debug
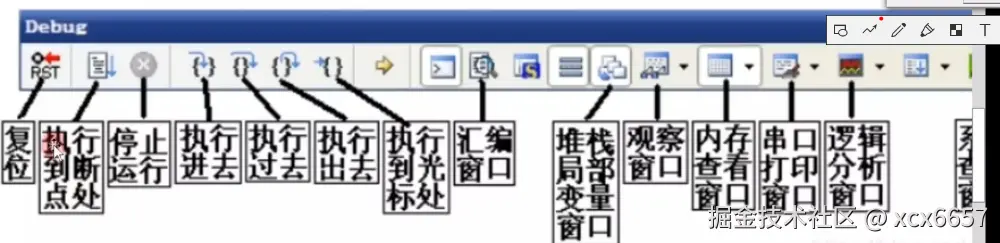
- 蓝色三角形表示光标LINE,黄色三角形表示程序运行到的line,
静态任务创建(推荐动态)
#include "freertos_demo.h"
#define configSUPPORT_STATIC_ALLOCATION 1
volatile int task1_flag=0;
volatile int task2_flag=0;
volatile int task3_flag=0;
volatile int key_flag=0;
#define START_TASK_PRIORITY 1
#define START_TASK_STACK 128
TaskHandle_t start_task_handle ;
StackType_t start_task_stack[START_TASK_STACK];
StaticTask_t start_task_TCB;
void start_task(void * pvParameters);
#define TASK1_PRIORITY 2
#define TASK1_STACK 128
TaskHandle_t task1_handle ;
StackType_t task1_stack[TASK1_STACK];
StaticTask_t task1_TCB;
void task1(void * pvParameters);
#define TASK2_PRIORITY 3
#define TASK2_STACK 128
TaskHandle_t task2_handle ;
StackType_t task2_stack[TASK2_STACK];
StaticTask_t task2_TCB;
void task2(void * pvParameters);
#define TASK3_PRIORITY 4
#define TASK3_STACK 128
TaskHandle_t task3_handle ;
StackType_t task3_stack[TASK3_STACK];
StaticTask_t task3_TCB;
void task3(void * pvParameters);
StaticTask_t idle_task_tcb;
StackType_t idle_task_stack[configMINIMAL_STACK_SIZE];
StaticTask_t timer_task_tcb;
StackType_t timer_task_stack[configTIMER_TASK_STACK_DEPTH];
void vApplicationGetIdleTaskMemory( StaticTask_t ** ppxIdleTaskTCBBuffer,
StackType_t ** ppxIdleTaskStackBuffer,
uint32_t * pulIdleTaskStackSize )
{
* ppxIdleTaskTCBBuffer = &idle_task_tcb;
* ppxIdleTaskStackBuffer = idle_task_stack;
* pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;
}
void vApplicationGetTimerTaskMemory( StaticTask_t **ppxTimerTaskTCBBuffer,
StackType_t **ppxTimerTaskStackBuffer,
uint32_t *pulTimerTaskStackSize )
{
*ppxTimerTaskTCBBuffer=&timer_task_tcb;
*ppxTimerTaskStackBuffer=timer_task_stack;
*pulTimerTaskStackSize=configTIMER_TASK_STACK_DEPTH;
}
void freertos_start(void)
{
start_task_handle=xTaskCreateStatic(
(TaskFunction_t) start_task,
(char *) "start_task",
(uint16_t) START_TASK_STACK,
(void *) NULL,
(UBaseType_t) START_TASK_PRIORITY,
(StackType_t * ) start_task_stack,
(StaticTask_t *) &start_task_TCB ) ;
vTaskStartScheduler();
}
void start_task(void * pvParameters)
{
taskENTER_CRITICAL();
task1_handle=xTaskCreateStatic(
(TaskFunction_t) task1,
(char *) "task1",
(uint16_t) TASK1_STACK,
(void *) NULL,
(UBaseType_t) TASK1_PRIORITY,
(StackType_t * ) task1_stack,
(StaticTask_t *) & task1_TCB ) ;
task2_handle=xTaskCreateStatic(
(TaskFunction_t) task2,
(char *) "task2",
(uint16_t) TASK2_STACK,
(void *) NULL,
(UBaseType_t) TASK2_PRIORITY,
(StackType_t * ) task2_stack,
(StaticTask_t *) & task2_TCB ) ;
task3_handle=xTaskCreateStatic(
(TaskFunction_t) task3,
(char *) "task3",
(uint16_t) TASK3_STACK,
(void *) NULL,
(UBaseType_t) TASK3_PRIORITY,
(StackType_t * ) task3_stack,
(StaticTask_t *) & task3_TCB ) ;
taskEXIT_CRITICAL();
vTaskDelete(NULL);
}
void task1( void * pvParameters )
{
while(1)
{
task1_flag++;
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_0);
vTaskDelay(500);
}
}
void task2( void * pvParameters )
{
while(1)
{
task2_flag++;
HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_5);
vTaskDelay(500);
}
}
void task3( void * pvParameters )
{
while(1)
{
task3_flag++;
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)==0)
{
key_flag++;
if(task1_handle!=NULL)
{
vTaskDelete( task1_handle);
task1_handle=NULL;
}
}
vTaskDelay(500);
}
}
动态
#include "freertos_demo.h"
volatile int task1_flag=0;
volatile int task2_flag=0;
volatile int task3_flag=0;
volatile int key_flag=0;
#define START_TASK_PRIORITY 1
#define START_TASK_STACK 128
TaskHandle_t start_task_handle ;
StackType_t start_task_stack[START_TASK_STACK];
StaticTask_t start_task_TCB;
void start_task(void * pvParameters);
#define TASK1_PRIORITY 2
#define TASK1_STACK 128
TaskHandle_t task1_handle ;
void task1(void * pvParameters);
#define TASK2_PRIORITY 3
#define TASK2_STACK 128
TaskHandle_t task2_handle ;
void task2(void * pvParameters);
#define TASK3_PRIORITY 4
#define TASK3_STACK 128
TaskHandle_t task3_handle ;
void task3(void * pvParameters);
void freertos_start(void)
{
xTaskCreate( (TaskFunction_t) start_task,
(char *) "start_task",
(uint16_t) START_TASK_STACK,
(void *) NULL,
(UBaseType_t) START_TASK_PRIORITY,
(TaskHandle_t * ) &start_task_handle ) ;
}
void start_task(void * pvParameters)
{
taskENTER_CRITICAL();
xTaskCreate(
(TaskFunction_t) task2,
(char *) "task2",
(uint16_t) TASK2_STACK,
(void *) NULL,
(UBaseType_t) TASK2_PRIORITY,
(TaskHandle_t * ) &task2_handle ) ;
xTaskCreate(
(TaskFunction_t) task3,
(char *) "task3",
(uint16_t) TASK3_STACK,
(void *) NULL,
(UBaseType_t) TASK3_PRIORITY,
(TaskHandle_t * ) &task3_handle ) ;
xTaskCreate(
(TaskFunction_t) task1,
(char *) "task1",
(uint16_t) TASK1_STACK,
(void *) NULL,
(UBaseType_t) TASK1_PRIORITY,
(TaskHandle_t * ) &task1_handle ) ;
taskEXIT_CRITICAL();
vTaskDelete(NULL);
}
void task1( void * pvParameters )
{
while(1)
{
task1_flag++;
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_0);
vTaskDelay(500);
}
}
void task2( void * pvParameters )
{
while(1)
{
task2_flag++;
HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_5);
vTaskDelay(500);
}
}
void task3( void * pvParameters )
{
while(1)
{
task3_flag++;
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)==0)
{
key_flag++;
if(task1_handle!=NULL)
{
vTaskDelete( task1_handle);
task1_handle=NULL;
}
}
vTaskDelay(500);
}
}
队列(动态)
#include "freertos_demo.h"
volatile int task1_flag=0;
volatile int task2_flag=0;
volatile int task3_flag=0;
char str[500];
#define START_TASK_PRIORITY 1
#define START_TASK_STACK 128
TaskHandle_t start_task_handle ;
void start_task(void * pvParameters);
#define TASK1_PRIORITY 2
#define TASK1_STACK 128
TaskHandle_t task1_handle ;
void task1(void * pvParameters);
#define TASK2_PRIORITY 3
#define TASK2_STACK 128
TaskHandle_t task2_handle ;
void task2(void * pvParameters);
#define TASK3_PRIORITY 4
#define TASK3_STACK 128
TaskHandle_t task3_handle ;
void task3(void * pvParameters);
QueueHandle_t queue1;
QueueHandle_t big_queue;
void freertos_start(void)
{
queue1=xQueueCreate(2,sizeof(uint8_t));
if(queue1!=NULL)
printf("queue1 create successfully\r\n");
else
printf("queue1 error\r\n");
big_queue=xQueueCreate(1,sizeof(char *));
if(big_queue!=NULL)
printf("big_queue create successfully\r\n");
else
printf("big_queue error\r\n");
xTaskCreate( (TaskFunction_t) start_task,
(char *) "start_task",
(uint16_t) START_TASK_STACK,
(void *) NULL,
(UBaseType_t) START_TASK_PRIORITY,
(TaskHandle_t * ) &start_task_handle ) ;
vTaskStartScheduler();
}
void start_task(void * pvParameters)
{
taskENTER_CRITICAL();
if(xTaskCreate(
(TaskFunction_t) task1,
(char *) "task1",
(uint16_t) TASK1_STACK,
(void *) NULL,
(UBaseType_t) TASK1_PRIORITY,
(TaskHandle_t * ) &task1_handle ) != pdPASS)
printf("Failed to create task1\r\n");
if(xTaskCreate(
(TaskFunction_t) task2,
(char *) "task2",
(uint16_t) TASK2_STACK,
(void *) NULL,
(UBaseType_t) TASK2_PRIORITY,
(TaskHandle_t * ) &task2_handle ) != pdPASS)
printf("Failed to create task2\r\n");
if(xTaskCreate(
(TaskFunction_t) task3,
(char *) "task3",
(uint16_t) TASK3_STACK,
(void *) NULL,
(UBaseType_t) TASK3_PRIORITY,
(TaskHandle_t * ) &task3_handle ) != pdPASS)
printf("Failed to create task3\r\n");
taskEXIT_CRITICAL();
vTaskDelete(NULL);
}
void task1( void * pvParameters )
{
uint8_t key_value=0;
BaseType_t que_retn;
char * big_data=" abcdefghigklmnopq ";
while(1)
{
task1_flag++;
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)==0)
{
key_value=1;
printf("key1 down\r\n");
}
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_2)==0)
{
key_value=2;
printf("key2 down\r\n");
}
if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1)==0)
{
key_value=3;
printf("key3 down\r\n");
}
if(key_value==1||key_value==2)
{
que_retn=xQueueSend(queue1, &key_value, portMAX_DELAY);
if(que_retn==1)
printf("successed in sending kv:%d to queue1\r\n",key_value);
else
printf("failed to send queue1!!\r\n");
}
else if(key_value==3)
{
que_retn=xQueueSend(big_queue,&big_data,portMAX_DELAY);
if(que_retn==1)
printf("successed in sending data to big_queue\r\n");
else
printf("failed to send big_queue!!\r\n");
}
vTaskDelay(100);
}
}
void task2( void * pvParameters )
{
uint8_t r2_data=0;
BaseType_t r2_que=0;
while(1)
{
r2_que=xQueueReceive(queue1 ,&r2_data,portMAX_DELAY);
if(r2_que==pdTRUE)
printf("task2 receive data:%d from queue1\r\n",r2_data);
else
printf("failed receive data from queue1!!\r\n");
}
}
void task3( void * pvParameters )
{
BaseType_t r3_que=0;
char * r3_data;
task3_flag++;
while(1)
{
r3_que=xQueueReceive(big_queue ,&r3_data,portMAX_DELAY);
if(r3_que==pdTRUE)
printf("big_data:%s \r\n",r3_data);
else if(r3_que==pdFALSE)
printf("failed receive data from bigqueue!!\r\n");
}
}
内存管理
#include "freertos_demo.h"
volatile uint8_t key1_flag;
volatile uint8_t key2_flag;
#define START_TASK_PRIORITY 1
#define START_TASK_STACK 128
TaskHandle_t start_task_handle ;
void start_task(void * pvParameters);
#define TASK1_PRIORITY 2
#define TASK1_STACK 128
TaskHandle_t task1_handle ;
void task1(void * pvParameters);
void freertos_start(void)
{
xTaskCreate( (TaskFunction_t) start_task,
(char *) "start_task",
(uint16_t) START_TASK_STACK,
(void *) NULL,
(UBaseType_t) START_TASK_PRIORITY,
(TaskHandle_t * ) &start_task_handle ) ;
vTaskStartScheduler();
}
void start_task(void * pvParameters)
{
taskENTER_CRITICAL();
if(xTaskCreate(
(TaskFunction_t) task1,
(char *) "task1",
(uint16_t) TASK1_STACK,
(void *) NULL,
(UBaseType_t) TASK1_PRIORITY,
(TaskHandle_t * ) &task1_handle ) != pdPASS)
printf("Failed to create task1 \r\n");
taskEXIT_CRITICAL();
vTaskDelete(NULL);
}
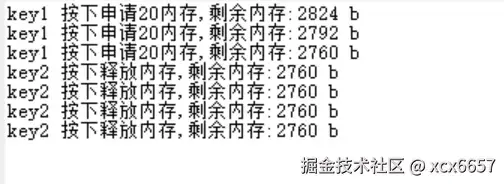
void task1( void * pvParameters )
{
void *buff;
while(1)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)==0)
{
key1_flag++;
buff=pvPortMalloc(20);
printf("key1 按下申请20内存,剩余内存:%d b\r\n",xPortGetFreeHeapSize());
}
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_2)==0)
{
key2_flag++;
vPortFree(buff);
printf("key2 按下释放内存,剩余内存:%d b\r\n",xPortGetFreeHeapSize());
}
vTaskDelay(500);
}
}
内存管理改正版本
#include "freertos_demo.h"
volatile uint8_t key1_flag;
volatile uint8_t key2_flag;
#define START_TASK_PRIORITY 1
#define START_TASK_STACK 128
TaskHandle_t start_task_handle ;
void start_task(void * pvParameters);
#define TASK1_PRIORITY 2
#define TASK1_STACK 128
TaskHandle_t task1_handle ;
void task1(void * pvParameters);
#define MAX_ALLOCATIONS 10
void *allocated_buffers[MAX_ALLOCATIONS];
uint8_t allocation_count = 0;
void freertos_start(void)
{
xTaskCreate( (TaskFunction_t) start_task,
(char *) "start_task",
(uint16_t) START_TASK_STACK,
(void *) NULL,
(UBaseType_t) START_TASK_PRIORITY,
(TaskHandle_t * ) &start_task_handle ) ;
vTaskStartScheduler();
}
void start_task(void * pvParameters)
{
taskENTER_CRITICAL();
if(xTaskCreate(
(TaskFunction_t) task1,
(char *) "task1",
(uint16_t) TASK1_STACK,
(void *) NULL,
(UBaseType_t) TASK1_PRIORITY,
(TaskHandle_t * ) &task1_handle ) != pdPASS)
printf("Failed to create task1 \r\n");
taskEXIT_CRITICAL();
vTaskDelete(NULL);
}
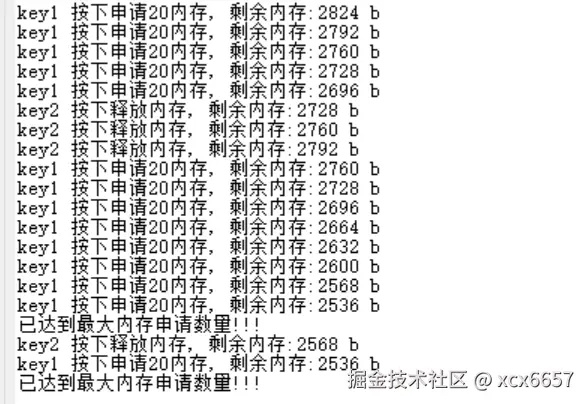
void task1( void * pvParameters )
{
void *buff;
uint8_t count=0;
while(1)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)==0)
{
key1_flag++;
if (allocation_count < MAX_ALLOCATIONS)
{
buff = pvPortMalloc(20);
if (buff != NULL)
{
allocated_buffers[allocation_count] = buff;
allocation_count++;
printf("key1 按下申请20内存, 剩余内存:%d b\r\n", xPortGetFreeHeapSize());
}
else
printf("内存申请失败!!!\r\n");
}
else
printf("已达到最大内存申请数量!!!\r\n");
}
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_2)==0)
{
key2_flag++;
if (allocation_count > 0) {
allocation_count--;
vPortFree(allocated_buffers[allocation_count]);
allocated_buffers[allocation_count] = NULL;
printf("key2 按下释放内存, 剩余内存:%d b\r\n", xPortGetFreeHeapSize());
}
else
{
printf("没有可释放的内存\r\n");
}
}
vTaskDelay(500);
}
}
延时函数
void delay_us(uint32_t delay_us)
{
volatile unsigned int num;
volatile unsigned int t;
for (num = 0; num < delay_us; num++)
{
t = 11;
while (t != 0)
{
t--;
}
}
}
void delay_ms(uint16_t delay_ms)
{
volatile unsigned int num;
for (num = 0; num < delay_ms; num++)
{
delay_us(1000);
}
}
bug


