阅读翻译Mathematics for Machine Learning之2.8 Affine Subspaces
关于:
- 首次发表日期:2024-07-24
- Mathematics for Machine Learning官方链接: mml-book.com
- ChatGPT和KIMI机翻,人工润色
- 非数学专业,如有错误,请不吝指出
2.8 仿射空间
接下来,我们将更详细地考察从原点偏移的空间,即不再是向量子空间的空间。此外,我们还将简要讨论这些仿射空间之间映射的性质,这些映射类似于线性映射。
备注。在机器学习文献中,线性和仿射之间的区别有时并不明确,以至于我们可以发现将仿射空间/映射称为线性空间/映射的参考文献。
2.8.1 仿射空间
定义 2.25(仿射子空间)。设 V 为一个向量空间,x0∈V,U⊆V 为一个子空间。那么子集
L=x0+U:={x0+u:u∈U}={v∈V∣∃u∈U:v=x0+u}⊆V(2.130a)(2.130b)
称为 V 的仿射子空间或线性流形(linear manifold)。U 称为方向或方向空间(direction space),x0 称为支点(support point)。在第12章中,我们将这种子空间称为超平面。
注意,如果 x0∈/U,则仿射子空间的定义排除了 0。因此,对于 x0∈/U,仿射子空间不是 V 的(线性)子空间(向量子空间)。
仿射子空间的例子有 R3 中的点、线和平面,这些点、线和平面不(一定)通过原点。
备注。考虑向量空间 V 的两个仿射子空间 L=x0+U 和 L~=x~0+U~。当且仅当 U⊆U~ 且 x0−x~0∈U~ 时,L⊆L~。
仿射子空间通常由参数描述:考虑一个 V 的 k 维仿射空间 L=x0+U。如果 (b1,…,bk) 是 U 的一个有序基,那么每个元素 x∈L 都可以唯一地描述为
x=x0+λ1b1+…+λkbk,(2.131)
其中 λ1,…,λk∈R。这种表示称为具有方向向量 b1,…,bk 和参数 λ1,…,λk 的 L 的参数方程。
**例 2.26(仿射子空间)**
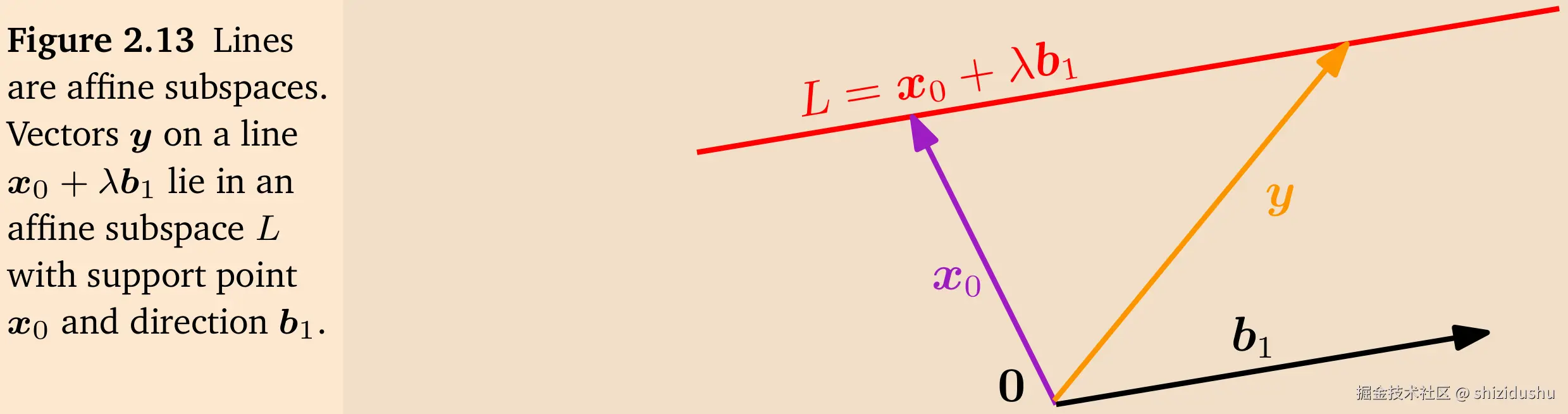
- 一维仿射子空间称为直线,可以写作 y=x0+λb1,其中 λ∈R,U=span[b1]⊆Rn 是 Rn 的一维子空间。这意味着直线由一个支点 x0 和一个定义方向的向量 b1 定义。参见图 2.13 了解示意图。
- Rn 的二维仿射子空间称为平面。平面的参数方程为 y=x0+λ1b1+λ2b2,其中 λ1,λ2∈R,U=span[b1,b2]⊆Rn。这意味着平面由一个支点 x0 和两个线性独立的向量 b1,b2 定义,这两个向量张成方向空间(span the direction space)。
- 在 Rn 中,(n−1) 维仿射子空间被称为超平面,相应的参数方程为 y=x0+∑i=1n−1λibi,其中 b1,…,bn−1 构成 Rn 的一个 (n−1) 维子空间 U 的基。这意味着超平面由一个支点 x0 和 (n−1) 个线性独立的向量 b1,…,bn−1 定义,这些向量张成方向空间。在 R2 中,直线也是超平面。在 R3 中,平面也是超平面。
备注(非齐次线性方程组和仿射子空间)。对于 A∈Rm×n 和 x∈Rm,线性方程组 Aλ=x 的解要么是空集,要么是 Rn 中维度为 n−rk(A) 的仿射子空间。特别地,当 (λ1,…,λn)=(0,…,0) 时,线性方程 λ1b1+…+λnbn=x 的解是 Rn 中的一个超平面。
在 Rn 中,每个 k 维仿射子空间都是非齐次线性方程组 Ax=b 的解,其中 A∈Rm×n,b∈Rm 并且 rk(A)=n−k。回想一下,对于齐次方程组 Ax=0,解是一个向量子空间,我们也可以将其视为一个特殊的仿射空间,其支点为 x0=0。
2.8.2 仿射映射
类似于我们在 2.7 节讨论的向量空间之间的线性映射,我们可以在两个仿射空间之间定义仿射映射。线性映射和仿射映射密切相关。因此,我们从线性映射中已经知道的许多性质,例如线性映射的复合(composition)是一个线性映射,也适用于仿射映射。
定义 2.26(仿射映射)。对于两个向量空间 V,W,一个线性映射 Φ:V→W,以及 a∈W,映射
ϕ:Vx→W↦a+Φ(x)(2.132)(2.133)
是从 V 到 W 的仿射映射。向量 a 被称为 ϕ 的平移向量。
- 每一个仿射映射 ϕ:V→W 也是线性映射 Φ:V→W 和 W 中的平移 τ:W→W 的复合,使得 ϕ=τ∘Φ。映射 Φ 和 τ 是唯一确定的(uniquely determined)。
- 仿射映射 ϕ:V→W,ϕ′:W→X 的复合 ϕ′∘ϕ 是仿射的。
- 如果 ϕ 是双射的,仿射映射保持几何结构不变。它们还保留维度和平行性。


