

####霍夫直线检测的作用——计算得到输入图像(一般是二值化的边缘检测结果图像)中包含的所有直线的数目与位置
- 在取得
图像边缘的基础上, 对一些特定的几何形状边缘,如直线、圆,通过图像霍夫变换把图像从平面坐标空间变换到霍夫坐标空间, 就可以通过求取霍夫空间的局部极大值方法(其实就是霍夫空间中的曲线交集点), 得到极坐标空间对应参数方程中直线的两个参数(r,θ), 从而计算得到边缘图像中的所有直线(基于平面坐标)的数目与位置。
假设有一条直线如下图:
(红色部分是计算过程,递等到右下角的结果,待会儿要用)
在笛卡儿平面坐标系统中的斜率参数与截距参数为(k,b);
若变换到
极坐标空间则变成求取另外两个参数(r,θ),r 和 θ之间的关系可以表示为: (公式的来源运算过程见上图)
对于```每个平面空间的像素点坐标(x,y)```, 随着```角度θ```的取值不同,都会```得到r值```, **(%+++%要点.B)而对于```任意一条直线```来说,在```极坐标空间```它的```(r,θ)```都是```固定不变的```,** 则对于```边缘图像```的```每个平面空间坐标点```可绘制```极坐标的曲线```如图所示: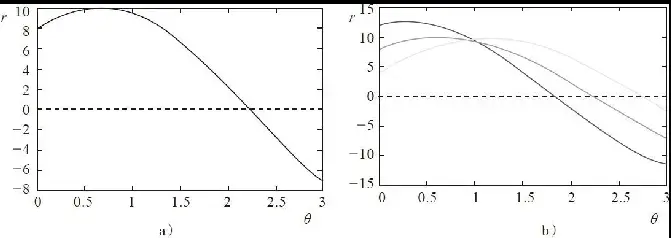 >- 上图中,
左侧是```一个```平面空间的```像素点```, 基于公式```r = x * cosθ + y * sinθ```, 通过给定不同的```θ```值,得到唯一对应```r```值, 无数个```(r,θ)```数对构成的```一道极坐标曲线```;
右侧是```三个```平面空间的```像素点```, 基于公式```r = x * cosθ + y * sinθ```, 通过给定不同的```θ```值,得到唯一对应```r```值, 无数个```(r,θ)```数对构成的```三道极坐标曲线```;
>- 无论截图的左侧还是右侧,都是所谓 ```霍夫空间的一部分```,所谓**```霍夫空间```**,如下图:**[图片参考于此博文](https://www.cnblogs.com/cheermyang/p/5348820.html)**
>--- >#####霍夫空间 概念详析 >**```霍夫空间```**就是一个基于(r,θ)两个参数坐标轴的数据空间, ```数量级规模```是可以是```一个边缘图像```的```像素点数量```;
并且这个空间包括了**```这样的一系列曲线 :```** 一个**```边缘图像```**的**```所有(all & each,假设为 N 个)像素点(x,y)```**, 基于**公式```r = x * cosθ + y * sinθ```,** 通过给定不同的**```θ```**值,得到唯一对应**```r```**值, 无数个**```(r,θ)```**数对构成对应上 **```N个 像素点```**的 **``` N 道 极坐标曲线(霍夫空间的曲线)```**; >--- >#####霍夫直线检测 的 知识要点 >- **(要点.A)** 输入的边缘图像中的每一个像素点``` 一 一 对 应```一条```霍夫空间(or 极坐标参数)曲线```;
>- **(要点.B) 而对于```边缘图像中的 任意一条直线```来说,在```极坐标空间```它的```(r,θ)```都是```固定不变的```,**
>- **(由上可得 要点.C)** **霍夫空间中的一个```交集点(若干曲线的交点(r,θ))``` 就是一条```直线```(点的参数(r,θ)可变换成直线);** >- 而重叠在这个```交集点```上的```霍夫(极坐标)曲线集```, 其实就是```该交集点```代表的```(存在边缘图像中 的 对应的)直线``` ```所包含的(像素)点集```;
>- **(要点.D)** ```交集点```上```累积的曲线```越```多```; ```对应(平面坐标系的边缘图像上的)直线```所包含的```像素点集```就越```多```; 也即```对应直线```的```长度```越```大```; >--- >#####霍夫直线检测 从二值化.边缘检测.结果图像到检测绘制出直线 的大概步骤 >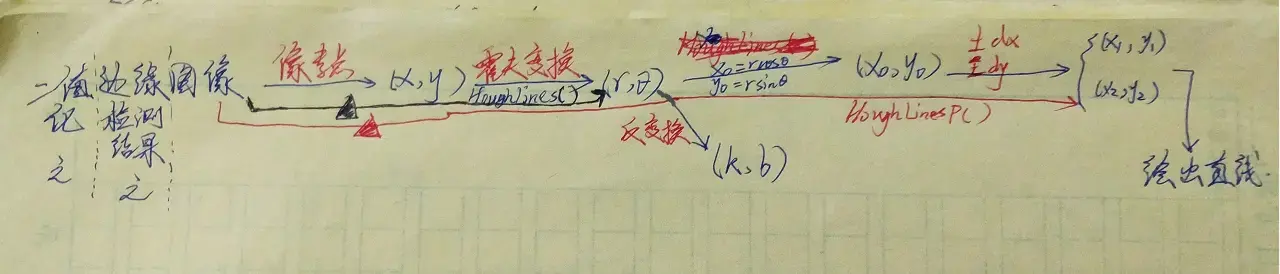
以上引用框中的内容是个人的梳理总结,下面继续读书笔记的内容。
- 由在平面空间
同属于一条直线的像素点绘制出来的曲线必然会相交于一点(上方截图的b)右侧所示的曲线), - 而这个点正是
存在边缘对象中的对应的直线在极坐标空间中的参数方程的参数, 这样就在极坐标空间找到了直线的参数方程,反变换回到平面坐标空间就可以求得直线的两个参数(k,b), 得到直线位置, 而它们在极坐标的交点就是直线在霍夫空间的表达, 直线越长,其在霍夫空间这个点的累积值就越高,相对的灰度值也就越(亮)。
OpenCV关于霍夫直线变换提供了两个相关API函数,
一个是在霍夫空间求取直线两个极坐标的参数,
需要开发者自己转换到平面坐标空间计算直线;
另外一个则会直接返回平面空间直线/线段的两个点坐标信息。
返回极坐标参数的API函数如下:
HoughLines(Mat image, Mat lines, double rho, double theta, int threshold)image:表示输入图像,8位单通道图像,一般为二值图像。lines:表示输出的每个直线的极坐标参数方程的两个参数。rho:表示极坐标空间r值每次的步长,一般设置为1。theta:表示角度θ,每次移动1°即可。threshold:表示霍夫空间中该点的累积数, 该累积数越大,则得到的直线可能就越长, 取值范围通常为30~50,单位是像素, 假设为30的话,则表示大于30个像素长度的线段才会被检测到。
threshold解释中所述的累积数可以看做我们数据处理中的投票机制,票数大于threshold的交集点(即累积的曲线数大于threshold的交集点), 才认定是有效直线, 才能被函数检测到并提取出来用于返回/变换并绘制成直线;
使用该API实现直线检测:
private void houghLinesDemo(Mat src, Mat dst) {
Mat edges = new Mat();
Imgproc.Canny(src, edges, 50, 150, 3, true);
Mat lines = new Mat();
Imgproc.HoughLines(edges, lines, 1,Math.PI/180.0, 200);
Mat out = Mat.zeros(src.size(), src.type());
float[] data = new float[2];
for(int i=0; i<lines.rows(); i++) {
lines.get(i, 0, data);
float rho = data[0], theta = data[1];
double a = Math.cos(theta), b = Math.sin(theta);
double x0 = a*rho, y0 = b*rho;
Point pt1 = new Point();
Point pt2 = new Point();
pt1.x = Math.round(x0 + 100*(-b));//!!!!!!!!!!!!!!!!!
pt1.y = Math.round(y0 + 100*(a));
pt2.x = Math.round(x0 - 100*(-b));
pt2.y = Math.round(y0 - 100*(a));
Imgproc.line(out, pt1, pt2, new Scalar(0,0,255), 3, Imgproc.LINE_AA, 0);
}
out.copyTo(dst);
out.release();
edges.release();
}
关于pt1.x = Math.round(x0 + 100*(-b));这一行代码,
- 关于参数100的意义,可参考 原作者博文: x0与y0是直线上的点,100是表示对该点到直线上分别向前后延长的距离;
在实际效果图中(下方结果图源程序用的原图是
lena),这个100偏移量,决定的就是这些生成直线的长度:- 关于 Math.round()函数
- 关于 Imgproc.HoughLines() 与 Imgproc.HoughLinesP() 的 区别 以及 lines 参数位 的意义详析
以上的这个API函数需要对得到的每对极坐标参数(r,θ)做计算,
使其变换到平面空间(x0 = r * cosθ ; y0 = r * sinθ),
接着通过对x0和y0添加偏移量并进行计算,得到直线的两个点;
然后绘制直线。
另外一个API函数则比较简单,
它省去了开发者自己把极坐标变换为直线坐标的过程,
直接返回每个线段/直线对应的两个点坐标,
其API函数与参数的解释具体如下:
HoughLinesP(Mat image, Mat lines, double rho, double theta, int threshold, double minLineLength, double maxLineGap)image:表示输入图像,8位单通道图像,一般为二值图像。lines:表示输出的每个直线最终要绘制用的两个 平面坐标系参数。rho:表示极坐标空间r值每次的步长,一般设置为1。theta:表示角度θ,每次移动1°即可。threshold:表示极坐标中该点的累积数,该累积数越大,则得到的直线可能就越长,取值范围通常为30~50,单位是像素,假设取值为30,则表示大于30个像素长度的线段才会被检测到。minLineLength:表示可以检测的最小线段长度,根据实际需要进行设置。maxLineGap:表示线段之间的最大间隔像素,假设5表示小于5个像素的两个相邻线段可以连接起来。
使用该API实现图像直线检测:
private void houghLinePDemo(Mat src, Mat dst) {
Mat edges = new Mat();
Imgproc.Canny(src, edges, 50, 150, 3, true);
Mat lines = new Mat();
Imgproc.HoughLinesP(edges, lines, 1, Math.PI/180.0, 100, 50, 10);
Mat out = Mat.zeros(src.size(), src.type());
for(int i=0; i<lines.rows(); i++) {
int[] oneline = new int[4];
lines.get(i, 0, oneline);
Imgproc.line(out, new Point(oneline[0], oneline[1]),
new Point(oneline[2], oneline[3]),
new Scalar(0, 0, 255), 2, 8, 0);
}
out.copyTo(dst);
// 释放内存
out.release();
edges.release();
}
- 这里需要注意的是,
图像二值化与边缘检测算法输出结果的质量在**很大程度上影响 霍夫直线变换的结果**, 同时在使用HoughLinesP的时候,最后两个参数的设置也会影响霍夫直线检测的结果。
--- ##### 参考材料
