本文已参与[新人创作礼]活动,一起开启掘金创作之路
图形学的数学基础(十二):mvp变换
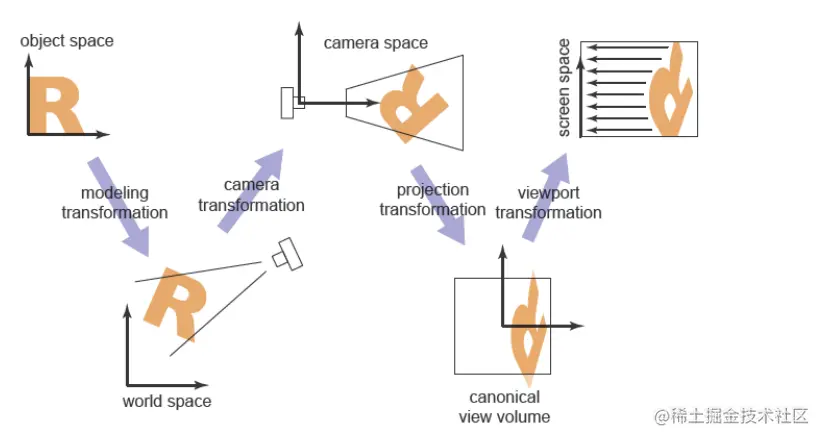
图形系统的一个重要任务是将三维空间中的模型映射到二维平面上(以像素为单位),这是一个复杂的过程,取决于许多因素,包括但不限于相机的位置,方向,投影的类型(正交/透视),fov,和viewport宽高,对于所有复杂的矩阵变换,最好的做法是将其分解为几个更简单的矩阵乘积。大多数图形系统通过使用四个转换序列来实现m,以openGL为例:

-
modelMatrix:将视图从模型空间转换为世界空间。直白的说就是将模型摆放到世界坐标空间的何处。这一步确立了世界空间中各模型的相对布局,摆放位置。
-
viewMatrix:将视图从世界空间转换到相机空间。简单来讲就是:我们从何处,在什么角度,朝什么方向观察我们的世界。
-
Projection:将视图从相机空间映射到[−1,1]3,的单位立方体中,为了下一步viewport变换做准备
-
viewport: 将视图从单位立方体映射到所需的屏幕空间(screenSpace),取决于输出图像的大小和位置。
view Transform
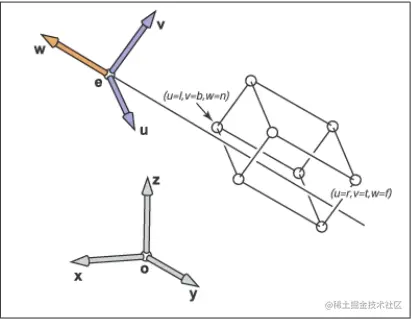
现实生活中,如果相机和所有物体一起移动(相对位置关系不变),则拍出来的照片也都是一样的。根据这个原理我们得出:将相机移动到原点,朝向-z方向,构造出一个变换矩阵Mview,其他物体随着相机一起移动(应用Mview)。即可完成viewTransform。如何构造Mview?将视图从世界空间转换到相机空间?首先需要定义相机参数:
- 位置(eye Position):e
- 观测方向(gaze Direction):g
- 向上方向(up Direction):t
根据这些信息,我们可以构造一个以e为原点的uvw标准正交基。
- 矢量正交化
- 将e移动到原点
- 旋转g 到-z方向
- 旋转t到y方向
- 旋转g×t到x方向。
因此我们可以将Mview拆解成平移和旋转两个部分.首先需要对相机参数的矢量进行正交化。
Mview=RviewTview
正交化
根据前边章节讲过的矢量叉乘正交化的方法,可以计算出:
w^=−∣∣g∣∣g
u^=∣∣t×w∣∣t×w
v^=w×u
平移矩阵
Tview = ⎣⎡100001000010−xe−ye−ze1⎦⎤
旋转矩阵
旋转矩阵不好写,但是我们可以反过来思考这个问题,将x(1,0,0),y(0,1,0),z(0,0,1)分别旋转到u^,v^, −w^是很好写的,由于这两个矩阵互为逆矩阵,根据旋转矩阵的性质,旋转矩阵都是正交的,而正交矩阵的逆矩阵等于其转置。所以我们可以先求Rview的逆矩阵,然后将其转置,即可得到Rview:
Rview−1 = ⎣⎡xuyuzu0xvyvzv0xwywzw00001⎦⎤
Rview = ⎣⎡xuxvxw0yuyvyw0zuzvzw00001⎦⎤
合到一起
Mview=RviewTview=⎣⎡xuxvxw0yuyvyw0zuzvzw00001⎦⎤⎣⎡100001000010−xe−ye−ze1⎦⎤
至此我们完成了Mview的推导过程,实现了视图从世界空间到相机空间的转换。
参考
《3D数学基础》图形和游戏开发(第二版)
GAMES101 -现代计算机图形学入门-闫令琪
fundamentals-of-computer-graphics


