Application
- stock market forecast
- self-driving car
- recommendation
Step 1: Model
Linear model: y=b+∑iwixi
Step 2: Goodness of Function
Loss function L
Input: a function
Output: how bad it is
L(f)=L(w,b)=i∑(y^n−(b+i∑wixin))2
Regularization
L(f)=L(w,b)=i∑(y^n−(b+i∑wixin))2+λi∑(wi)2
- smooth functions are preferred (smaller wi -> smaller change when x changes) - not sensitive to noise
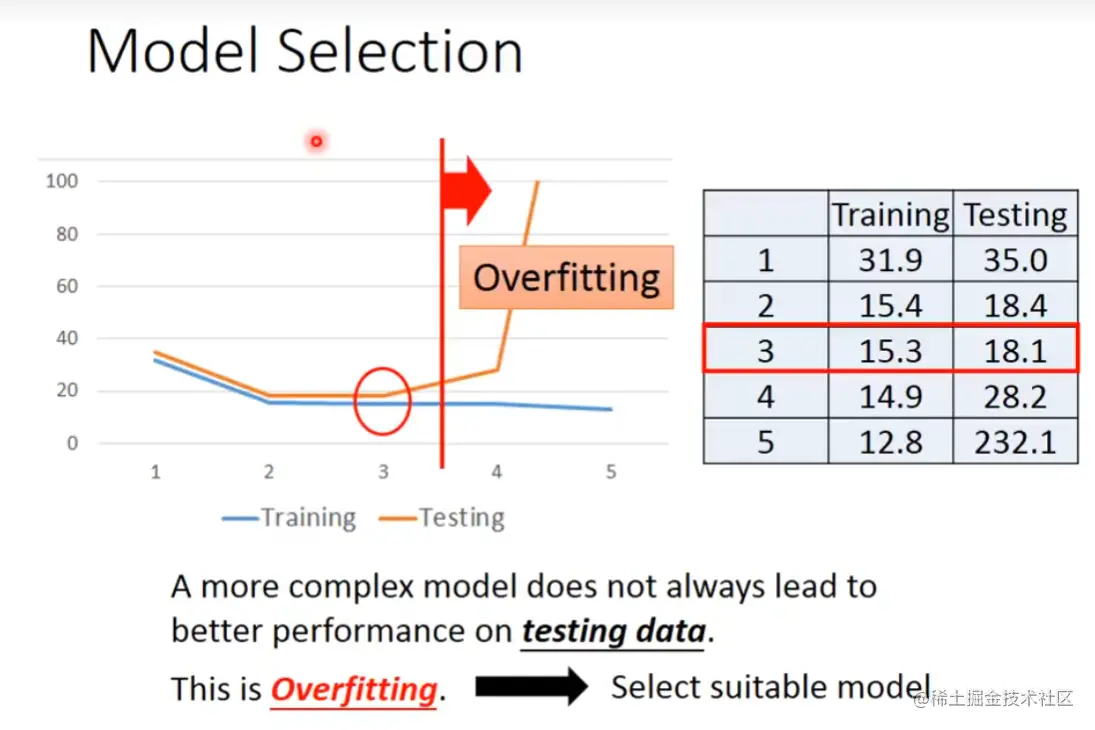
- larger λ -> larger training error, not necessarily smaller testing error
- How smooth? -> select λ obtaining the best model
- bias should not be considered in regularization (只提供位移,与smooth无关)
Step3: Gradiend Descent
Consider L(w)
- (Randomly) pick an initial value w0
- Compute dwdL∣w=w0, w1=w0−ηdwdL∣w=w0
- Repeat -> local optimal
Two parameters L(w,b)
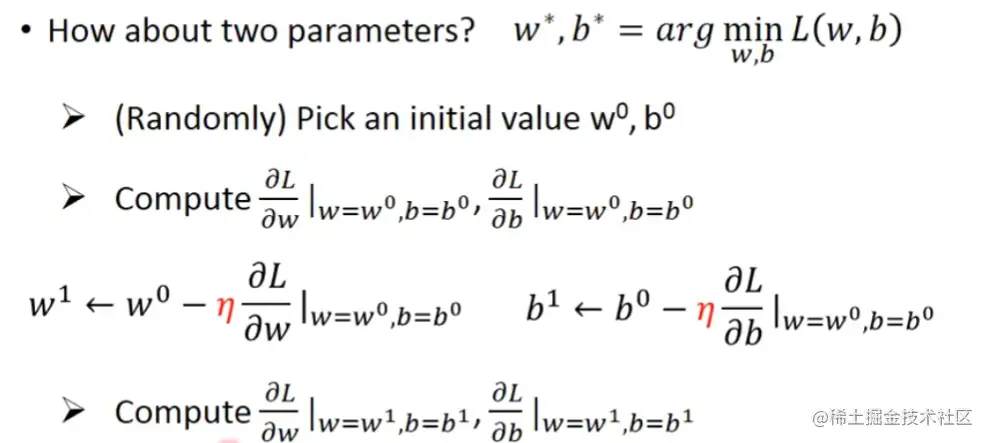
Gradient: ∇L=⎣⎡∂w∂L∂b∂L⎦⎤


