向量
向量既有长短又有方向,在 WebGL 中,向量可以代表一段位移,可以表示光照的角度等。
向量长度
向量长度公式如下所示:
v的长度=x2+y2
单位向量
单位向量是长度为 1 的向量,对于大部分向量,我们只关心向量的方向,而不在意向量的长度,这种情况下就适合用单位向量来表示。比如光线入射方向、反射方向等向量,单位向量通常也被称为标准向量。
向量的加(减)法
下图是两个向量相加的一个示意图,其意义为将向量 v1 的终点 (x1, y1),沿着向量 v2 的方向移动一段距离,这段距离的长度为 v2 向量的长度。
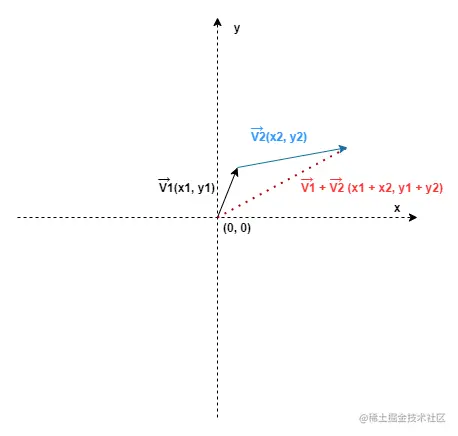
向量加法公式如下:
v1+v2=(x1+x2,y1+y2)
- 维度相同的两个向量才可以相加或者相减,得到的新向量维度和原向量相同,新向量各个分量等于原向量各个分量之和或之差。
- 向量不能和标量相加。
- 向量减法不满足交换律。
- 向量加法满足交换律。
向量伸缩
向量伸缩即向量乘上一个标量,公式如下所示:
v=(x,y)nv=(nx,xy)
向量旋转
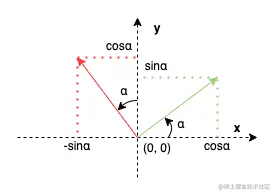
这里可能需要一点矩阵的知识,列出旋转矩阵如下:
[xy][cosαsinα−sinαcosα]=[xcosα−ysinαxsinα+ycosα]
向量旋转公式如下:
v旋转α度之后的坐标=(xcosα−ysinα,xsinα+ycosα)
向量点乘
向量点乘就是将两个向量的各个分量的乘积相加,返回一个标量。在光照模型中,漫反射光照强度因子就是光照入射角度与法向量的余弦值(单位化后)。
向量点乘公式如下:
a=(a1,a2)b=(b1,b2)a∙b=a1b1+a2b2
其数学上含义为向量 b 在 向量 a 上的投影的长度与向量 a 的长度相乘,两个向量之间的夹角为 α,所以下面这个公式也成立:
a∙b=∣a∣∣b∣cosα
向量叉乘
二维向量 a 和 b 的叉积为向量 a 与 向量 b 沿垂直方向的投影的乘积,其几何意义 就是向量 a、b 组成的平行四边形的面积,注:二维空间无法得到一个和原向量组成的坐标平面垂直的新向量,所以只能求出乘积的标量。
∣a×b∣=∣a∣∣b∣sinα
二维空间中向量叉乘的物理意义是 a 和 b 两个力的力矩,力矩可以理解为一个物体在力的作用下,绕着一个轴转动的趋向。它是一个向量,等于力臂 L 和力 F 的叉乘。
a×b=(x1,y1)×(x2,y2)=[x1x2y1y2]=x1y2−x2y1
事实上,向量叉乘的运算结果不是标量而是一个向量,一般用于3D坐标系中,且叉乘得到的新向量与两个原向量组成的坐标平面垂直。
a=(x1,y1,z1)b=(x2,y2,z2)a×b=(y1z2−y2z1,x2z1−x1z2,x1y2−x2y1)
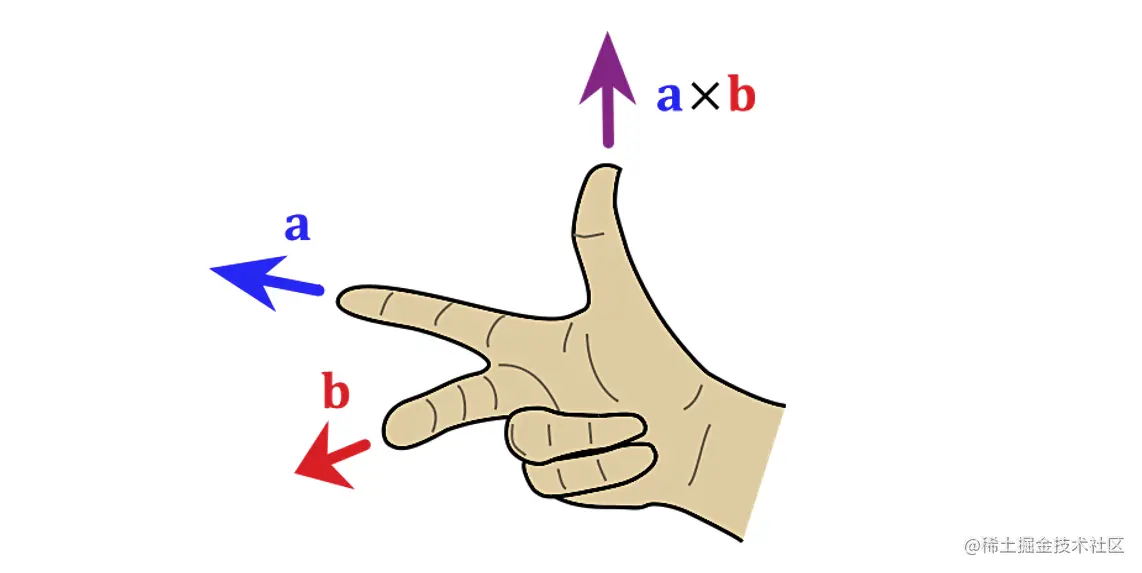
确定出 a、b 的叉积方向的方法:x 轴向右、y 轴向下的坐标系是右手系。在右手系中求向量 a、b 叉积的方向时,我们可以把右手食指的方向朝向 a,把右手中指的方向朝向 b,那么大拇指所指的方向就是 a、b 叉积的方向,这个方向是垂直纸面向外(即朝向我们)。因此,右手系中向量叉乘的方向就是右手拇指的方向,那左手系中向量叉乘的方向自然就是左手拇指的方向了。
矩阵
矩阵是按照行列排列的一系列数值得的集合,一个矩阵通常是由 m 行 n 列组成,我们称之为 m x n 矩阵,如果 m 和 n 相同,该矩阵代表一个方阵。
在 WebGL 中,前面讲的向量也可以用矩阵来表示,横着写1行4列为行向量,竖着写4行1列为列向量。
矩阵加减
两个矩阵相加或者相减需要满足一个条件,即两个矩阵必须同型,同型的意思是,行数和列数都必须一样。一个 m x n 矩阵 和一个 n x m 矩阵(m 不等于 n )是不能进行加减的。
[a1a3a2a4]+[b1b3b2b4]=[a1+b1a3+b3a2+b2a4+b4]
矩阵乘法
矩阵既可以和标量相乘,也能和矩阵相乘,也能和向量相乘。在讲解乘法运算之前,我们必须先明确相乘的顺序,因为矩阵相乘不满足交换律。
矩阵和标量相乘,返回一个新矩阵,新矩阵的各个元素等于原矩阵各个元素与标量的乘积。
[a1a3a2a4]×c=[ca1ca3ca2ca4]
矩阵与矩阵相乘也要满足一定条件:矩阵M×矩阵N,矩阵M的列数需要等于矩阵N的行数。
[a1a4a2a5a3a6]×⎣⎡b1b3b5b2b4b6⎦⎤=[a1b1+a2b3+a3b5a4b1+a5b3+a6b5a1b2+a2b4+a3b6a4b2+a5b4+a6b6]
转置矩阵
矩阵转置就是将原来矩阵的行向量转变为列向量,假设有一个矩阵M:
M=[a1a3a2a4]
其转置矩阵为:
MT=[a1a2a3a4]
逆矩阵
假设有一个 m 阶方阵A(A 矩阵必须是方阵才可能有逆矩阵),如果存在一个 n 阶方阵B,使得 A x B = B x A = I,其中 I 是单位矩阵,那么 B 是 A 的逆矩阵。A 矩阵是可逆矩阵,也称为非奇异矩阵,矩阵 A 的逆矩阵用 A 的 -1 次方表示。
A的逆矩阵=A−1
单位矩阵,以三阶为例:
I=⎣⎡100010001⎦⎤
逆矩阵在 WebGL 中的,有着非常重要的意义,将一个变换矩阵左乘一个列向量(此处列向量代表顶点坐标),代表了对原始顶点执行了某种变换,比如:旋转、缩放、平移等。逆矩阵的意义就是能够撤销这种变换,将变换后的坐标再还原回去。
实例:变换矩阵M,顶点坐标向量P,变换后的矩阵P1,先用M对P进行变换,然后再撤销这个变换,可以表达为下面的公式:
P1=M×PP=M−1×P1
推导过程:
P=P×I=P×M×M−1=P1×M−1
逆矩阵求解方法
正交矩阵
方阵M,当且仅当与其转置矩阵的乘积等于单位矩阵时,称其为正交矩阵。
根据前面逆矩阵的定义不难得出,其转置矩阵和逆矩阵是相等的,即:
正交矩阵的一个好处是,如果一个矩阵是正交矩阵,那么计算它的逆矩阵时,只需要对原矩阵转置即可,从而减少了计算量(逆矩阵的求解过程是很繁琐的),3D图形学中的最常见的旋转和镜像变换就都是用的正交矩阵实现的。
正交矩阵的判断条件:
- 矩阵的每一行都是单位向量
- 矩阵的某一行与其它行向量互相垂直,点积为0


