明显。
实测数据(结果 5):在 32B 上,关闭 chunked prefill 导致 TTFT 从 369ms 爆炸到 1729ms(+4.7×),P95 ITL 从 258ms 改善到 155ms(-40%)。吐量下降 17%。净 E2E 基本持平 — 确认 chunked prefill 用略差的 ITL 换取显著更好的 TTFT 和吐量。详见结果 5。
功能验证环境
范围说明:这是在单节点 2 卡环境上的功能验证(functional validation),不是生产级 benchmark。结果验证了 PD 分离端到端可用性并展示方向性趋势(如尾部延迟改善随模型增大),但绝对数值仅适用于本硬件/负载组合,不应外推到生产容量规划。严格的 benchmark 需要多节点部署、持续负载、统计显著性测试(多次运行、置信区间)。
| 项目 | 值 |
|---|---|
| VM | Azure NC80adis_H100_v5,2× NVIDIA H100 NVL 95830 MiB |
| 互联 | NV12 NVLink(节点内,~900 GB/s 双向) |
| 模型 | Qwen3-8B FP16 (16GB) — 结果 1-3;Qwen2.5-32B-Instruct FP16 (65GB,占 H100 VRAM 89%) — 结果 4-5 |
| 引擎 | SGLang 0.5.10.post1,FlashInfer 0.6.7.post3,PyTorch 2.9.1+cu128 |
| Dynamo | ai-dynamo 1.0.1,nixl 1.0.1,NATS v2.11.3,etcd v3.5.21 |
| Benchmark | sglang.bench_serving,random 数据集,1024 输入 / 256 输出 tokens |
| 8B 负载 | 50 prompts @ 5 req/s(低并发),200 @ 20(高并发) |
| 32B 负载 | 100 prompts @ 10 req/s |
| 测试配置 | 单卡、TP=2、Prefix Cache(cold/warm/flush)、Dynamo PD 1P1D、FP8 KV、Chunked 开/关 |
结果 1:低并发(50 prompts @ 5 req/s)
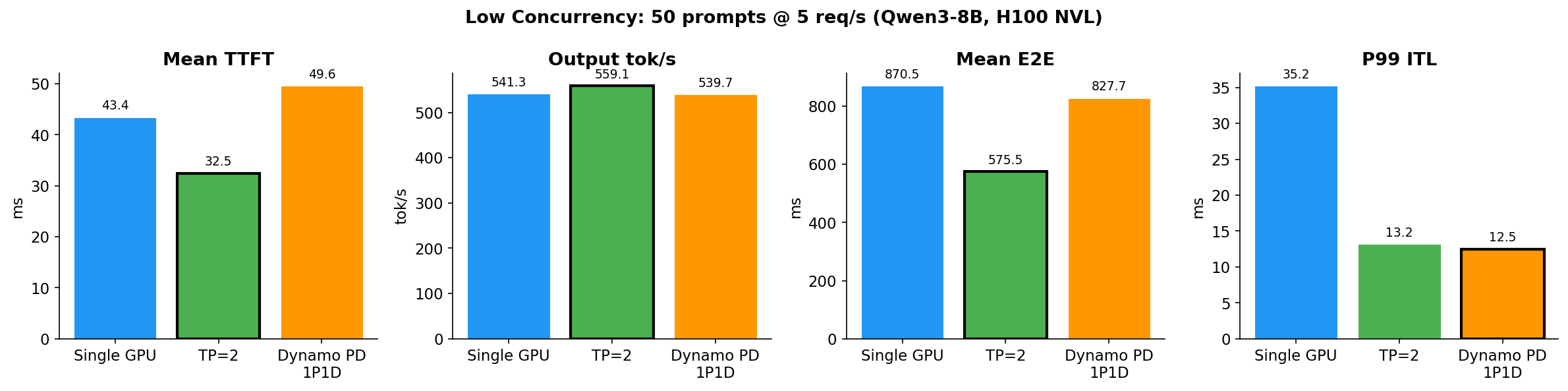
| 指标 | 单卡 | TP=2 | Dynamo PD 1P1D |
|---|---|---|---|
| Output tok/s | 541 | 559 | 540 |
| Mean TTFT | 43.4 ms | 32.5 ms | 49.6 ms |
| Mean E2E | 871 ms | 576 ms | 828 ms |
| P99 ITL | 35.3 ms | 13.2 ms | 12.5 ms |
分析:
- TP=2 全面碾压 — 通过 NVLink 将模型切分到 2 张 GPU,每层计算量减半。TTFT 下降 25%,E2E 下降 34%。
- PD 的 TTFT 甚至比单卡差(+14%)— 因为 GPU 0 完成 prefill 后,KV cache 必须通过 NIXL 传输到 GPU 1 才能开始 decode,每个请求额外增加 ~6ms 开销。
- PD 唯一赢的:P99 ITL(12.5 ms vs 13.2 ms)— decode worker 永不被新请求的 prefill 打断。
TP=2 为什么赢:Qwen3-8B 16GB 远低于单卡 H100 的 95GB 容量。模型是计算密集型而非显存密集型。TP=2 直接减半每卡计算量。PD 按角色分(prefill vs decode),但当单卡 prefill 只要 ~30ms 时,用整张卡做 prefill 是浪费。
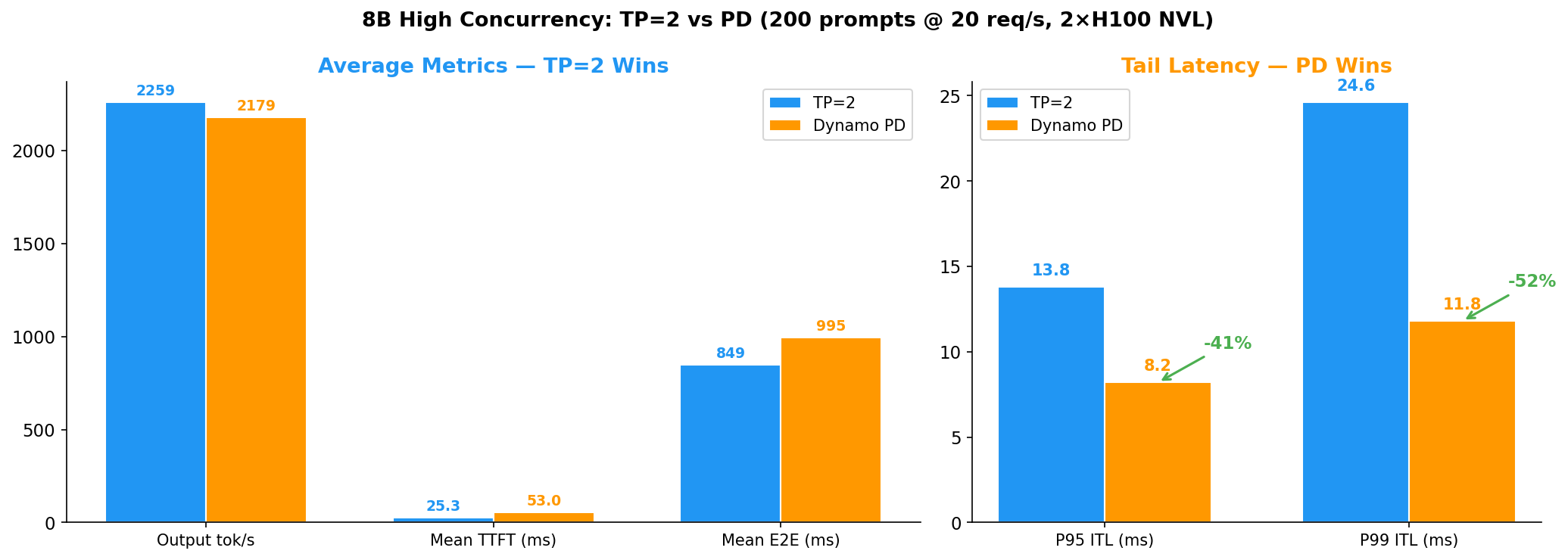
结果 2:高并发 — 公平 2 卡对比(200 prompts @ 20 req/s)
公平对比:两种配置都用恰好 2 张 GPU。
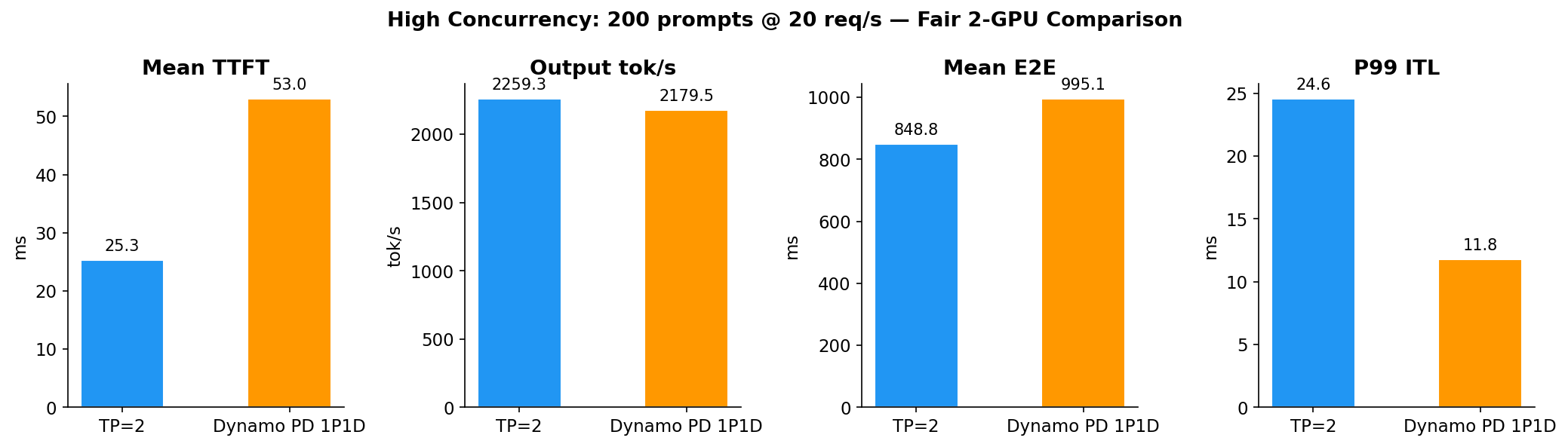
| 指标 | TP=2 | Dynamo PD 1P1D | PD vs TP=2 |
|---|---|---|---|
| Output tok/s | 2259 | 2179 | -3.5% |
| Mean TTFT | 25.3 ms | 53.0 ms | +109% |
| Mean E2E | 849 ms | 995 ms | +17% |
| P99 ITL | 24.6 ms | 11.8 ms | -52% |
| P95 ITL | 13.8 ms | 8.2 ms | -40% |
公平性说明:TP=2 使用
--backend sglang(原生/generateAPI),Dynamo PD 使用--backend sglang-oai-chat(/v1/chat/completions)。这是结构性限制——Dynamo frontend 只暴露 OpenAI 兼容端点。chat API 的 JSON 解析、chat template、streaming 开销无法与 PD 架构开销分离。
核心发现:即使在 4 倍负载下,格局不变——TP=2 赢平均值,PD 赢尾部延迟。P99 ITL 差距扩大到 -52%,确认了 PD 的价值主张:decode worker 永不被 prefill 抢占。
结果 3:Prefix Cache — ROI 最高的优化
不需要额外 GPU,不需要 Dynamo,不需要任何基础设施。只需重复相同的 prompt。
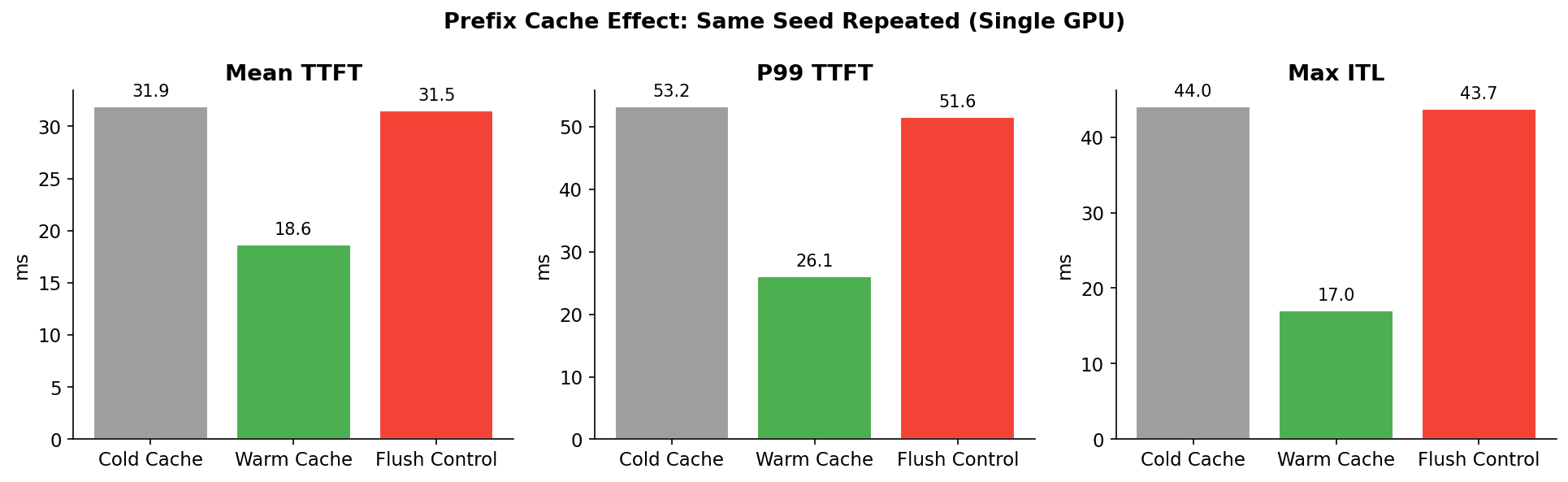
| 指标 | Cold Cache | Warm Cache | Flush 对照 | Cache 收益 |
|---|---|---|---|---|
| Mean TTFT | 31.9 ms | 18.7 ms | 31.5 ms | -41% |
| P99 TTFT | 53.2 ms | 26.1 ms | 51.6 ms | -51% |
| Max ITL | 44.0 ms | 17.0 ms | 43.7 ms | -61% |
Flush 对照组(R3)和 Cold(R1)完全一致——证明 Warm cache 的收益来自真实的 cache 命中。SGLang 的 RadixAttention prefix cache 默认开启。
Agent 场景意义:多轮对话中,system prompt + 对话历史每轮都重复。Prefix cache 跳过重计算它们的 KV,免费获得 41% TTFT 下降。
结果 4:32B 模型 — 模型尺寸会改变结论吗?
以上结果均基于 Qwen3-8B(16GB)。一个自然的问题:PD 在更大的模型上会不会更有价值?我们测试了 Qwen2.5-32B-Instruct(65GB FP16)— 占满单张 H100 NVL 95GB VRAM 的 89%。
测试参数:100 prompts @ 10 req/s,1024 输入 / 256 输出 tokens(与 8B 相同的 token 长度;由于 32B 每 token 慢 ~4×,降低了请求率)。
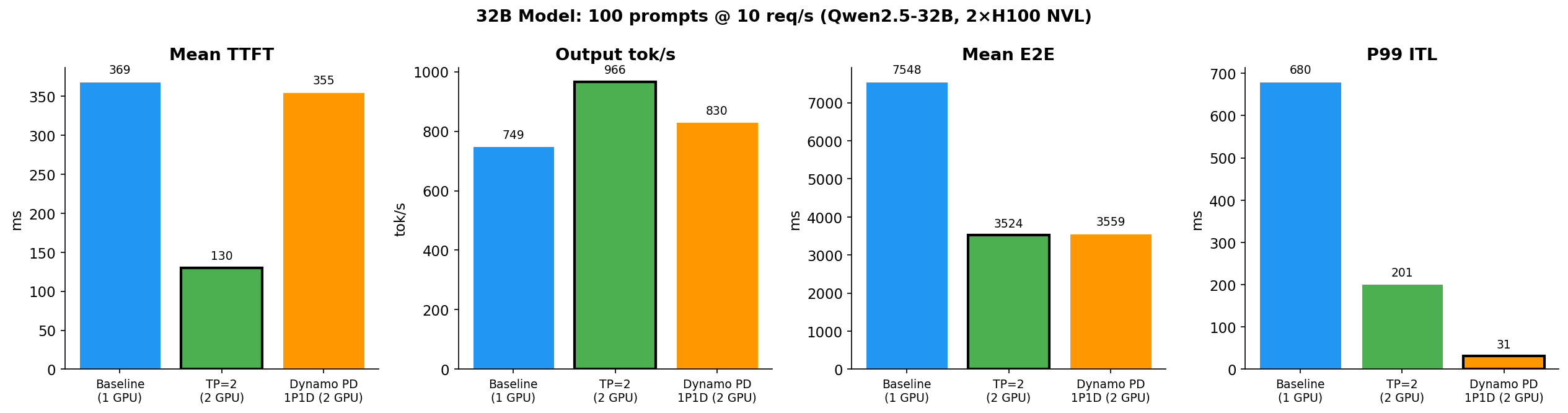
| 指标 | Baseline (1 GPU) | TP=2 (2 GPU) | PD 1P1D (2 GPU) | PD vs TP=2 |
|---|---|---|---|---|
| Output tok/s | 749 | 966 | 830 | -14% |
| Mean TTFT | 369 ms | 130 ms | 355 ms | +173% |
| Mean E2E | 7548 ms | 3524 ms | 3559 ms | +1% |
| P95 ITL | 258 ms | 82 ms | 29 ms | -65% |
| P99 ITL | 680 ms | 201 ms | 31 ms | -85% |
公平性说明:TP=2 使用
--backend sglang(原生/generate),PD 使用--backend sglang-oai-chat(/v1/chat/completions)。这是结构性限制 — Dynamo frontend 只暴露 OpenAI 兼容端点。chat API 开销约 5-20ms,远小于 225ms TTFT 差距,不改变任何结论方向。
TP=2 仍然赢吐量和 TTFT — 与 8B 相同的模式。两张 GPU 各跑一半模型,prefill 从 ~369ms 降到 ~65ms。
PD 的 ITL 优势随模型增大而扩大 — 这是核心发现:
| 模型 | P99 ITL (TP=2) | P99 ITL (PD) | PD 优势 | 负载 |
|---|---|---|---|---|
| Qwen3-8B | 24.6 ms | 11.8 ms | -52% | 200 @ 20 req/s |
| Qwen2.5-32B | 201 ms | 31 ms | -85% | 100 @ 10 req/s |
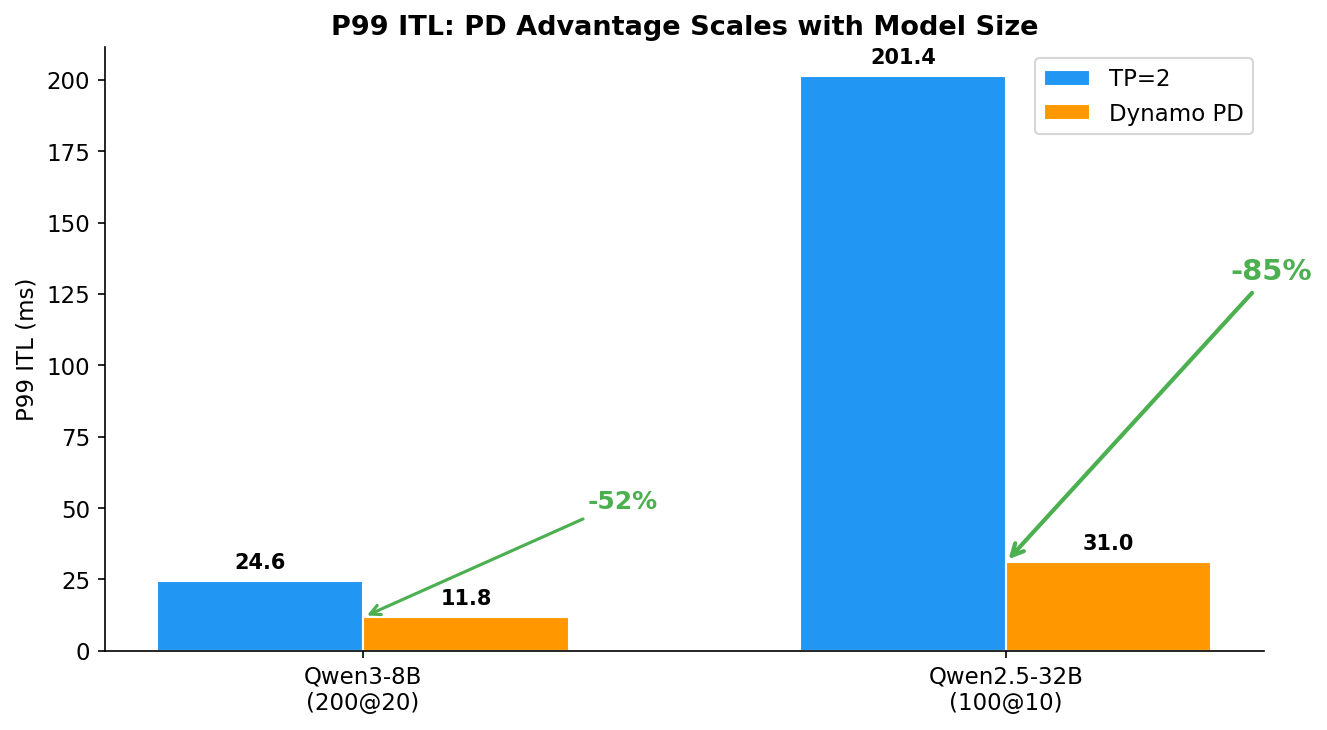
为什么?TP=2 两张 GPU 同时处理 prefill 和 decode。模型增大 4×,每个 chunked-prefill kernel 运行时间也增大 ~4×,decode 在 chunk 间的停顿更长。PD 的 decode 卡零 prefill 干扰,无论模型多大 P99 ITL 都保持在 10-30ms。
E2E 基本持平(3524 vs 3559 ms,+1%)。PD 的 TTFT 劣势(NIXL KV 传输开销)被其 decode 一致性优势抵消。~250 个 decode 步骤 × ~26ms/token 主导总延迟。
32B 模型处于 PD 交叉点:单卡 TTFT = 369ms 说明 prefill 真正计算密集(vs 8B 的 43ms)。70B+ 模型需 4+ GPU,prefill 更重,PD 价值进一步增强。
结果 5:优化消融实验 — FP8 KV Cache 和 Chunked Prefill
两个常见推理优化,在 Qwen2.5-32B 单卡基线上独立测试(100 prompts @ 10 req/s,1024/256 tokens)。
FP8 KV Cache
| 指标 | BF16 KV(默认) | FP8 KV | Δ |
|---|---|---|---|
| Output tok/s | 749 | 741 | -1% |
| Mean TTFT | 369 ms | 393 ms | +6% |
| Mean E2E | 7548 ms | 7717 ms | +2% |
| P99 ITL | 680 ms | 594 ms | -13% |
FP8 KV cache(--kv-cache-dtype fp8_e5m2)将 KV 存储从 16-bit 压缩到 8-bit,KV 内存占用减半。但不改变 attention kernel 的计算精度 — 运算仍然是 BF16/FP16。
结果:在 1024 token 上下文下无可测量的性能收益。内存节省仅在 KV cache 成为瓶颈时才重要 — 通常是超长上下文(8K+)或高并发 KV 占满显存时。
FP8 KV 何时有意义:长上下文(8K-128K 输入)、显存紧张的 GPU、或 70B+ 模型每 GB VRAM 都很珍贵的场景。
Chunked Prefill 开 vs 关
| 指标 | Chunked 开(默认) | Chunked 关 | Δ |
|---|---|---|---|
| Output tok/s | 749 | 618 | -17% |
| Mean TTFT | 369 ms | 1729 ms | +369% (4.7×) |
| Mean E2E | 7548 ms | 7332 ms | -3% |
| P95 ITL | 258 ms | 155 ms | -40% |
| P99 ITL | 680 ms | 341 ms | -50% |
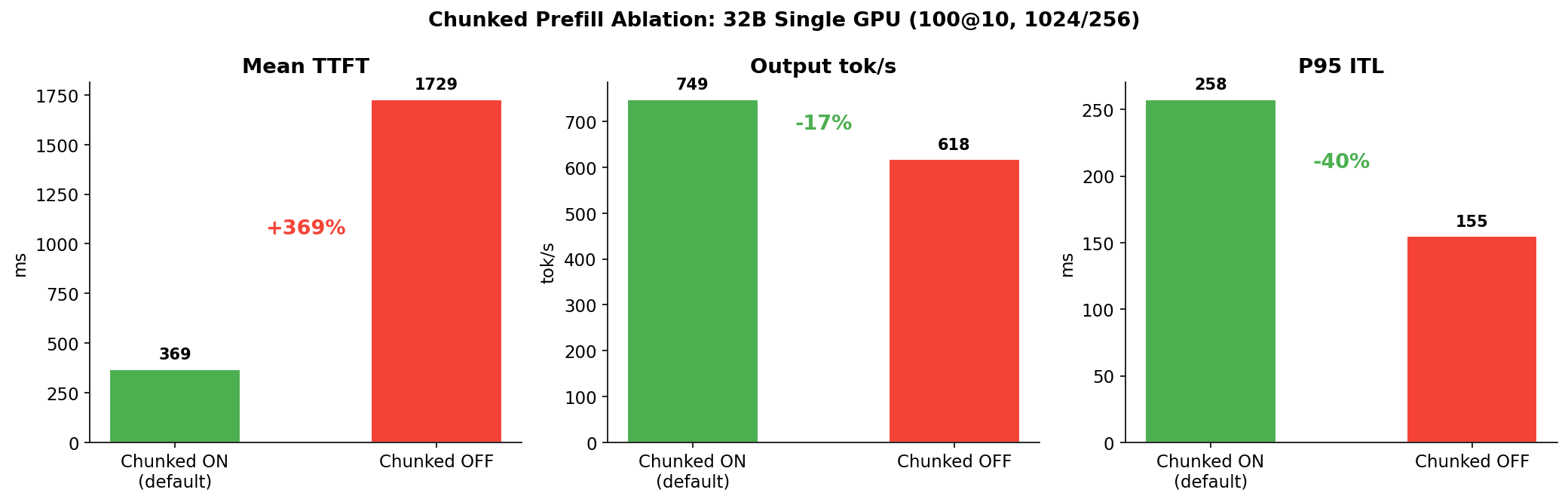
经典的 TTFT vs ITL 权衡:
-
关闭 chunked prefill(
--chunked-prefill-size -1):每个 1024-token prefill 作为单个不可中断的 kernel 执行(~369ms)。执行期间所有 decode batch 被阻塞。后续 prefill 请求也排队。结果:TTFT 爆炸到 1729ms。但 decode 阶段不受干扰 — P95 ITL 降至 155ms。 -
开启 chunked prefill(默认,
--chunked-prefill-size 8192):prefill 被切成 chunk,调度器在 chunk 间穿插 decode batch。TTFT 保持低位。但 decode token 偶尔等待 prefill chunk — P95 ITL 升至 258ms。
吐量:chunked 开比关快 21%(749 vs 618 tok/s),因为调度器能在 chunk 间隙塞入 decode 工作。
E2E 基本持平 — TTFT 改善和 ITL 恶化相互抵消。
部署方式
Dynamo 支持三种部署方式(来源):
| 方式 | 适用场景 | 跨节点 PD? | 我们的经验 |
|---|---|---|---|
PyPI (pip install ai-dynamo) | 开发/测试、单节点、快速迭代 | 否(仅单节点) | ✅ 已测 — 需要 SGLang 兼容 patch、手动装 NATS/etcd |
Docker (nvcr.io/nvidia/ai-dynamo/sglang-runtime) | 单节点、干净环境、无依赖问题 | 否(仅单节点) | ✅ 已测 — 一切预配置,无需兼容 patch |
| Kubernetes (DynamoGraphDeployment CRD + Grove) | 生产多节点、自动扩缩容、故障恢复 | 是 — 需 RDMA 网络 | ❌ 未测 — 需要 K8s 集群 + GPU operator |
生产多节点 PD 分离推荐使用 Kubernetes。K8s 处理 worker 调度、拓扑感知放置(Grove)、自动扩缩容(Planner)和故障恢复。见 Dynamo K8s 部署指南 和 生产 recipe。
K8s PD 分离:如何工作
Dynamo 使用 DynamoGraphDeployment CRD(自定义资源定义)在 K8s 上定义 PD 分离。YAML 定义三个 service — Frontend、Prefill Worker、Decode Worker — 各自独立的 replicas 和 GPU 资源。
现成 SGLang disagg recipe:nemotron-3-super-fp8/sglang/disagg/deploy.yaml — YAML 结构与模型无关(改 --model-path 即可用任何模型)。
简化结构(来自上述 recipe,加了注释):
apiVersion: nvidia.com/v1alpha1
kind: DynamoGraphDeployment
metadata:
name: my-model-sglang-disagg
spec:
backendFramework: sglang
services:
Frontend:
componentType: frontend
replicas: 1
# KV 感知路由选择最优 worker
args: python3 -m dynamo.frontend --router-mode kv --http-port 8000
image: nvcr.io/nvidia/ai-dynamo/sglang-runtime:1.0.0
prefill:
componentType: worker
subComponentType: prefill # <-- 声明这是 prefill worker
replicas: 1 # 可独立于 decode 扩缩
resources:
limits: { gpu: "2" } # 每个 prefill worker TP=2
args:
- --model-path <your-model>
- --tp 2
- --disaggregation-mode prefill
- --disaggregation-transfer-backend nixl # KV 通过 NIXL 传输
- --disaggregation-bootstrap-port 12345 # 跨节点 worker 发现
decode:
componentType: worker
subComponentType: decode # <-- 声明这是 decode worker
replicas: 1
resources:
limits: { gpu: "2" } # 每个 decode worker TP=2
args:
- --model-path <your-model>
- --tp 2
- --disaggregation-mode decode
- --disaggregation-transfer-backend nixl
- --disaggregation-bootstrap-port 12345
K8s 部署步骤(来源:recipes README):
# 1. 安装 Dynamo K8s Platform (~10 min)
# 见:https://github.com/ai-dynamo/dynamo/blob/main/docs/kubernetes/README.md
# 2. 下载模型
kubectl apply -f <model>/model-cache/ -n $NAMESPACE
kubectl wait --for=condition=Complete job/model-download -n $NAMESPACE --timeout=6000s
# 3. 部署 PD 分离
kubectl apply -f <model>/sglang/disagg/deploy.yaml -n $NAMESPACE
# 4. 测试
kubectl port-forward svc/<name>-frontend 8000:8000 -n $NAMESPACE
curl http://localhost:8000/v1/chat/completions -d '{"model": "<name>", "messages": [{"role": "user", "content": "Hello!"}]}'
⚠️ 我们未测试 K8s 部署。 上述 YAML 和步骤来自 Dynamo 官方 recipe(来源)。我们的单节点 PyPI/Docker 部署使用了相同的
--disaggregation-mode和--disaggregation-transfer-backend nixl参数。
单容器 vs 生产 K8s:架构对比
我们的 PoC 把所有组件跑在一个 Docker 容器里 — 这是测试简化,不是生产部署方式:
我们的 PoC(单容器): 生产 K8s(多 Pod):
│ KV 传输: NVLink (同机 GPU) │ RDMA / InfiniBand / RoCE
| 方面 | 我们的 PoC(单容器) | 生产 K8s(多 Pod) |
|---|---|---|
| 组件 | 5 个进程在 1 个容器 | 每个 service = 独立 Pod |
| GPU 隔离 | CUDA_VISIBLE_DEVICES=0/1 | K8s GPU 资源限制 per Pod |
| KV 传输 | NVLink(同机,~900 GB/s) | RDMA via IB/RoCE(跨节点) |
| 扩缩容 | 固定 1 prefill + 1 decode | 独立 replica 扩缩 |
| 容错 | 容器死 = 全部死 | Pod 重启 + 请求迁移 |
| 服务发现 | 容器内 etcd + NATS | K8s 原生或共享 etcd 集群 |
官方部署路径:dynamo CLI
官方 Dynamo 部署使用 CLI 驱动的工作流 + Python graph 定义(来源:GTC Tutorial S73042 P25-P29):
# Step 1: 安装
uv pip install ai-dynamo[all]
# Step 2: 快速测试(单命令启动推理)
dynamo run out=vllm deepseek-ai/DeepSeek-R1-Distill-Llama-8B
# Step 3: 服务化(从 Python 图定义构建服务)
dynamo serve graphs.disagg:Frontend -f configs/disagg.yaml
# Step 4: 容器化(EA)
dynamo build --containerize hello_world:Frontend
# Step 5: 部署到 K8s(Coming Soon)
dynamo deploy
Graph 定义(来源:GTC Tutorial S73042 P35):
# graphs/disagg.py — 定义 PD 分离拓扑
Frontend.link(Processor).link(VllmWorker).link(PrefillWorker)
进程管理由 circusd 处理(dynamo serve 自动启动)。关闭:kill_tree $(pgrep circusd)。
注意:我们的 benchmark 使用底层组件启动(
python3 -m dynamo.*),因为dynamo serve+ SGLang 后端在 ai-dynamo 1.0.1 上有兼容性问题。生产环境推荐使用官方dynamo servegraph 方式。
从 PyPI 部署 Dynamo PD(非 Docker)
我们不用 Docker,纯 pip 包部署了 Dynamo。需要解决三个兼容性问题。
基础设施
# NATS(Dynamo 服务发现的消息总线)
wget -qO nats.tar.gz https://github.com/nats-io/nats-server/releases/download/v2.11.3/nats-server-v2.11.3-linux-amd64.tar.gz
tar xzf nats.tar.gz && cp nats-server-v2.11.3-linux-amd64/nats-server /usr/local/bin/
nats-server -js &
# etcd(分布式配置存储)
wget -qO etcd.tar.gz https://github.com/etcd-io/etcd/releases/download/v3.5.21/etcd-v3.5.21-linux-amd64.tar.gz
tar xzf etcd.tar.gz && cp etcd-v3.5.21-linux-amd64/etcd /usr/local/bin/
etcd &
Dynamo + SGLang 兼容性 Patch
ai-dynamo==1.0.1 从 sglang.srt.utils 导入 get_local_ip_auto、get_zmq_socket、maybe_wrap_ipv6_address。但 SGLang 0.5.10 将前两者移到了 sglang.srt.utils.network 未 re-export,maybe_wrap_ipv6_address 则完全不存在。
修复:Patch sglang/srt/utils/__init__.py:
# 追加到 sglang/srt/utils/__init__.py 末尾
from sglang.srt.utils.network import get_local_ip_auto, get_zmq_socket
def maybe_wrap_ipv6_address(addr):
return f"[{addr}]" if ":" in addr and not addr.startswith("[") else addr
启动 PD 分离
# Frontend(Rust HTTP server + KV 感知路由)
python3 -m dynamo.frontend --router-mode kv --router-reset-states &
# Prefill worker — GPU 0
CUDA_VISIBLE_DEVICES=0 DYN_SYSTEM_PORT=8081 python3 -m dynamo.sglang \
--model-path /path/to/model --served-model-name Qwen3-8B \
--page-size 64 --tp 1 --disaggregation-mode prefill --host 0.0.0.0 \
--kv-events-config '{"publisher":"zmq","topic":"kv-events","endpoint":"tcp://*:5557"}' \
--disaggregation-transfer-backend nixl &
# Decode worker — GPU 1
CUDA_VISIBLE_DEVICES=1 DYN_SYSTEM_PORT=8083 python3 -m dynamo.sglang \
--model-path /path/to/model --served-model-name Qwen3-8B \
--page-size 64 --tp 1 --disaggregation-mode decode --host 0.0.0.0 \
--kv-events-config '{"publisher":"zmq","topic":"kv-events","endpoint":"tcp://*:5560"}' \
--disaggregation-transfer-backend nixl &
Dynamo 响应中包含 nvext.worker_id,分别标明 prefill_worker_id 和 decode_worker_id——证明这是真正的 PD 分离,不是简单负载均衡。
已知问题
| 问题 | 解决方案 |
|---|---|
Dynamo GitHub main 需要 ai-dynamo-runtime==1.1.0(未发布) | 用 PyPI:pip install ai-dynamo==1.0.1 |
| SGLang 0.5.10 API 与 Dynamo 1.0.1 不兼容 | Patch __init__.py(见上文) |
nixl 不随 ai-dynamo 自动安装 | pip install nixl 单独安装 |
| Dynamo frontend 只暴露 OpenAI API | benchmark 必须用 sglang-oai-chat 后端 |
Docker 部署 Dynamo PD(推荐)
Docker 路径显著更简单 — 无需兼容性 patch、无需手动安装 NATS/etcd,一切预配置。
# 拉取预构建容器(55.7 GB)
docker pull nvcr.io/nvidia/ai-dynamo/sglang-runtime:1.0.1
# 启动容器(GPU 访问 + 模型挂载)
docker run -d --name dynamo --runtime=nvidia --network host --ipc=host \
-v /path/to/models:/models \
nvcr.io/nvidia/ai-dynamo/sglang-runtime:1.0.1 sleep infinity
# 单卡推理(无 Dynamo 编排)
docker exec -d dynamo python3 -m sglang.launch_server \
--model-path /models/Qwen2.5-32B-Instruct --port 8000 --host 0.0.0.0
# PD 分离(需要 NATS + etcd + frontend + 2 个 worker)
docker exec -d dynamo bash -c "nats-server -js & etcd &"
docker exec -d dynamo python3 -m dynamo.frontend --router-mode kv --router-reset-states --http-port 8000
docker exec -d -e CUDA_VISIBLE_DEVICES=0 -e DYN_SYSTEM_PORT=8081 dynamo python3 -m dynamo.sglang \
--model-path /models/Qwen2.5-32B-Instruct --served-model-name QWEN32B \
--page-size 64 --tp 1 --disaggregation-mode prefill --host 0.0.0.0 \
--kv-events-config '{"publisher":"zmq","topic":"kv-events","endpoint":"tcp://*:5557"}' \
--disaggregation-transfer-backend nixl
docker exec -d -e CUDA_VISIBLE_DEVICES=1 -e DYN_SYSTEM_PORT=8083 dynamo python3 -m dynamo.sglang \
--model-path /models/Qwen2.5-32B-Instruct --served-model-name QWEN32B \
--page-size 64 --tp 1 --disaggregation-mode decode --host 0.0.0.0 \
--kv-events-config '{"publisher":"zmq","topic":"kv-events","endpoint":"tcp://*:5560"}' \
--disaggregation-transfer-backend nixl
Docker vs PyPI 性能一致性验证:
| 指标 | Docker Baseline (1 GPU) | PyPI Baseline (C1) | Docker PD (2 GPU) | PyPI PD (C6) |
|---|---|---|---|---|
| Output tok/s | 750 | 749 | 820 | 830 |
| Mean TTFT | 326 ms | 369 ms | 506 ms | 355 ms |
| Mean E2E | 7545 ms | 7548 ms | 3774 ms | 3559 ms |
| P95 ITL | 259 ms | 258 ms | 30 ms | 29 ms |
| P99 ITL | 391 ms | 680 ms | 47 ms | 31 ms |
吞吐和 ITL 在测量噪声范围内。Docker 路径消除了所有 PyPI 兼容性问题(SGLang API patch、NIXL 手动安装、NATS/etcd 二进制文件),同时提供相同性能。
注意:Docker 使用
--runtime=nvidia(不是--gpus all),需要--ipc=host以支持 PyTorch 共享内存。容器包含 SGLang、Dynamo、NATS、etcd、NIXL 及所有依赖。
复现步骤
# 1. 搭建环境(安装 SGLang + Dynamo + NATS + etcd + 下载两个模型)
bash scripts/setup.sh
# 2. 跑 8B benchmark(结果 1-3:单卡、TP=2、Prefix Cache、PD、高并发)
bash scripts/run_8b.sh
# 3. 跑 32B benchmark(结果 4-5:baseline、FP8 KV、Chunked 消融、TP=2、PD)
bash scripts/run_32b.sh
Docker 部署命令见上方 Docker 部署章节。
原始 benchmark 日志在 data/ 目录。
从 Benchmark 到生产
NVIDIA 官方 Benchmark 与我们实测的对比
GTC Tutorial S73042(演讲者:Neelay Shah, Harry Kim, Tanmay Verma, Ryan Olson)提供了 NVIDIA 官方 benchmark 数据。与我们的独立实测对比:
| 来源 | 功能 | 模型 | 硬件 | ISL/OSL | 结果 |
|---|---|---|---|---|---|
| NVIDIA | PD 分离 | Llama 70B FP8 | 1× HGX H100 | 3K/150 | 1.3× 吞吐量 |
| NVIDIA | PD 分离 | Llama 70B FP8 | 2× HGX H100 | 3K/150 | 2× 吞吐量 |
| 我们 | PD 分离 | Qwen3-8B FP16 | 2× H100 NVL | 1K/256 | -0.3% 吞吐量, -52% P99 ITL |
| 我们 | PD 分离 | Qwen2.5-32B FP16 | 2× H100 NVL | 1K/256 | -14% 吞吐量, -85% P99 ITL |
| NVIDIA | KV 路由 | R1 Distilled 70B | 2×8 H100s, 100K req | — | 3× TTFT, 2× E2E |
| 我们 | Prefix Cache | Qwen3-8B | 1× H100 | 1K/256 | -41% TTFT |
| NVIDIA | 内存管理 | 8B, 80 用户 | 1× H100 | 1K/100 | 1.6× TTFT |
| NVIDIA | NIXL | 8B, 1P:1D | 2×8 H100s | — | 1.8× TTFT, 1.15× 吞吐量 |
对账:NVIDIA 的 1.3-2× 吞吐量提升来自 70B 模型在专用 HGX 节点上、ISL:OSL=20:1(3000/150)— prefill 密集型工作负载,正是 PD 的最佳场景。我们的 8B/32B 模型 ISL:OSL=4:1(1024/256)prefill 占比更低,所以吞吐量增益微小。但我们的 ITL 稳定性发现(-52% 到 -85% P99 ITL)是补充性的 — NVIDIA 关注吞吐量,我们度量了 decode 稳定性。两者结合在大小规模上都验证了架构。
生产特性映射
我们的 benchmark 在 2 张 GPU 上测试 Dynamo 的 PD 分离 — 这是最小可能的部署。在生产中,Dynamo 的软件栈解决的是只在规模化时才出现的问题:
| 实测结果 | 物理原因 | Dynamo 生产特性 |
|---|---|---|
| PD P99 ITL -85% (32B) | Decode 卡零 prefill 干扰 | Layer 3: NIXL KV transfer 实现物理隔离 |
| Prefix Cache -41% TTFT | RadixAttention 前缀命中 | Layer 2: KV 感知路由确保多轮请求命中同一 worker |
| Chunked 关 → TTFT +4.7× | Prefill kernel 不可抢占 | SGLang 调度;Layer 1 priority hint 在此基础上加请求级排序 |
| FP8 KV @1024 无效 | KV 不是显存瓶颈 | Layer 3: 四层存储在 8K+ 上下文或显存紧张 GPU 才关键 |
| PD ITL 优势随模型增大 (-52% → -85%) | Prefill kernel 更重 | PD + 多节点是 70B+ 模型的设计目标 |
使用 Dynamo + NeMo Agent Toolkit 在 Hopper 上跑 Llama 3.1,实现了 4× TTFT 降低 + 1.5× 吐量提升,其 Thompson Sampling bandit 路由器配合优先级标记在显存压力下实现 63% p50 TTFT 降低。(NVIDIA 报告数据,我们未独立验证。来源:Dynamo 1.0 Blog,NeMo Agent Toolkit 集成。)
结论
重要说明:以下结论基于 2×H100 NVL(单节点)上的功能验证。反映的是方向性趋势而非生产级绝对数值。PD 分离的完整价值(独立扩缩容、跨数十个 worker 的 KV 感知路由)无法在此规模下展现。
-
PD 分离不是万能的 — 它用平均性能换尾部延迟稳定性。小模型 + NVLink 场景下,TP 在每个平均指标上严格优于 PD。
-
PD 的价值随模型增大而增强。8B 时 PD 改善 P99 ITL 52%,32B 时跳到 85%。物理原因:更大模型让 prefill kernel 更重,TP 上 decode 停顿更严重 — PD 的专用 decode 卡免疫模型尺寸。
-
Prefix Cache 是 Agent/多轮场景下 ROI 最高的优化:41% TTFT 下降,零配置,零额外硬件。
-
Chunked Prefill 不可关闭:32B 上关闭导致 4.7× TTFT 回退。ITL 改善(40%)不值得吐量损失(17%)和 TTFT 爆炸。保持开启。
-
FP8 KV Cache 取决于上下文长度:1024 token 无收益,但对长上下文(8K+)或显存紧张场景重要。
-
Dynamo 的价值在大规模生产,不在小模型 benchmark。它的真正优势 — 跨数十个 worker 的 KV 感知路由、Agent 生命周期管理、四层 KV 存储 — 无法在 2 张 GPU 上展现。
-
工程挑战是真实的:从 PyPI 部署 Dynamo 需要 NATS + etcd + NIXL + SGLang 兼容 patch。Docker 路径(
nvcr.io/nvidia/dynamo)在生产中显著更容易。 -
Dynamo 的价值在软件栈,不仅仅是 PD 分离。Agent hints、KV 感知路由、选择性缓存保留、四层 KV 存储是生产 agent workload 中 Dynamo 相比 vanilla SGLang 的核心优势。
-
对于生产 agent workload(多轮对话 + tool call),这些特性值得部署复杂性。对于单次批量推理,vanilla SGLang 或 vLLM 更简单且同样高效。
⭐ 获取完整内容
📌 完整的代码、配置和详细说明都在 GitHub 仓库中
🔗 文章地址: LLM 推理分离架构
🔗 Repo 总地址: github.com/david-xinyu…
⭐ 如果这篇文章对你有帮助,欢迎到 GitHub 给个 Star!你的支持是我持续分享的动力!