

本文已参与「新人创作礼」活动
大纲
1.流网络&最大流 2.Edmonds-Karp算法求解 3.Dinic算法求解 4.最大流求二分图匹配
1.流网络&最大流
流网络简介
流网络G(V, E)是一个有向图,图中每条边(u, v)∈E都有一个非负权值c(u, v) ,称为边的容量。并 且,如果边集E包含一条边(u, v),则图中不存在反方向的边(v, u)。如果(u, v)∉ E,则c(u, v) = 0。 在流网络的所有节点中,有两个特殊节点:源点S和汇点T。
流网络示例:
设G(V, E)是一个流网络,其容量函数为c,设S为网络的源点,T为网络的汇点。G中的流是一个实数函数f(u, v) (u∈V && v属于V)且满足以下性质:
① 容量限制:对于任意节点u, v∈V,要求:0 ≤ f(u, v) ≤ c(u, v)。 ② 流量守恒:对于任意节点u∈V - {S, T},要求:所有x∈Vf(x, u) = 所有y∈Vf(y, u) ③ 斜对称:f(u, v) = - f(v, u)
实例
例如下图的网络流量为5(流量/容量)。
对于一个给定的网络,合法的流函数f有很多,其中使得整个网络的流量最大的流函数被称为网络的最大流,此时的流量被称为网络的最大流量。
例如:下图的流网络的最大流量为6(流量/容量)。
概念:
残留网络(残量网络):任意时刻,网络中所有节点以及剩余容量大于0的边构成的子图称为残留网络。
初始化:基于原始网络建立残存网络,初始化时残留网络和原网络一致。
暴力求解最大流
第1步:从残存网络中找出一条从起点S到终点T的简单路径。 第2步:基于路径中容量最小的边,更新残留网络。
第3步:从残留网络中删除已经饱和的边。
重复上述3步操作,直到图中不存在S->T的路径。
流量 = 容量 - 空闲量
算法问题:上面描述的简单算法不能确保一定可以找到最大流。
简单算法计算出的流为阻塞流,最大流也是阻塞流的一种。
2.Edmonds-Karp算法求解
(1).Ford-Fulkerson算法
简单算法不会反悔,一旦被选中就不会再改变,Ford-Fulkerson是在简单算法上的一种改进算法,可以确保找到最大流。
初始化:基于原始网络建立残留网络,初始化时残留网络和原网络一致。 第1步:从残存网络中找出一条从起点S到终点T的简单路径。 第2步:基于路径中容量最小的边,更新残留网络。 第3步:从残留网络中删除已饱和的边。 第4步:添加一条反向路径,路径中边的容量 = 原路径的流量。
重复上述4步操作,直到图中不存在S->T的路径
反向路径使得流量可以反悔回流。
合并方向相同的边,不存在S->T的路径后删除反向路径。
流量 = 容量 - 空闲量
流量 = 容量 - 空闲量,最大流量 = 2 + 4 = 6。
算法缺陷:Ford-Fulkerson算法在极端情况下时间复杂度非常糟糕。
Ford-Fulkerson最坏情况下的重复次数等于最大流的大小。
设图中边的数量为M,单次查找路径的时间复杂度为O(M)
设流网络的最大流为F,则Ford-Fulkerson时间复杂度为O(F * M)。
2.Edmonds-Karp算法
2.1Edmonds-Karp算法流程
Edmonds-Karp算法是Ford-Fulkerson算法的性能优化算法,时间复杂度不依赖最大流的大小。
Edmonds-Karp算法每次找的路径都是S->T的最短路径,寻找最短路时将图当做无权图。 Ford-Fulkerson算法允许用任何的方式寻找S->T的路径,所以可以将Edmonds-Karp算法 看成Ford-Fulkerson算法的一种实现方式。 Edmonds-Karp算法的时间复杂度为𝐀(𝐀2 ∗ 𝐀),其中N和M分别为图中顶点数和边数。 ① 原网络中有M条边,残留网络中最多有2M条边,找最短路径的时间复杂度为O(M)。 ② Edmonds和Karp证明了最坏情况下算法循会环M*N次。
- 构建残留网络,初始化的残留网络就是原网络的一个拷贝。
- 重复以下操作,直到残留网络中不存在增广路:(一条从S到T的路径,边上剩余流量都>0) ① 在残留网络中找最短增广路。 ② 计算增广路中各边上的剩余流量的最小值minf。 ③ 更新残留网络,将增广路中的每条边的剩余容量 - minf。 ④ 增加反向路径,将增广路的反向路径中各边的剩余容量 + minf。
Edmonds-Karp算法流程代码实现
核心部分:
3.Dinic算法求解
(0).Dinic算法历史
话说Dinic算法应该叫做Dinitz算法,接下来我把这一段有趣的历史简单的说一下。
Dinic算法由Yefim Dinitz发表于1970年,早于Edmonds-Karp发表的1972年。由于Dinic算法 发表于苏联,Edmonds和Karp在发表Edmonds-Karp算法时,并不知道Dinic算法的存在。 Even和Tarjan发表于1975年的论文,首次将Dinitz的算法介绍给西方。 Even和Tarjan错误的将Dinitz的名字写成了Dinic,从此该算法就被称为Dinic算法了。 Dinic算法时间复杂度是O(M * N^2),优于Edmonds-Karp算法的O(N * M^2)。
(1).进入正题,Dinic算法
通俗的说,有了这些流量就不能再有其他流量,也就是说这些流量阻塞了管道。
分层图:对图进行BFS,设d[x]表示顶点x到起点s的最小距离,在残留网络中满足d[v] = d[u] +1的边(u, v)构成的子图称为分层图。
- 构建残留网络(剩余流量),初始化的残留网络就是原网络的一个拷贝。
- 重复以下操作,直到残留网络中不存在增广路: ① 构建残留网络的分层图(BFS)。 ② 在分层图中寻找阻塞流(普通算法dfs) ③ 使用阻塞流更新残留网络(残留网络中的剩余流量 - 阻塞流中的流量),增加反向路径。
Dinic算法实践示例:
10步详细过程。
1.建立残留网络的分层图
2.在分层图中找阻塞流
3.使用阻塞流更新残留网络
4.建立残留网络的分层图
5.在分层图中找阻塞流
6.使用阻塞流更新残留网络
7.建立残留网络的分层图
8.在分层图中找阻塞流
9.使用阻塞流更新残留网络
10.不存在增广路了,将反向边去掉,最大流 = 容量 - 空闲量 = 算法过程中阻塞流之和。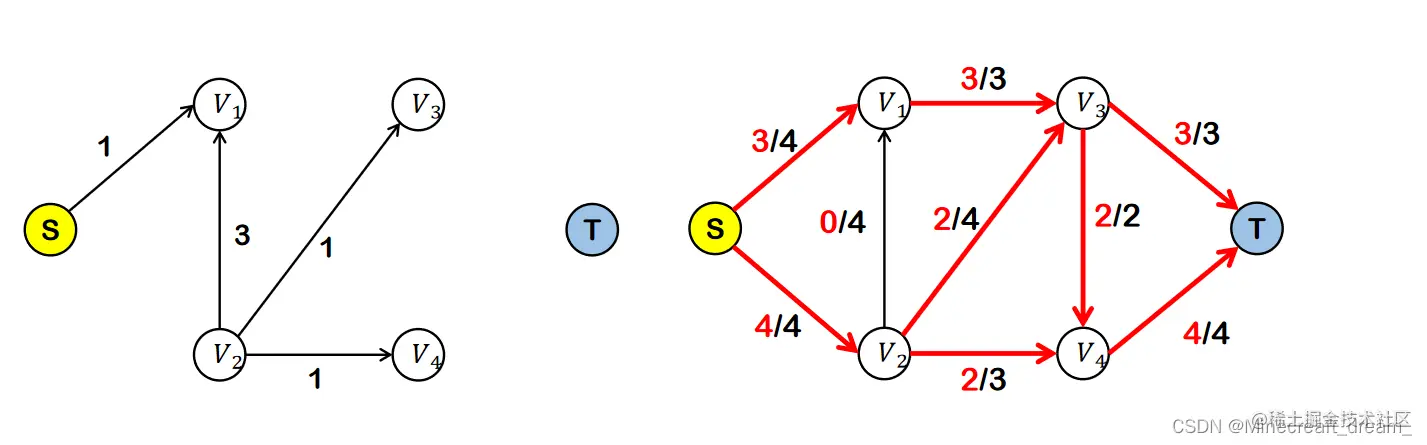
Dinic算法代码实现:
核心部分:
4.最大流求解二分图匹配
可以将二分图最大匹配转换为最大流问题,Dinic算法求解二分图最大匹配时间复杂度:O(M sqrt (N))
① 建立超级源点S和超级终点T,建立S到每个左部节点的有向边,权值为1,建立每个右部节 点到T的有向边,权值为1。 ② 原图中的无向边改为从左部到右部的有向边,权值为1,最大匹配问题转换为S->T的最大流。 ③ 最大流经过的原图中的点和边,就是最大匹配的匹配点和匹配边。
概念:
完备匹配:给定一个二分图,其左部右部节点数相同,都为N。如果该二分图的最大匹配包含N 条匹配边,则称该二分图具有完备匹配。 多重匹配:给定一张包含N个左部节点、M个右部节点,从中选出尽量多的边,使第i个左部节点 至多与L[i]条选出的边相连,第i个右部节点至多与R[i]条选出的边相连。该问题称为二分图的多 重匹配。
多重匹配问题可以转换为最大流问题进行求解:
① 建立超级源点S和超级终点T,建立S到每个左部节点的有向边,权值为L[i],建立每个右部 节点到T的有向边,权值为R[i]。 ② 原图中的无向边改为从左部到右部的有向边,权值为1,最大匹配问题转换为S->T的最大流。
