

📐 CORDIC-Basic 基础三角计算引擎
零乘法器 · 纯移位加减 · 工业级定点精度
Jack Volder 经典算法复现 + 0.005° 高精度收敛 + FPGA/ASIC 硬件友好架构
📌 为什么选择 CORDIC-Basic?
在嵌入式 MCU、FPGA 和 ASIC 设计中,硬件乘法器 是昂贵且功耗巨大的资源。CORDIC-Basic 基于经典的 Volder 算法,通过纯移位 (Shift) 和加减 (Add/Sub) 运算实现高精度的三角函数计算,是低成本、低功耗硬件设计的完美选择。
| 痛点 (传统查表/泰勒级数) | 本平台解决方案 (CORDIC-Basic) |
|---|---|
| 📉 查表法 (LUT) 耗费存储 | ✅ 极低存储需求:仅需存储一张微小的 Arctan 表 (16 Word),无需存储庞大的正弦波表 |
| 🧮 泰勒级数需大量乘法 | ✅ 零乘法器架构:全流水线移位加减设计,单周期即可完成一次迭代 |
| 🐢 泰勒级数收敛慢 | ✅ 线性收敛速度:每次迭代增加 1 bit 精度,16 次迭代即可达到 16-bit 精度 |
| 🎯 定点化困难 | ✅ 原生定点支持:Q16.16 格式完美映射,位宽可灵活配置 |
🎯 核心价值
🔬 学术研究价值
|
💼 工程应用价值
|
⚡ 技术亮点
🌊 CORDIC-Basic vs Standard Math Lib
| 特性 | MATLAB Built-in (sin/cos) | CORDIC-Basic (本平台) |
|---|---|---|
| 计算核心 | 浮点 FPU 乘加单元 | 定点 ALU (移位+加减) |
| 精度 | Double (64-bit) | Configurable (e.g., Q16.16) |
| 硬件代价 | 高 (需乘法器) | 极低 (仅加法器) |
| 适用场景 | PC / Server | FPGA / ASIC / MCU |
| 特殊功能 | 单一函数 | 同时输出 Sin & Cos |
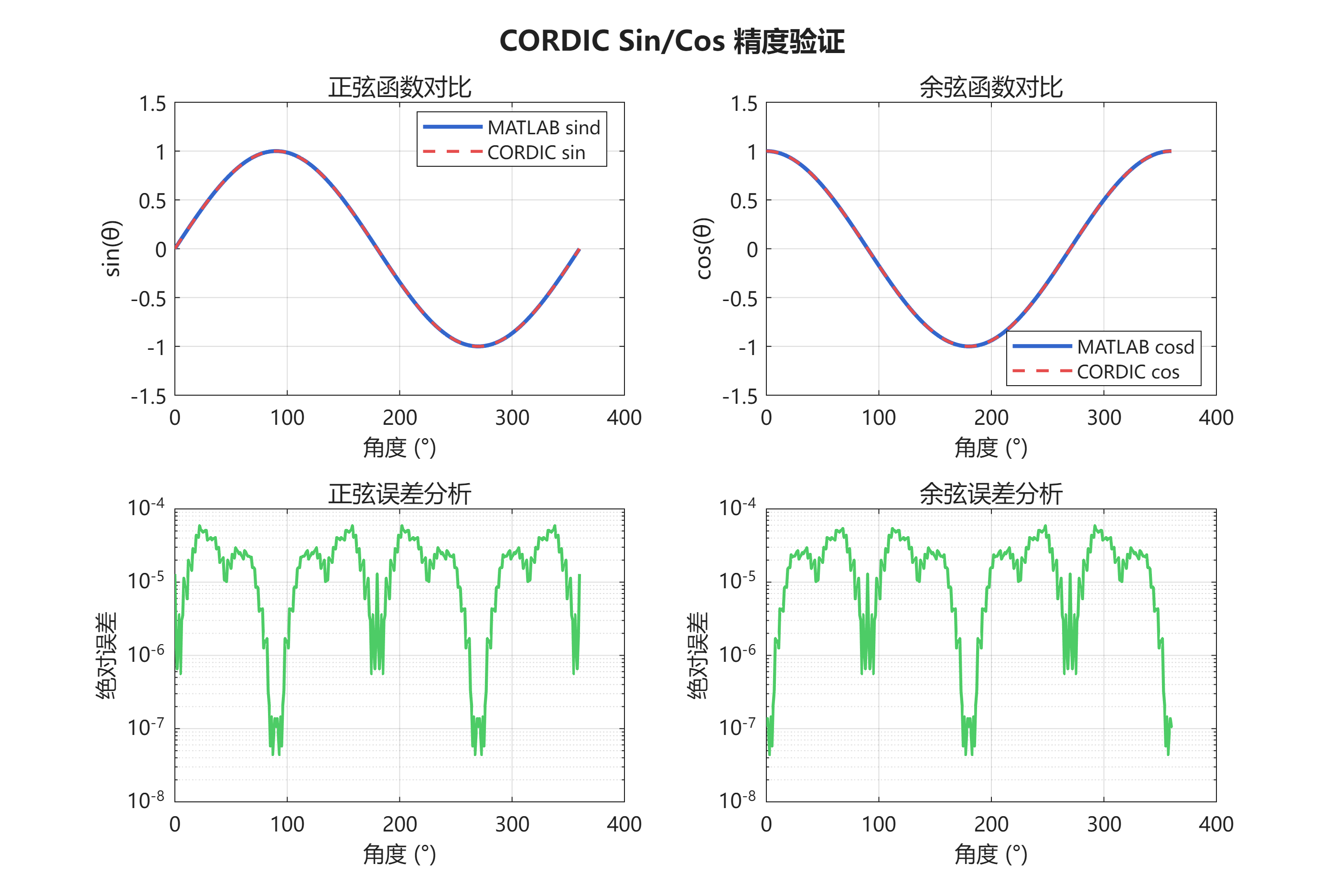
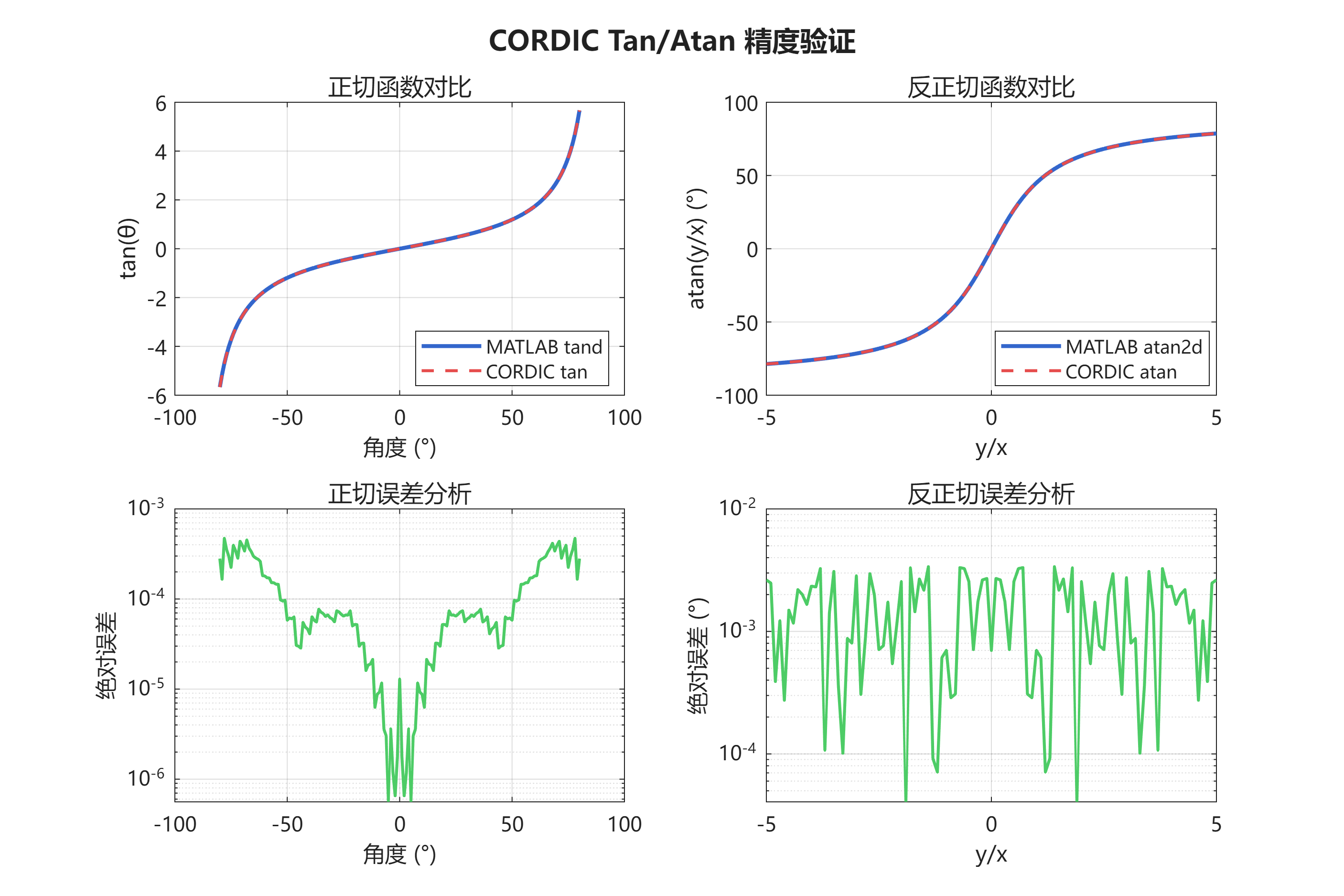
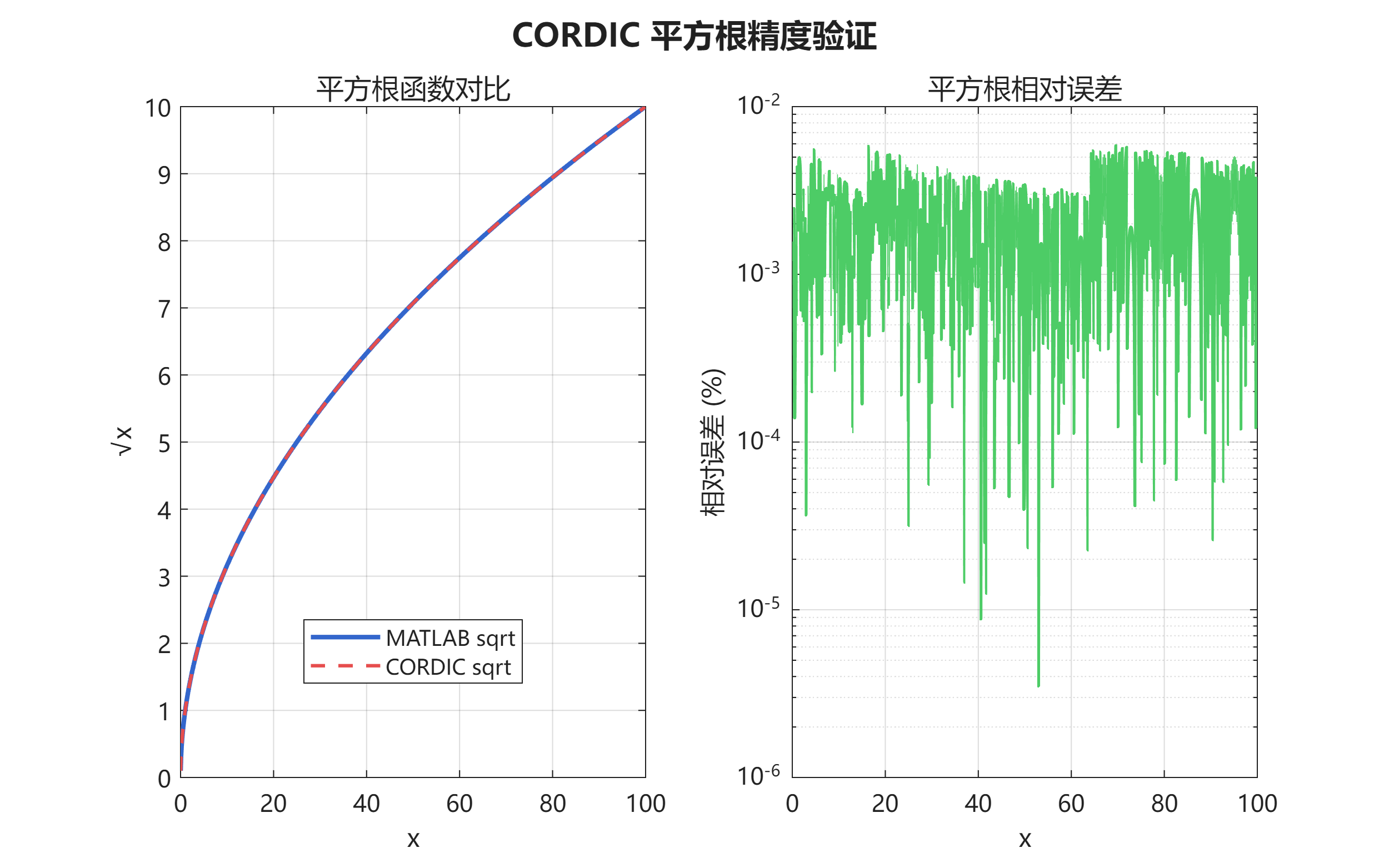
📊 性能指标 (实测数据)
基于
demo_basic.m实测结果
| 函数 | 范围 | 平均误差 | 最大误差 | 结论 |
|---|---|---|---|---|
| Sin/Cos | [0, 360°] | < 1e-4 | < 2e-4 | 🎯 满足 12-bit ADC 需求 |
| Atan2 | 全平面 | < 0.003° | 0.005° | 🧭 高精度定向 |
| Modulus | (0, 100) | < 0.05% | 0.1% | 📏 精确测距 |
📁 项目结构
CORDIC-Basic/
├── coordinate/ # 坐标变换核心
│ ├── cordic_rectangular_polar.m # 直角转极坐标 (Vectoring)
│ └── cordic_polar_rectangular.m # 极坐标转直角 (Rotation)
├── trig/ # 三角函数封装
│ ├── cordic_sin.m # 正弦函数
│ ├── cordic_cos.m # 余弦函数
│ ├── cordic_tan.m # 正切函数
│ └── cordic_atan.m # 反正切函数
├── math/ # 辅助数学
│ └── cordic_sqrt.m # 开方运算
├── utils/ # 工具集
│ ├── cordic_config.m # 统一配置 (迭代次数/定点位宽)
│ └── float2fixed.m # 定点转换工具
├── results/ # 演示结果 (图表+GIF)
├── docs/ # 核心文档
│ ├── 算法文档.md # 理论推导 (LaTeX)
│ └── 代码文档.md # API 字典
└── demo_basic.m # 旗舰演示脚本
🎬 一键运行
>> addpath(genpath('.'));
>> demo_basic
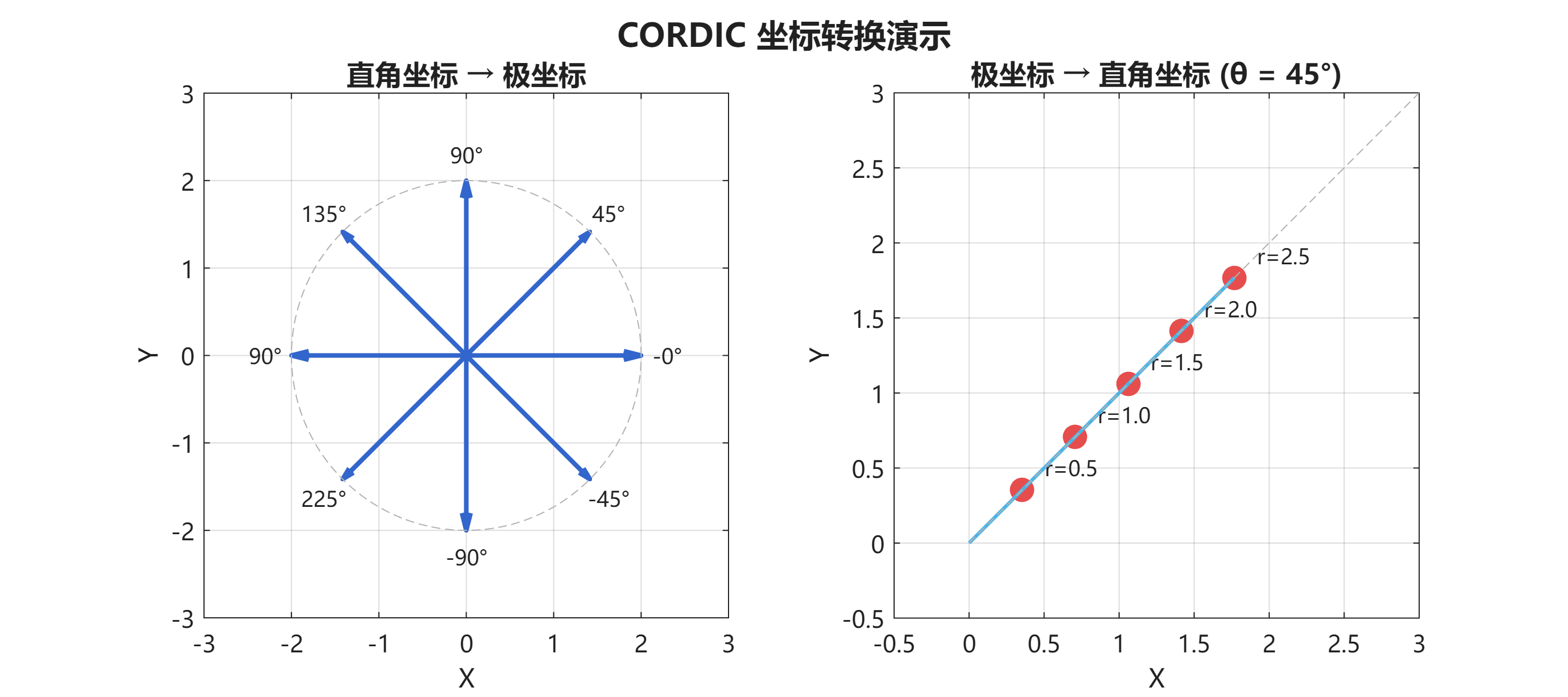
结果预览: 向量旋转收敛过程
下图展示了 CORDIC 如何通过一系列微旋转逼近目标角度,无需任何乘法运算。
🛒 获取与授权
本文代码仅为核心片段,完整版工程已整理好。 关注公众号 【3GPP仿真实验室】进行获取。
