

二·数据传输:
1.I2C原理在上一篇博客里有详细讲解,在这里不再赘述。
如果要写 MPU-60X0 寄存器,主设备除了发出开始标志(S)和地址位,还要加一个 R/W 位,0 为写,1 为读。在第 9 个时钟周期(高电平时),MPU-60X0 产生应答信号。然 后主设备开始传送寄存器地址(RA),接到应答后,开始传送寄存器数据,然后仍然要有应 答信号,依次类推。
单字节写时序:
多字节写时序:
如果要读取 MPU-60X0 寄存器的值,首先由主设备产生开始信号(S),然后发送从设 备地址位和一个写数据位,然后发送寄存器地址,才能开始读寄存器。紧接着,收到应答信 号后,主设备再发一个开始信号,然后发送从设备地址位和一个读数据位。然后,作为从设 备的 MPU-60X0 产生应答信号并开始发送寄存器数据。通信以主设备产生的拒绝应答信号 (NACK)和结束标志(P)结束。拒绝应答信号(NACK)产生定义为 SDA 数据在第 9 个 时钟周期一直为高。
三·STM32控制MPU6050
1.硬件连接
实验采用正点原子公司的 AN1507 ATK-MPU6050 六轴传感器模块
MPU6050 STM32
VCC <---> VCC
GND <---> GND
SDA <---> PB9
SCL <---> PB8
INT <---> 不接
AD0 <---> 不接
2. 重要寄存器
2.1 电源管理寄存器 1
DEVICE_RESET 位用来控制复位,设置为 1,复位 MPU6050,复位结束后, MPU
硬件自动清零该位
SLEEEP 位用于控制 MPU6050 的工作模式,复位后,该位为 1,即进
入了睡眠模式(低功耗),所以我们要清零该位,以进入正常工作模式
TEMP_DIS 用于设置是否使能温度传感器,设置为 0,则使能
CLKSEL[2:0]用于选择系统时钟源,选择关系如表
| CLKSEL[2:0] | 时钟源 |
|---|---|
| 000 | 内部 8M RC 晶振 |
| 001 | PLL,使用 X 轴陀螺作为参考 |
| 010 | PLL,使用 Y 轴陀螺作为参考 |
| 011 | PLL,使用 Z 轴陀螺作为参考 |
| 100 | PLL,使用外部 32.768Khz 作为参考 |
| 101 | PLL,使用外部 19.2Mhz 作为参考 |
| 110 | 保留 |
| 111 | 关闭时钟,保持时序产生电路复位状态 |
**默认是使用内部 8M RC 晶振的,精度不高,所以我们一般选择 X/Y/Z 轴陀螺作为参考
的 PLL 作为时钟源,一般设置 CLKSEL=001 即可**
2.2 陀螺仪配置寄存器
FS_SEL[1:0]这两个位,用于设置陀螺仪的满量程范围: 0,±250°
/S; 1,±500° /S; 2,±1000° /S; 3,±2000° /S;我们一般设置为 3,即±2000° /S,因
为陀螺仪的 ADC 为 16 位分辨率,所以得到灵敏度为: 65536/4000=16.4LSB/(° /S)
2.3 加速度传感器配置寄存器
AFS_SEL[1:0]这两个位,用于设置加速度传感器的满量程范围: 0,
±2g; 1,±4g; 2,±8g; 3,±16g;我们一般设置为 0,即±2g,因为加速度传感器的
ADC 也是 16 位,所以得到灵敏度为: 65536/4=16384LSB/g
2.4 FIFO使能寄存器
该寄存器用于控制 FIFO 使能,在简单读取传感器数据的时候,可以不用 FIFO,设置
对应位为 0 即可禁止 FIFO,设置为 1,则使能 FIFO
加速度传感器的 3 个轴,全由 1
个位( ACCEL_FIFO_EN)控制,只要该位置 1,则加速度传感器的三个通道都开启 FIFO
2.5 陀螺仪采样率分频寄存器
该寄存器用于设置 MPU6050 的陀螺仪采样频率,计算公式为:
采样频率 = 陀螺仪输出频率 / (1+SMPLRT_DIV)
这里陀螺仪的输出频率,是 1Khz 或者 8Khz,与数字低通滤波器( DLPF)的设置有关,
当 DLPF_CFG=0/7 的时候,频率为 8Khz,其他情况是 1Khz。而且 DLPF 滤波频率一般设置
为采样率的一半。采样率,我们假定设置为 50Hz,那么 SMPLRT_DIV=1000/50-1=19
2.6 配置寄存器
数字低通滤波器( DLPF)的设置位,即: DLPF_CFG[2:0],加速
度计和陀螺仪,都是根据这三个位的配置进行过滤的。 DLPF_CFG 不同配置对应的过滤情
况如表:
这里的加速度传感器,输出速率( Fs)固定是 1Khz,而角速度传感器的输出速率( Fs),
则根据 DLPF_CFG 的配置有所不同。一般我们设置角速度传感器的带宽为其采样率的一半,
如前面所说的,如果设置采样率为 50Hz,那么带宽就应该设置为 25Hz,取近似值 20Hz,
就应该设置 DLPF_CFG=100
2.7 电源管理寄存器 2
LP_WAKE_CTRL 用于控制低功耗时的唤醒频率
剩下的 6 位,分别控制加速度和陀螺仪的x/y/z轴是否进入待机模式,这里我们全部都不进入待机模式,所以全部设置为 0 即可
2.8 陀螺仪数据输出寄存器
通过读取这6个寄存器,就可以读到陀螺仪 x/y/z 轴的值,比如 x 轴的数据,可以通过读取
0X43(高 8 位)和 0X44(低 8 位)寄存器得到,其他轴以此类推
2.9 加速度传感器数据输出寄存器
通过读取这6个寄存器,就可以读到加速度传感器 x/y/z 轴的值,比如读 x 轴的数据,可以通过读取 0X3B(高 8 位)和0X3C(低8位)寄存器得到,其他轴以此类推
2.10 温度传感器数据输出寄存器
温度传感器的值,可以通过读取 0X41(高 8 位)和 0X42(低 8 位)寄存器得到,
温度换算公式为:
Temperature = 36.53 + regval/340
其中, Temperature 为计算得到的温度值,单位为℃, regval 为从 0X41 和 0X42 读到的
温度传感器值
2.11 中断使能寄存器
OT_EN 该位置 1,该位使能运动检测(Motiondetection)产生中断。
FIFO_OFLOW_EN该位置1,该位使能FIFO缓冲区溢出产生中断。
I2C_MST_INT_EN该位置1,该位使能I2C主机所有中断源产生中断。
DATA_RDY_EN 该位置 1,该位使能数据就绪中断( Data Ready interrupt),所有的传感器寄存器写操作完成时都会产生
关闭所有中断则给此寄存器赋值0X00
3. 软件驱动
3.1 通过IIC对MPU6050寄存器进行读写
//IIC写一个字节
//reg: 寄存器地址
//data: 数据
//返回值: 0,正常
// 其他,错误代码
u8 IIC\_Write\_Byte(u8 reg,u8 data)
{
IIC\_Start();
IIC\_Send\_Byte((MPU\_ADDR<<1)|0);//发送器件地址+写命令
if(IIC\_Wait\_Ack()) //等待应答
{
IIC\_Stop();
return 1;
}
IIC\_Send\_Byte(reg); //写寄存器地址
IIC\_Wait\_Ack(); //等待应答
IIC\_Send\_Byte(data);//发送数据
if(IIC\_Wait\_Ack()) //等待ACK
{
IIC\_Stop();
return 1;
}
IIC\_Stop();
return 0;
}
//IIC读一个字节
//reg:寄存器地址
//返回值:读到的数据
u8 IIC\_Read\_Byte(u8 reg)
{
u8 res;
IIC\_Start();
IIC\_Send\_Byte((MPU\_ADDR<<1)|0);//发送器件地址+写命令
IIC\_Wait\_Ack();//等待应答
IIC\_Send\_Byte(reg);//写寄存器地址
IIC\_Wait\_Ack();//等待应答
IIC\_Start();
IIC\_Send\_Byte((MPU\_ADDR<<1)|1);//发送期间地址+读命令
IIC\_Wait\_Ack();//等待应答
res=IIC\_Read\_Byte(0);//读取数据,发送nACK
IIC\_Stop();//产生一个停止条件
return res;
}
//IIC连续写
//addr:器件地址
//reg: 寄存器地址
//len: 写入长度
//buf: 数据区
//返回值: 0,正常
// 其他,错误代码
u8 IIC\_Write\_Len(u8 addr,u8 reg,u8 len,u8 \*buf)
{
u8 i;
IIC\_Start();
IIC\_Send\_Byte((addr<<1)|0);//发送器件地址+写命令
if(IIC\_Wait\_Ack())//等待应答
{
IIC\_Stop();
return 1;
}
IIC\_Send\_Byte(reg);//写寄存器地址
IIC\_Wait\_Ack();//等待应答
for(i=0;i<len;i++)
{
IIC\_Send\_Byte(buf[i]);//发送数据
if(IIC\_Wait\_Ack())//等待ACK
{
IIC\_Stop();
return 1;
}
}
IIC\_Stop();
return 0;
}
//IIC连续读
//addr:器件地址
//reg:要读取的寄存器地址
//len:要读取得长度
//buf:读取到的数据存储区
//返回值: 0,正常
// 其他,错误代码
u8 IIC\_Read\_Len(u8 addr,u8 reg,u8 len,u8 \*buf)
{
IIC\_Start();
IIC\_Send\_Byte((addr<<1)|0);//发送器件地址+写命令
if(IIC\_Wait\_Ack())//等待应答
{
IIC\_Stop();
return 1;
}
IIC\_Send\_Byte(reg);//写寄存器地址
IIC\_Wait\_Ack();//等待应答
IIC\_Start();
IIC\_Send\_Byte((addr<<1)|1);//发送器件地址+读命令
IIC\_Wait\_Ack();//等待应答
while(len)
{
if(len==1) \*buf=IIC\_Read\_Byte(0);//读数据,发送nACK
else \*buf=IIC\_Read\_Byte(1);//读数据,发送ACK
len--;
buf++;
}
IIC\_Stop();//产生一个停止条件
return 0;
}
3.2 MPU6050初始化
//初始化MPU6050
//返回值: 0,成功
// 其他,错误代码
u8 MPU\_Init(void)
{
u8 res;
IIC\_Init();//初始化IIC总线
IIC\_Write\_Byte(MPU\_PWR\_MGMT1\_REG,0X80);//复位MPU6050
delay\_ms(100);
IIC\_Write\_Byte(MPU\_PWR\_MGMT1\_REG,0X00);//唤醒MPU6050
MPU\_Set\_Gyro\_Fsr(3); //陀螺仪传感器,±2000dps
MPU\_Set\_Accel\_Fsr(0); //加速度传感器 ±2g
MPU\_Set\_Rate(50); //设置采样率50HZ
IIC\_Write\_Byte(MPU\_INT\_EN\_REG,0X00); //关闭所有中断
IIC\_Write\_Byte(MPU\_USER\_CTRL\_REG,0X00);//I2C主模式关闭
IIC\_Write\_Byte(MPU\_FIFO\_EN\_REG,0X00);//关闭FIFO
IIC\_Write\_Byte(MPU\_INTBP\_CFG\_REG,0X80);//INT引脚低电平有效
res=IIC\_Read\_Byte(MPU\_DEVICE\_ID\_REG);
if(res==MPU\_ADDR)//器件ID正确
{
IIC\_Write\_Byte(MPU\_PWR\_MGMT1\_REG,0X01);//设置CLKSEL,PLL X 轴为参考
IIC\_Write\_Byte(MPU\_PWR\_MGMT2\_REG,0X00);//加速度陀螺仪都工作
MPU\_Set\_Rate(50); //设置采样率为50HZ
}else return 1;
return 0;
**收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。**
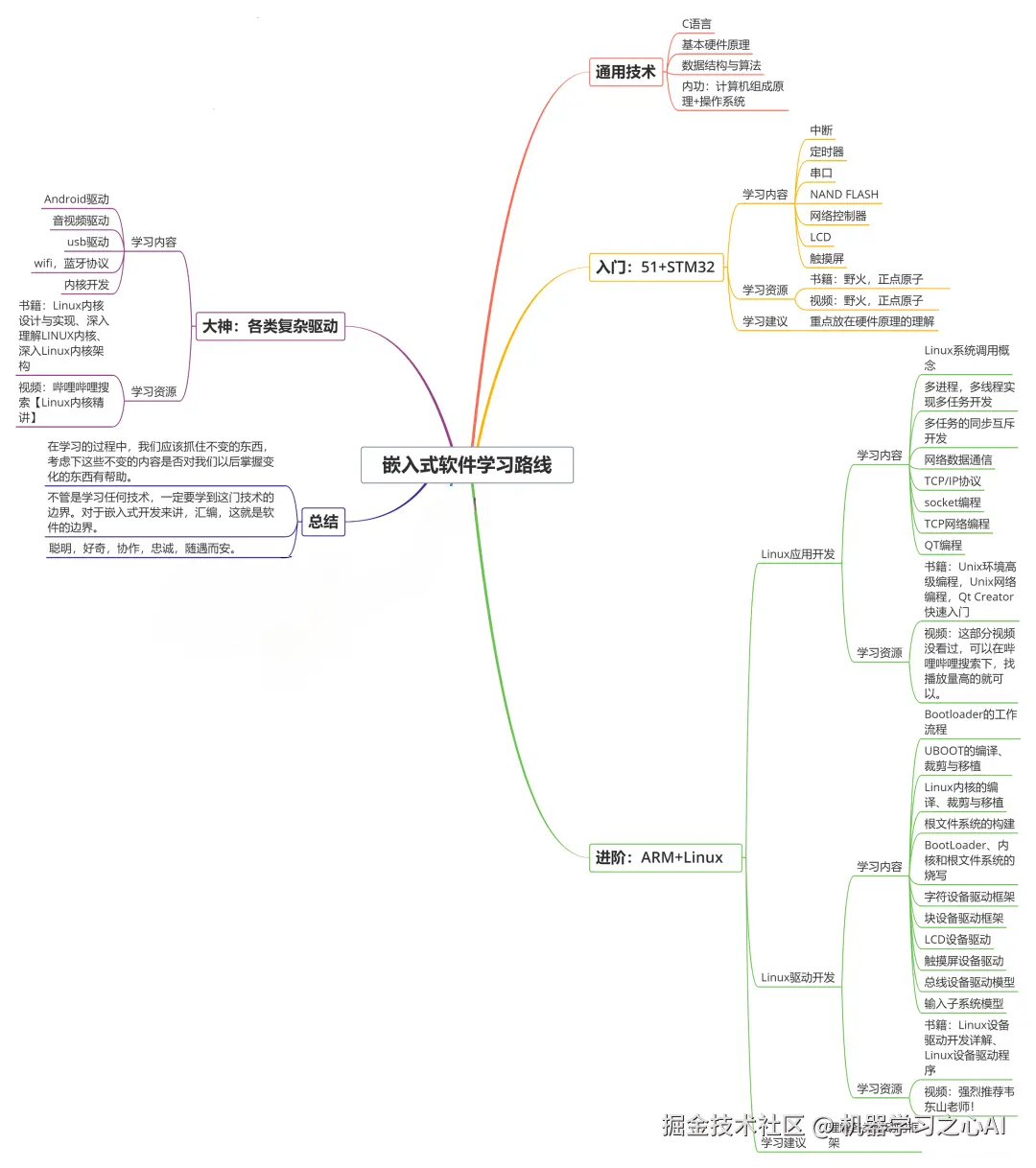
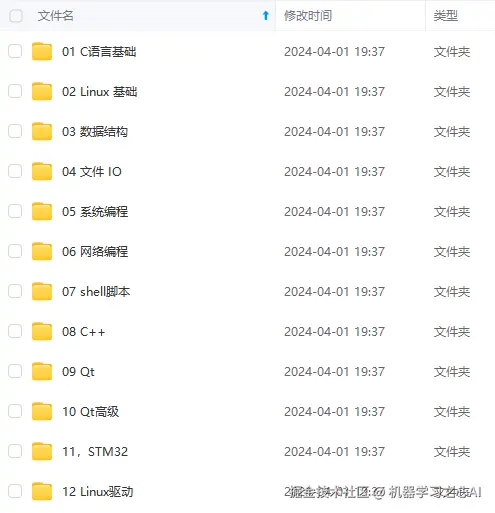
**[如果你需要这些资料,可以戳这里获取](https://gitee.com/vip204888)**
**一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人**
**都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!**
