

前言
智能无人系统快速发展,视觉感知能力已成为移动机器人、无人机乃至自动驾驶平台的核心竞争力之一。然而,从原始视频流到可用的结构化感知信息,中间涉及相机驱动、算法部署、实时推流、硬件适配等多个技术环节,开发门槛高、周期长。
本文将介绍一个专为智能无人系统打造的边缘实时感知 SDK。
项目介绍
SpireCV 是一套面向边缘计算场景的轻量级视觉感知软件开发套件,目标是让大家能以更低的成本、更快的速度构建具备"看懂世界"能力的智能体。
它不仅封装了主流相机与吊舱的控制接口,还集成了经过优化的目标检测、跟踪、几何特征识别等算法模块,并支持视频录制、低延迟推流及边缘端数据闭环管理。
整个 SDK 设计强调高性能、高可靠性和跨平台兼容性,适用于科研验证、产品原型开发乃至小批量部署。
项目功能
1、相机与吊舱控制
支持常见工业相机、USB 摄像头及云台吊舱,提供统一 API 实现参数调节、图像采集与设备管理;
2、视频输入/保存/推流
可从本地文件、RTSP 流或设备读取视频,支持 MP4 录制与 RTMP/H.264 低延迟推流;
3、目标感知能力
内置二维码识别、起降标志检测、椭圆拟合、通用目标检测与点击跟踪等功能,覆盖典型无人系统任务需求;
4、单目深度估计
基于轻量化模型实现单摄像头深度图生成,为避障与导航提供辅助信息;
5、感知数据交互
通过 UDP 协议输出结构化感知结果,便于与飞控、决策模块通信;同时提供 ROS 接口,无缝融入机器人开发生态。
项目框架
主要框架
项目特点
- 统一感知软硬件接口,提供全套技术支持
- 具备高性能、功能丰富、接口简洁的视觉感知能力
- 支持零代码多平台部署
- 相机读写
- 检测跟踪算法
- 吊舱控制
- 信息交互
项目情况
功能层
- 视频算法模块(提供接口统一、性能高效、功能多样的感知算法)
- 视频输入、保存与推流模块(提供稳定、跨平台的视频读写能力)
- 相机、吊舱控制模块(针对典型硬件生态打通接口,易使用)
- 感知信息交互模块(提供UDP通信协议)
- ROS接口
平台层
- X86+Nvidia GPU(推荐10系、20系、30系、40系显卡)
- Jetson(AGX Orin/Xavier、Orin NX/Nano、Xavier NX)
- Intel CPU
- HUAWEI Ascend(推进中)
- Rockchip(推进中)
项目说明
1、安装及使用
SpireCV使用手册(SpireCV-Pro-wolai版本、SpireMS-wolai版本、SpireCV 1.0-wolai版本)、SpireCV开发套件指南
2、需掌握C++语言基础、CMake编译工具基础。
3、需要掌握OpenCV视觉库基础,了解CUDA、OpenVINO、RKNN和CANN等计算库。
4、需要了解ROS基本概念及基本操作。
项目效果
二维码检测
起降标志检测
椭圆检测
目标点击跟踪(含目标检测、目标跟踪)
低延迟推流
通用目标检测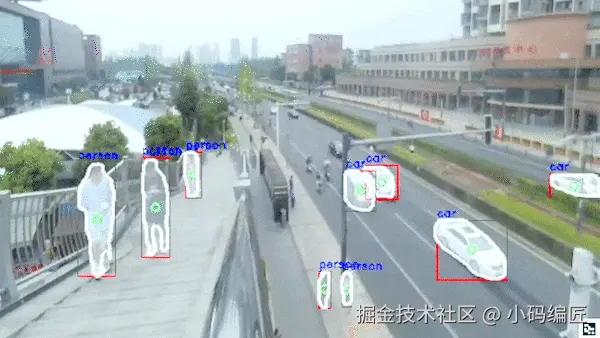
项目源码
SpireCV 为完全开源项目,代码托管于 GitHub 与 Gitee 双平台:
GitHub:github.com/amov-lab/Sp…
Gitee:gitee.com/amovlab/Spi…
总结
SpireCV 并不是一个炫技的算法展示库,而是一个真正面向工程落地的工具集。它把复杂的视觉感知链路封装成简单可靠的接口,让机器人开发能把精力集中在更高层的任务逻辑上。无论是做无人机自动降落、地面机器人巡检,还是研究多模态感知融合,SpireCV 都能提供坚实的基础支撑。
关键词
SpireCV、边缘感知、无人系统、目标检测、相机控制、视频推流、ROS、Jetson、OpenCV、开源SDK、SpireCV、智能感知、算法库、边缘计算、目标跟踪、开源项目
最后
如果你觉得这篇文章对你有帮助,不妨点个赞支持一下!你的支持是我继续分享知识的动力。如果有任何疑问或需要进一步的帮助,欢迎随时留言。
也可以加入微信公众号 [DotNet技术匠] 社区,与其他热爱技术的同行一起交流心得,共同成长!
优秀是一种习惯,欢迎大家留言学习!
