模型起源
2015年的时候,有几位大佬基于非平衡热力学提出了一个纯数学的生成模型 (Sohl-Dickstein et al., 2015)。不过那个时候他们没有用代码实现,所以这篇工作并没有火起来。
直到后来斯坦福大学(Song et al., 2019) 和谷歌大脑 (Ho et al., 2020) 有两篇工作延续了15年的工作。再到后来2020年谷歌大脑的几位大佬又把这个模型实现了出来(Ho et al., 2020),因为这个模型一些极其优秀的特性,所以它现在火了起来。
扩散模型可以做什么?呢它可以做一些。条件生成和非条件生成。在图像、语音、文本三个方向都已经有了一些应用,并且效果比较突出。
比较出圈的工作有我刚介绍的text to image的生成工作比如
什么是扩散模型?
Diffusion model 和 Normalizing Flows, GANs or VAEs 一样,都是将噪声从一些简单的分布转换为一个数据样本,也是神经网络学习从纯噪声开始逐渐去噪数据的过程。
包含两个步骤:
- 一个我们选择的固定的(或者说预定义好的)前向扩散过程 q ,就是逐渐给图片添加高斯噪声,直到最后获得纯噪声。
- 一个需要学习的反向的去噪过程 pθ,训练一个神经网做图像去噪,从纯噪声开始,直到获得最终图像。
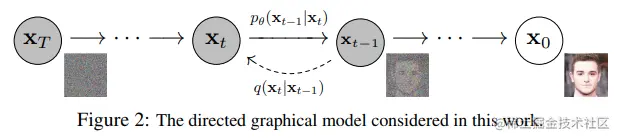
前向和反向过程都要经过时间步t,总步长是T(DDPM中T=1000)。
你从t=0开始,从数据集分布中采样一个真实图片x0。比如你用cifar-10,用cifar-100,用ImageNet,总之就是从你数据集里随机采样一张图片作为x0。
前向过程就是在每一个时间步t中都从一个高斯分布中采样一个噪声,将其添加到上一时间步的图像上。给出一个足够大的T,和每一时间步中添加噪声的表格,最终在T时间步你会获得一个isotropic Gaussian distribution。
我要开始上公式了!
我们令q(x0)是真实分布,也就是真实的图像的分布。
我们可以从中采样一个图片,也就是x0∼q(x0) 。
我们设定前向扩散过程q(xt∣xt−1)是给每个时间步t添加高斯噪声,这个高斯噪声不是随机选择的,是根据我们预选设定好的方差表(0<β1<β2<...<βT<1)的高斯分布中获取的。
然后我们就可以得到前向过程的公式为:
q(xt∣xt−1)=N(xt;1−βtxt−1,βtI).
回想一下哦。一个高斯分布(也叫正态分布)是由两个参数决定的,均值μ和方差σ2≥0。
然后我们就可以认为每个时间步t的图像是从一均值为μt=1−βtxt−1、方差为σt2=βt的条件高斯分布中画出来的。借助参数重整化(reparameterization trick)可以写成
xt=1−βtxt−1+βtϵ
其中ϵ∼N(0,I),是从标准高斯分布中采样的噪声。
βt在不同的时间步t中不是固定的,因此我们给β加了下标。对于βt的选择我们可以设置为线性的、二次的、余弦的等(有点像学习率计划)。
比如在DDPM中β1=10−4, βT=0.02,在中间是做了一个线性插值。而在Improved DDPM中是使用余弦函数。
从x0开始,我们通过x1,...,xt,...,xT,最终获得xT ,如果我们的高斯噪声表设置的合理,那最后我们获得的应该是一个纯高斯噪声。
现在,如果我们能知道条件分布p(xt−1∣xt),那我们就可以将这个过程倒过来:采样一个随机高斯噪声xt,我们可以对其逐步去噪,最终得到一个真实分布的图片x0。
但是我们实际上没办法知道p(xt−1∣xt)。因为它需要知道所有可能图像的分布来计算这个条件概率。因此,我们需要借助神经网络来近似(学习)这个条件概率分布。 也就是pθ(xt−1∣xt),其中, θ是神经网络的参数,需要使用梯度下降更新。
所以现在我们需要一个神经网络来表示逆向过程的(条件)概率分布。如果我们假设这个反向过程也是高斯分布,那么回想一下,任何高斯分布都是由两个参数定义的:
- 一个均值μθ;
- 一个方差Σθ。
所以我们可以把这个过程参数化为
pθ(xt−1∣xt)=N(xt−1;μθ(xt,t),Σθ(xt,t))
其中均值和方差也取决于噪声水平t。
从上边我们可以知道,逆向过程我们需要一个神经网络来学习(表示)高斯分布的均值和方差。
DDPM中作者固定方差,只让神经网络学习条件概率分布的均值。
First, we set Σθ(xt,t)=σt2I to untrained time dependent constants. Experimentally, both σt2=βt and σt2=β~t (see paper) had similar results.
Improved diffusion models这篇文章中进行了改进,神经网络既需要学习均值也要学习方差。
通过重新参数化均值 定义目标函数
为了推导出一个目标函数来学习逆向过程的均值,作者观察到q和pθ可以看做是一个VAE模型 (Kingma et al., 2013).
因此,变分下界(ELBO)可以用来最小化关于ground truth x0的负对数似然。
这个过程的ELBO是每个时间步t的损失总,L=L0+L1+…+LT。
通过构建正向𝑞过程和反向过程,损失的每一项(除了L0)是两个高斯分布之间的KL散度,可以明确地写为关于平均值的L2损失!
因为高斯分布的特性,我们不需要在正向q过程中迭代t步就可以获得xt的结果:
q(xt∣x0)=N(xt;αˉtx0,(1−αˉt)I)
其中αt:=1−βt and αˉt:=Πs=1tαs。
这是一个很优秀的属性。这意味着我们可以对高斯噪声进行采样并适当缩放直接将其添加到x0中就可以得到xt。请注意,αˉt是方差表βt的函数,因此也是已知的,我们可以对其预先计算。这样可以让我们在训练期间优化损失函数L的随机项(换句话说,在训练期间随机采样t就可以优化Lt)。
这个属性的另一个优美之处是通过重新参数化平均值,使神经网络学习(预测)添加的噪声。
通过神经网络ϵθ(xt,t)预测噪声,可以构成损失函数中时间步t的KL项。
这意味着我们的神经网络变成了噪声预测器,而不是直接去预测均值了。
均值的计算方法如下:
μθ(xt,t)=αt1(xt−1−αˉtβtϵθ(xt,t))
最后的目标函数Lt 长这样,给定随机的时间步 t 使ϵ∼N(0,I) ):
∥ϵ−ϵθ(xt,t)∥2=∥ϵ−ϵθ(αˉtx0+(1−αˉt)ϵ,t)∥2.
x0是初始图像,我们看到噪声t样本由固定的前向过程给出。ϵ是在时间步长t采样的纯噪声,ϵθ(xt,t)是我们的神经网络。神经网络的优化使用一个简单的均方误差(MSE)计算真实噪声和预测高斯噪声之间的差异。
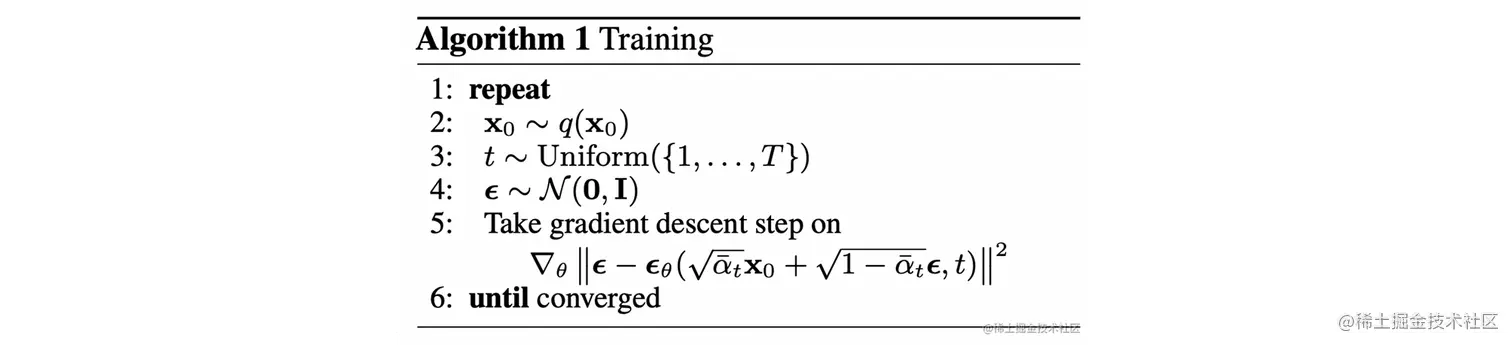
训练算法如下:
-
从未知的真实数据分布q(x0)中随机采样x0,
-
我们在1和T之间均匀采不同时间步的噪声,
-
我们从高斯分布采样一些噪声,并在t时间步上使用前边定义的优良属性来破坏输入分布,
-
神经网络根据损坏的图像xt进行训练,目的是预测施加在图片上的噪声,也就是基于已知方差表βt作用在x0上的噪声
所有这些都是在批量数据上完成的,使用随机梯度下降优化神经网络。


