

我正在和我的朋友Balaji一起研究DIY Pick and Place Robot课程。我负责软件方面的工作,而硬件则由Balaji负责。
描述
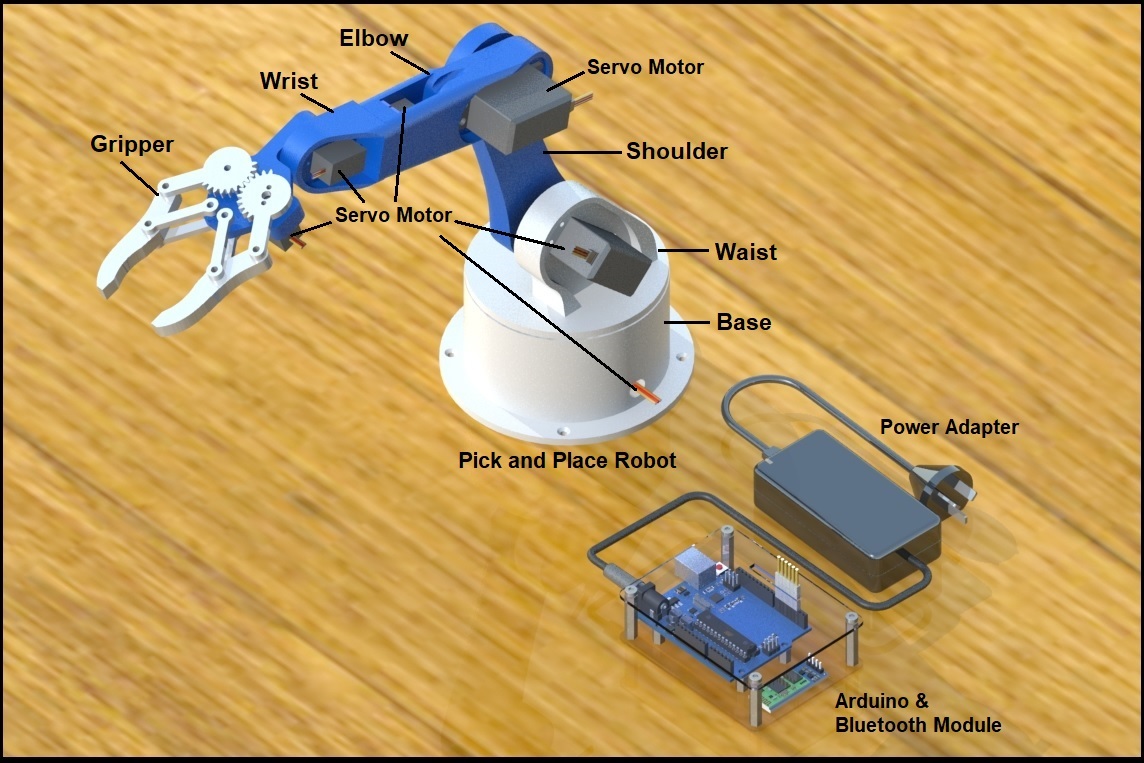
拾取和放置机器人系统使拾取零件并将其放置在所需位置的过程自动化。这些机器人在工业自动化中发挥着重要作用。该系统由链接、关节和抓手组成,相当于人的手。机器人的每个关节和抓手都包含一个单独的电机,用于自动拾取和放置操作。
前提是
- 具有Go语言的基本编程知识
- 不需要电子学知识。本课程是自给自足的,你将需要电子知识来建立取放机器人。
- 本课程也能满足您开发iOS和Android应用程序所需的Swift和App Inventor知识。
技术栈
- Arduino
- 机器人技术
- 进展
- 雨燕
- 蓝牙通信
- 应用发明家
该套件包括哪些内容?
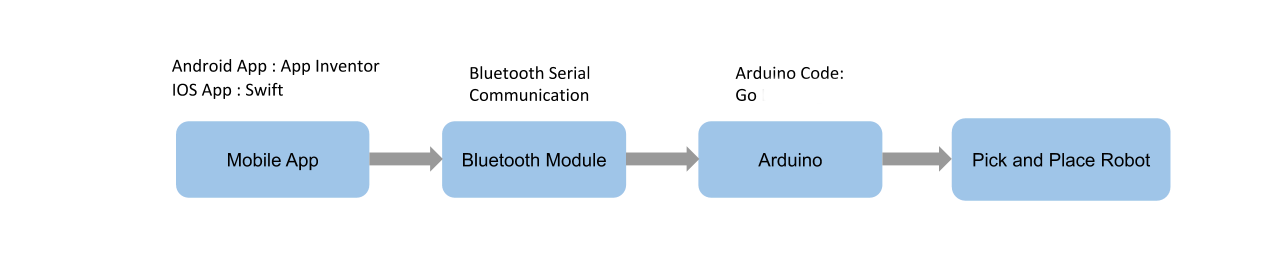
Pick and place机器人手臂套件是一个为业余爱好者提供的自己动手的套件,旨在提供开发具有6个自由度(6个电机)的成熟机器人手臂的经验。该套件捆绑了所有必要的机械部件、电子部件和建造机器人的组装说明。它还包括一个详细的教程,用于开发机器人手臂和Arduino之间使用Go的连接。我们还将开发一个Android和iOS应用程序,与Arduino对话,并使用蓝牙从移动设备控制机械臂。
| 序号 | 组装 | 部件名称 | 技术规格 | 数量 |
|---|---|---|---|---|
| 1 | 机械 | 底座 | 塑料 - 3D打印的 | 1 |
| 2 | 腰部 | 塑料 - 3D打印 | 1 | |
| 3 | 肩部 | 塑料 - 3D打印 | 1 | |
| 4 | 肘部 | 塑料 - 3D打印 | 1 | |
| 5 | 腕部 | 塑料 - 3D打印 | 1 | |
| 6 | 手柄 | 塑料 - 3D打印 | 1 | |
| 7 | 马达 | 伺服电机1 | 3线伺服电机 | |
| 工作电压:4.8V - 6.6V | ||||
| 失速扭矩:9.4公斤-厘米(4.8V);11公斤-厘米(6.0V) |
| 1 |
| 8 | 伺服电机2 | 3线伺服电机
工作电压:4.8V - 6.6V
失速扭矩:1.8公斤-厘米(4.8V);2.2公斤-厘米(6.6V)
| 1 | | 9 | 电源供应 | 电源适配器 | 额定功率。5V, 4A | 1 | | 10 | 额定功率。5V, 4A | 1 | | 11 | 配件 | 跳线 | 类型。公对母,长度:20 CM | 1套 | | 12 | 螺钉 | 金属螺钉 | 1套 |
你将学到什么?
- 机器人手臂的基础知识,伺服电机,Arduino,蓝牙模块和串行通信。
- 机器人手臂、Arduino和蓝牙模块的连接
- 实现机器人手臂的控制模式。手动模式和教导与重复模式
- 使用gobot.io/,在Go中开发固件
- 通过App inventor开发安卓应用
- 使用Swift开发iOS应用程序
