具体
文章:[Denoising Diffusion Probabilistic Models]([2006.11239] Denoising Diffusion Probabilistic Models (arxiv.org))
可借鉴的学习视频:视频
代码:暂时未实现
条件概率公式和高斯分布的KL散度
条件概率的一般形式
P(A,B,C)=P(C∣B,A)P(B,A)=P(C∣B,A)P(B∣A)P(A)P(B,C∣A)=P(B∣A)P(C∣A,B)
基于马尔科夫链关系A->B->C ,那么有
P(A,B,C)=P(C∣B,A)P(B,A)=P(C∣B)P(B∣A)P(A)P(B,C∣A)=P(B∣A)P(C∣B)
高斯分布的KL散度公式
对于两个单一变量的高斯分布p,q 而言,它们的KL散度
KL(p,q)=logσ1σ2+2σ22σ12+(μ1−μ2)2−21
对于两个正态分布X−N(μ1,σ1)和Y−N(μ2,σ2)的叠加后的分布aX+bY的均值为aμ1+bμ2,方差为a2σ12+b2+σ22。
因而对于
αt−αtαt−1zt−2+1−αtzt−1
可以转换成
1−αtαt−1z,wherezmergetwoGaussians
参数重整化
若希望从高斯分布N(μ,σ2) 中采样,可以先从标准分布N(0,1) 中采样出z ,再得到σ∗z+μ 。这也做的好处是将随机性转移到了z 这个常量上,而σ,μ 则当作仿射变换网络的一部分。(为了可以梯度传播)
马克尔夫链
马尔可夫链(Markov Chain),描述了一种状态序列,其每个状态值取决于前面有限个状态。
马尔可夫链是满足下面两个假设的一种随机过程:
1、t+1时刻系统状态的概率分布只与t时刻的状态有关,与t时刻以前的状态无关;
2、从t时刻到t+1时刻的状态转移与t的值无关。一个马尔可夫链模型可表示为=(S,P,Q),其中各元的含义如下:
1)S是系统所有可能的状态所组成的非空的状态集,有时也称之为系统的状态空间,它可以是有限的、可列的集合或任意非空集。本文中假定S是可数集(即有限或可列)。用小写字母i,j(或Si,Sj)等来表示状态。
2)P是系统的状态转移概率矩阵,其中Pij表示系统在时刻t处于状态i,在下一时刻t+l处于状态j的概率,N是系统所有可能的状态的个数。对于任意i∈s,有。
3)Q是系统的初始概率分布,qi是系统在初始时刻处于状态i的概率,满足。
Diffusion model
原理图示:
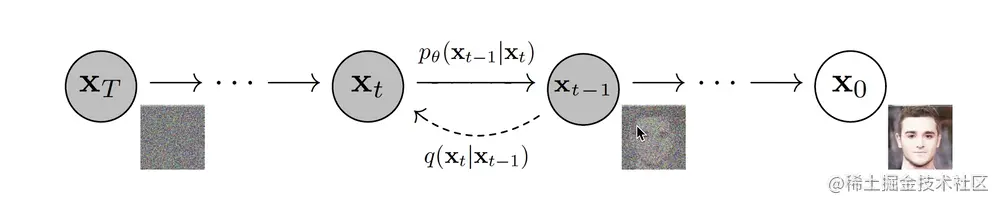
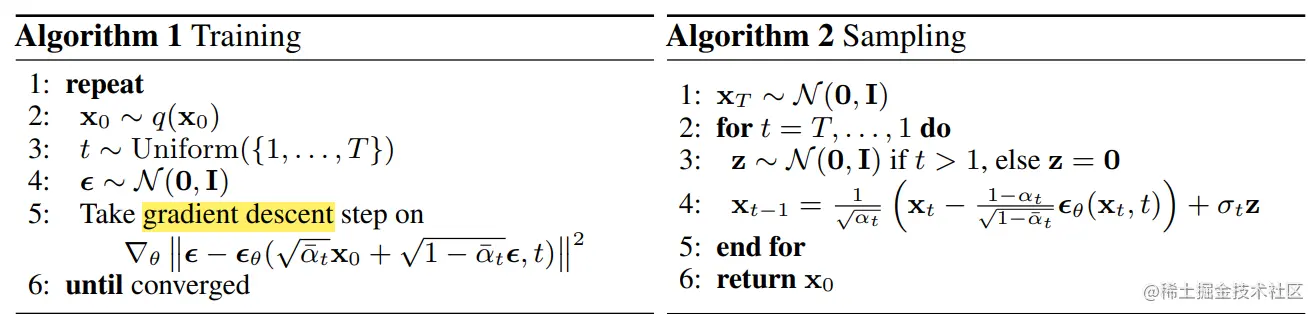
扩散步骤:
扩散过程本质上是逐渐对初始数据加入高斯噪声的步骤
q(xt∣xt−1)=N(xt;1−βtxt−1,βtI)q(x1:T∣x0)=t=1∏Tq(xt∣xt−1)EventuallywhenT−>∞xTisequivalenttoaniostropicGaussiandistribution
它允许以封闭形式在任意时间步长t采样x_t,同时我们使用αt=1−βt,αtˉ=Πs=1tαs
整体的实验过程当作我们对于βt的变化是限制成线性增量的,即为βy∈(10−4,0.02)之间
那儿我们就可以有下列的式子
q(xt∣x0)=N(xt;αtˉx0,(1−αtˉ)I)


逆扩散步骤:
逆过程是从高斯噪声中恢复原始数据,我们可以假设它也是一个高斯分布,但是无法逐步地拟合分布,所以需要构建一个参数分布来去做估计。逆扩散过程仍然是一个马克尔夫链过程。
pθ(x0:T)=p(xT)t=1∏Tpθ(xt−1∣xt)=N(xt−1;μθ(xt,t),∑θ(xt,t))
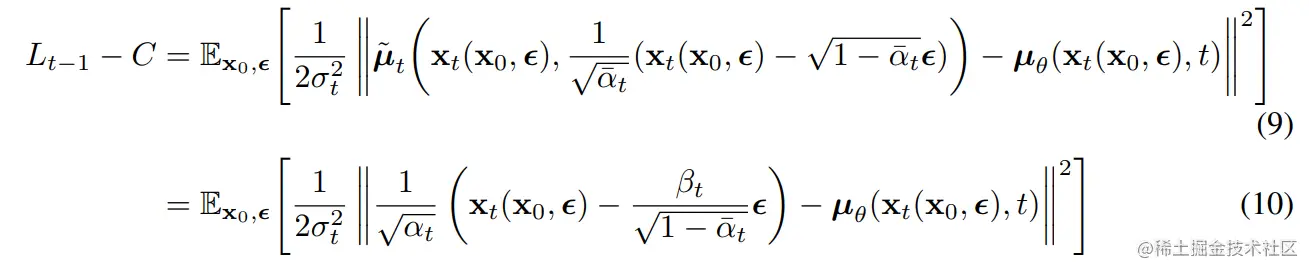
后验的扩散条件概率q(xt−1∣xt,x0)分布是可以用公式表达的
这也就是说,给定xt,x0,我们是可以计算出xt−1
注意:高斯分布的概率密度函数f(x)=2πσ1exp2σ2−(x−μ)2

对于该式子,我们进行数据的替换,同时结合正向扩散的过程可以得到下列的式子
xt(x0,ϵ)=αtˉx0+1−αtˉϵforϵ∼N(0,I)
整体的思路