拉普拉斯变换是对傅立叶变换的推广,傅立叶变换要求est中的s是一个纯虚数,而拉普拉斯推广到了复数。
拉普拉斯变换
拉普拉斯变换如下:X(s)=∫−∞∞x(t)e−stdt
拉普拉斯和傅立叶的关系:X(σ+jω)=∫−∞∞x(t)e(σ+jω)tdt=∫−∞∞[x(t)eσt]ejωdt,拉普拉斯变换可以看作是对一个乘实指数信号后的傅立叶变换。
拉普拉斯变换需要同步给出s的收敛域(Region of convergence, ROC)。这是因为会存在表达式一样但收敛域不同的情况,考虑下面的例子。
分别计算x(t)=e−atu(t)和y(t)=−e−atu(−t),带入积分式可以发现,如果收敛那么X(s)=Y(s)=s+a1,但是收敛的域不一样,对于x(t),要求Re(s)<−a,对于y(t),要求Re(s)>a
remark: e−atu(t)的拉普拉斯变换形式为s+a1, ROC为Re(s)>−a,−e−atu(−t)的拉普拉斯变换形式为s+a1, ROC为Re(s)<−a
收敛域深入讨论
ROC具有以下特征
- 1 X(s)的ROC在s平面内是平行于虚轴的条带
这是因为收敛要求绝对可积,这个只对实部有约束
- 2 有理变换ROC内不包含极点。
所谓有理是指最后的变换完的形式是一个分式,分子和分母都是s的多项式。极点是分母多项式的0点。因为积分在极点处不收敛,所以ROC不会包含极点
- 3 x(t)有限持续期且绝对可积,那么ROC就是整个复平面
因为x(t)本身有限且绝对可积,那么不论你乘一个什么样的指数,其实都不会改变他的可积性,因此ROC不受拉普拉斯变换里那个s的影响。
- 4 x(t)为右边信号,并且如果某一个实部所对应的直线在ROC内,那么这个直线右侧全在ROC内。
所谓右边信号是指存在一个T,在小于T的位置信号都是0。在这种情况下,对于某个实部,如果拉普拉斯变换收敛了,那么更大的实部会让他衰减更快,更可以收敛。之所以要求是右边信号,就是因为衰减的快意味着左侧会更大,但因为左侧是有限的,所以不会影响可积性。
- 5 x(t)为左边信号,并且如果某一个实部所对应的直线在ROC内,那么这个直线左侧全在ROC内。
原理和上一条一样
- 6 x(t)为双边信号,并且如果某一个实部所对应的直线在ROC内,那么整个ROC应是包含该直线的条带。
结合上两条即可。把这个信号拆成一个左边信号和一个右边信号,那么ROC应该是两者的交集。而两者的ROC分别是向左和向右的半平面,因此求交集至多是一个条带。
3~6考虑了信号的所有情况,所以要么没有拉普拉斯变换,要么就是其中一种。
- 7 有理拉普拉斯的ROC的分界线总是落在极点上
结合2,4,5,可以知道,ROC内无极点,并且如果是左边信号,ROC是最左侧极点的左侧,右边信号,ROC是最右侧极点的右侧。
拉普拉斯逆变换
这个很好推,首先第一节已经发现,拉普拉斯变换X(σ+jω)可以看作是对信号x(t)e−σt的傅立叶变换,所以直接对X(σ+jω)做傅立叶逆变换,得到的是x(t)e−σt=2π1∫−∞∞X(σ+jω)ejωtdω,然后左边消去e−σt把s=σ+jω换元可得,
x(t)=2πj1∫σ−j∞σ+j∞X(s)estds
然而,对于有理变换,其实不需要直接求这个积分,因为可以直接把有理式拆分成一系列s+aC的形式,而这个由前面的remark可以直接恢复成±Ce−atu(±t)。然后根据ROC确定符号。
利用零极点图求X(s)
一个有理变换可以整理成M∏(s−aj)∏(s−βi),那么对于一个确定的s,可以在图上标出其位置,然后在实数轴标出aj的位置,此时从a指向s的向量就是s−aj,那么他的模就是长度(分母上是倒数),相位就是±arctan。如果是分子就是正号,分母就是负号。如果前面的系数M是复数,那么还要在增加一个π
性质
基本和傅立叶一样,只是增加了ROC的讨论
- 线性:ax(t)+by(t),L:aX(s)+bY(s),ROC求交集
- 时移:x(t−t0),L:e−st0X(s),ROC不变
- s域移动:e^{s_0t}x(t), L: X(s-s_0),ROC=R+Re(s_0)$
- 伸缩:x(at),L:∣a∣1X(as), ROC=R/a
- 时间反转:x(−t),L:X(−s), ROC=-R
- 共轭:x∗(t),L:X∗(s∗),ROC不变
- 卷积:x(t)∗y(t),L:X(s)Y(s), ROC求交,如果存在零极点相消,那么ROC可以更大
- 时域微分:dtdx(t),L:sX(s),ROC包括R
- s域微分:dX(s)/ds,InverseL:−tx(t),ROC=R
- 时域积分:∫−∞tx(t)dt,L:s1X(s), ROC包括R∩Re(s)>0
- 初值与终值定理:前提条件t<0时x(t)=0并且x(t)不包含冲激或高阶奇异导数,那么x(0+)=lims→∞sX(s),limt→∞x(t)=lims→0sX(s)
拉普拉斯与LTI
和傅立叶一样,如果单位冲激响应的拉普拉斯变换为H(s),那么对于y(t)=h(t)∗x(t),有Y(s)=H(s)X(s)。
- 因果系统的H的ROC是某个右半平面
这是因为因果系统的单位冲激响应只在t>0有,根据性质讨论可以得出此结论。如果是反过来结论不一定成立,但是如果H是有理的,那么因果性就等价于ROC位于最右侧极点的右边。
- 稳定系统等价于ROC包含虚数轴
因为稳定性要求h是绝对可积的,那么傅立叶变换收敛,这说明包含虚轴的ROC下H收敛。
- 推论:有理H的因果系统是稳定的,等价于所有极点都在左半平面
有理因果系统的ROC在最右侧极点的右边,所以如果所有极点都在左侧,他就包含虚轴
微分方程表征的系统
和傅立叶变换也基本一样
k=0∑Nakdtkdky(t)=k=0∑Nbkdtkdkx(t)
那么H(s)=∑k=0Naksk∑k=0Mbksk
单边拉普拉斯变换
和双边唯一的区别是,积分下限从−∞变成了0−。
性质也几乎一样,区别点时间尺度变换a必须是正数,否则没意义,因此没有反转。此外时域微分:dtdx(t),L:sX(s)−x(0−),别的一样。
线性反馈系统
一个通用的反馈系统的系统框图如下图所示
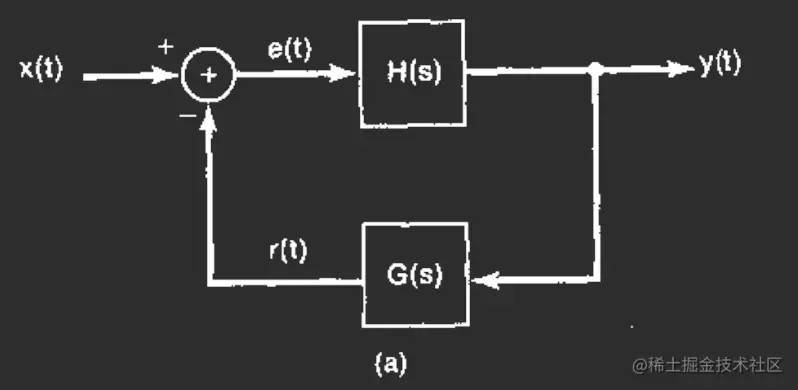 从框图可以得到整个系统的系统函数Q(s)=1+G(s)H(s)H(s)
从框图可以得到整个系统的系统函数Q(s)=1+G(s)H(s)H(s)
应用:构建逆系统
假设一个系统函数为P(s),那么构建G(s)=P(s),H(s)=K的线性反馈系统,K足够大的时候,整体的系统函数近似为P(s)1。
应用2: 构建稳定系统
回顾第九章,稳定系统要求h绝对可积(保证输入有界的时候输出有界),对应其拉普拉斯变换的sROC包含虚轴,因此,考虑一个不稳定的系统H(s)=s−ab,然后设计一个G(s)=K,反馈系统的拉普拉斯变换为Q(s)=s−a+Kbb,如果K>a//b,ROC就包含虚轴了。
离散随机信号
有的时候信号可能不是确定的,而是一个随机过程的sample,这样需要考虑输入和输出就有变化。
考虑输入x[n]是随机的,考虑信号在每个时刻的期望mx[n]=E[x[n]]。
广义平稳(WSS)的定义:一阶矩和二阶矩不随时间变化。
有了上述符号和平稳的概念,开始从定义出发分析。由定义:
y[n]=k=−∞∑∞h[k]x[n−k]
两侧求期望,并按照期望的线性性有
my[n]=E[y[n]]=k=−∞∑∞h[k]E[x[n−k]]
如果输入是平稳的,那么E[x[n]]=mx,所以
my[n]=k=−∞∑∞h[k]mx=mxH(ej0)
这样可以看到,其实如果输入平稳,输出也是平稳的。
自相关函数ϕyy[n,n+m]=E[y[n]y[n+m]],如果是平稳的,那么ϕy[n,n+m]只与间隔有关,可以简写为ϕyy[m]。
确定性自相关序列:chh[l]=∑k=−∞∞h[k]h[k+l],可以看作是h[n]∗h[−n],假设h是实的,所以Chh(ejω)=H(ejω)H∗(ejω)=∣H(ejω)∣2
如果用Φ表示ϕ的傅立叶变换,那么有Φyy(ejω)=Chh(ejω)Φxx(ejω)
E[y2[n]]=ϕyy[0]=2π1∫−ππΦyy(ejω)dω=2π1∫−ππ∣H(ejω)∣2Φxx(ejω)dω


