

在测绘中使用摄影来测量物体之间的距离,这一概念被称为摄影测量学。这是通过从不同角度和距离拍摄的一连串照片来看同一物体而实现的。通过对某个物体的这些距离进行三角测量,就有可能创造出该物体、土地或空间的三维表示,然后我们就可以利用三维模型来完成大量不同的任务,如进行测量。这一过程在众多不同的使用案例中得到了很大的利用,如土地测量、医学或体育。例如,一块土地的航空摄影测量可以极大地提高工程师、建筑师和建筑团队对该地块的工作做出明智决定的能力。
可以说,最受欢迎的摄影测量软件是Pix4D,它为使用无人机拍摄的照片进行航空摄影测量进行了优化,用于土地测量、建筑和农业规划等各种用途。Pix4D公司用于这一任务的主要产品是Pix4Dmapper和Pix4Dmatic。Pix4Dmapper是专业无人机测绘的主要软件,而Pix4Dmatic是为了在更大规模的项目中做同样的工作。在这篇博文中,我们将对Pix4Dmapper进行初步了解,对Pix4Dmatic进行深入了解。然后我们将学习如何在Paperspace Core上设置Pix4Dmatic来处理一个样本数据集。
让我们看看我们如何使用强大的GPU来处理摄影测量任务所需的必然的大数据。
为什么使用摄影测量?
Pix4D可以说是辅助土地测量和无人机规模测绘的首屈一指的服务,但这项技术的实际、功能性用例是什么?
Pix4Dmapper是Pix4D的小规模无人机测绘软件。通过Pix4Dmapper,可以用任何相机或无人机捕捉RGB、热敏或多光谱图像,在应用程序中把地面或空中图像数字化为可用的、三维和数字表示,然后使用这些表示来创建精确的测量和检查感兴趣的数据。然后,这些测量结果可以用来帮助完成许多任务,如指导施工、土地测量等等。然而,Pix4Dmapper在快速处理数据的数量上是有限的。
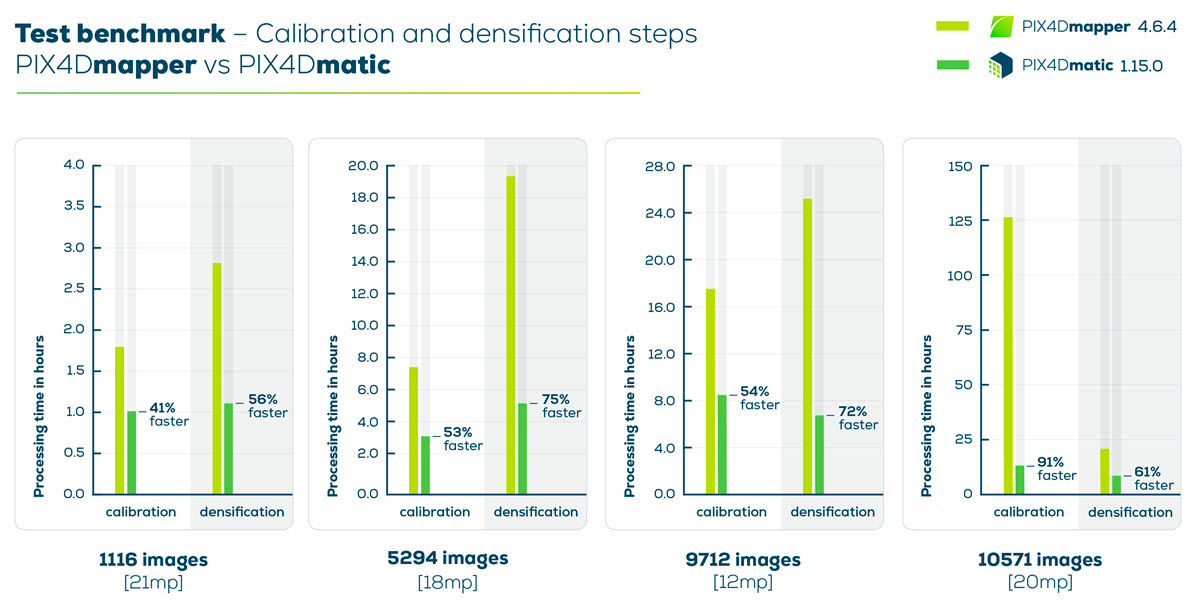
Pix4Dmatic是Pix4D的解决方案,用于处理大数据。它允许对陆地、走廊和大范围的测绘进行下一代摄影测量。Pix4Dmatic在其他功能上与Pix4Dmapper非常相似,但在摄影测量的处理步骤上有明显的速度提升。因为我们可以获得一个大的例子数据集和一个Core GPU,我们将在本教程中使用Pix4Dmatic。
设置。核心
在开始之前,在Paperspace上加载一个Windows Core机器。我建议你选择安培机类型之一(A4000、A5000、A6000和A100),如果它们可用的话,因为Pix4D的运行计算成本很高。建议至少有32GB(2'000-5'000张20MP的图像)至64GB(5'000-10'000张20MP的图像)的CPU内存,以及至少100GB-200GB的可用内存空间(2'000-5'000张20MP的图像)。你可以在核心机器创建页面的 "机器类型 "部分改变可用的存储量。
一旦你完成这些步骤,点击底部的 "创建 "来创建核心机。然后,点击GUI中的 "启动 "按钮,访问你的Windows桌面。
设置好了。Pix4D
现在,我们进入了我们的核心机。我们需要做的第一件事是在Pix4D创建一个账户并下载软件。Pix4D是一个商业产品,所以你将需要注册一个付费账户来使用该软件套件。然而,如果你选择的话,你可以获得15天的免费试用期来演示他们的产品。
要开始建立你的账户,请进入这个页面,向下滚动到标有Pix4Dmatic的部分,如果你还没有账户,请点击 "开始你的15天试用"。按照页面上的指示,完成账户的设置。
0:00
/
1×
现在你已经登录并有了许可证,再次进入Pix4Dmatic页面,下载应用程序。运行安装程序以完成设置。接下来,我们需要确保Pix4DMatic能够使用我们提供的GPU。要做到这一点,首先去你的系统设置,点击屏幕左下角的Windows按钮,然后点击 "齿轮 "符号,进入设置。在该窗口中,搜索 "图形设置 "并导航到该页面。从那里,进入 "添加应用程序 "部分,点击 "浏览",然后在Program Files/Pix4dmatic中找到你的 "pix4dmatic.exe"。将其添加到自定义图形设置菜单GUI中,选择 "高性能",以确保你的应用程序能够利用你的GPU。
为了设置我们的演示,我们需要完成的第二步是抓取一些示例数据,用于示例项目。幸运的是,Pix4D为其用户提供了一个强大的样本数据集和项目选择,我们可以为此目的使用。在你的核心机上打开链接,滚动到Pix4Dmatic部分。在今天的例子中,我们将下载并使用城市区域数据集。城市地区数据集是最初的10615张图像数据集的100张子集,"整个数据集的图像采集是用4架eBee X - senseFly无人机同时飞行完成的"[来源]。 下载并解压数据集。
把这个项目带入生活
装入数据
现在我们有了我们的数据和软件设置,我们可以开始我们的摄影测量任务了。加载应用程序,并点击文件>新建,在应用程序中启动一个新的项目。你可以把路径保留为默认的文件夹,但最好把项目重新命名,以代表工作的实例性质。
0:00
/
1×
现在在你的新项目中,我们可以通过简单地将包含数据集压缩文件内容的文件拖入窗口来加载我们的数据。然后,这将自动在地图特征空间中填充100张按地理位置组织的图像。
0:00
/
1×
接下来,我们要做的是分配地面控制点(GCPs),这个步骤有些随意。"GCPs是坐标已知的特征点。它们的坐标已经用传统的测量方法测量过了,或者从其他来源(LiDAR、该地区的旧地图或网络地图服务)获得。GCPs用于对项目进行地理参考并减少噪音。"[来源]虽然它们不是摄影测量任务成功的绝对需要,但它们对于提高我们输出对象的质量非常有用。
处理数据
在接下来的步骤中,请确保你已经激活了Pix4Dmatic的许可证。如果你没有,只有前两个处理选项可用,你将无法输出报告。
要处理我们现在上传并设置好的城市区域数据集,请选择屏幕右上方带有播放按钮的按钮。这将打开处理菜单。在顶部,你可以改变处理模板,以反映不同类型的无人机飞行和使用的图像捕获模式。在这种情况下,我们将使用默认的 "nadir"。
然后,它给你5个处理选项:校准、密集化、网格、DSM和正马赛克。你可以点击每个选项旁边的切换键,将它们添加到我们的处理工作流程中。让我们来讨论这些选项的作用。
校准
校准处理选项的作用是帮助Pix4Dmatic数据为其他处理选项做好准备,并通过进一步优化数据为未来的运行服务。在实践中,这意味着指定一个标定模板来决定使用哪些处理选项,一个管道允许用户控制相机的内部和外部参数,图像比例定义用于提取关键点的图像大小,一个确定提取关键点数量的设置,以及一个内部置信度指标来设置初始相机标定的置信度。 信心度决定了相机在标定期间可以重新标定和调整的程度。
密实化
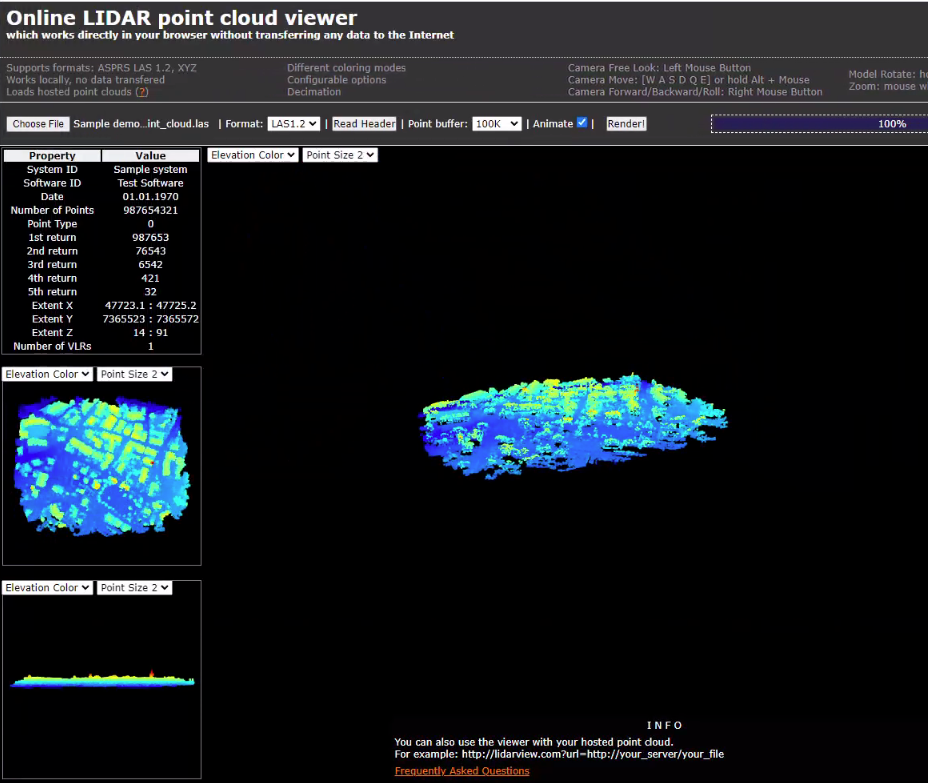
城市区域数据集的密集点云
Densify处理步骤从提交的数据中创建一个密集的点云。密集点云是三维物体建模的常见起点,由一系列关于特征空间中许多点的位置的测量值表示。 它们在摄影测量任务中通过测量图像表面的许多点来计算,然后使用这些距离来推断物体彼此之间的相对位置的现在三维理解。
网格

城市区域数据集的图像网格
在三维计算机图形和实体建模中,多边形网格是一个顶点、边缘和面的集合,定义了一个多面体物体的形状。在网格处理阶段,Pix4Dmatic会生成并提取我们特征空间中物体的网格表示。这个网格(一个.obj文件)随后可以在许多第三方应用程序中使用,如SculptGL或Blender。
数字表面模型(DSM)
一个来自Pix4D的DSM样本 -来源
DSM步骤将密集的点云作为输入,并为数字表面模型(DSM)的创建定义分辨率、启用表面平滑和插值。DSM被标记为感兴趣区域的2.5D模型。它可以被导出为两种不同类型的文件。光栅GeoTIFF或点云(.xyz, .las, .laz)。栅格GeoTIFF文件的每个像素和点云的每个点都包含3个维度的位移信息(X、Y、Z),但它们没有第四个维度来表示捕获的颜色。对于每个(X,Y)位置,DSM只有一个Z值(这个(X,Y)位置的最高点的高度)。
正射马赛克

城市地区数据集的正交马赛克。
正射马赛克是收集到的图像的二维表示,有关于绘图区域的X、Y和颜色值的信息。它与照相拼接的不同之处在于,正射法利用DSM消除了图像的透视变形。然而,这确实需要大量的匹配/关键点(超过1000个)来生成模型。实际上,正交马赛克纠正了相机的透视,并根据物体/地面的每个点与相机的距离,使用不同的比例来增强表示。这使得正交马赛克在进行测量时非常有用,因为创建物体时考虑到了图片中的物体彼此之间的相对距离和大小。
把它放在一起
在你点击开始运行处理之前,请注意在屏幕底部有一个额外的部分,名为 "导出"。这些输出将决定我们之后有哪些东西可以检查。例如,如果你需要一个输出的.obj文件或DSM GeoTIFF,请务必选择这些方框。否则,你可以暂时只输出质量报告,然后点击 "开始"。
0:00
/
1×
处理完毕后,我们可以开始环视我们新创建的城市区域数据集的三维表示。通过这样做,我们可以更好地了解这个模型是如何创建的。通过点击每个连接点,我们可以看到每个 "相机 "的不同角度在一起有一个直接的视线到点。每条不同的视线都为Pix4D提供了不同的信息,以用于创建这个三维表示。
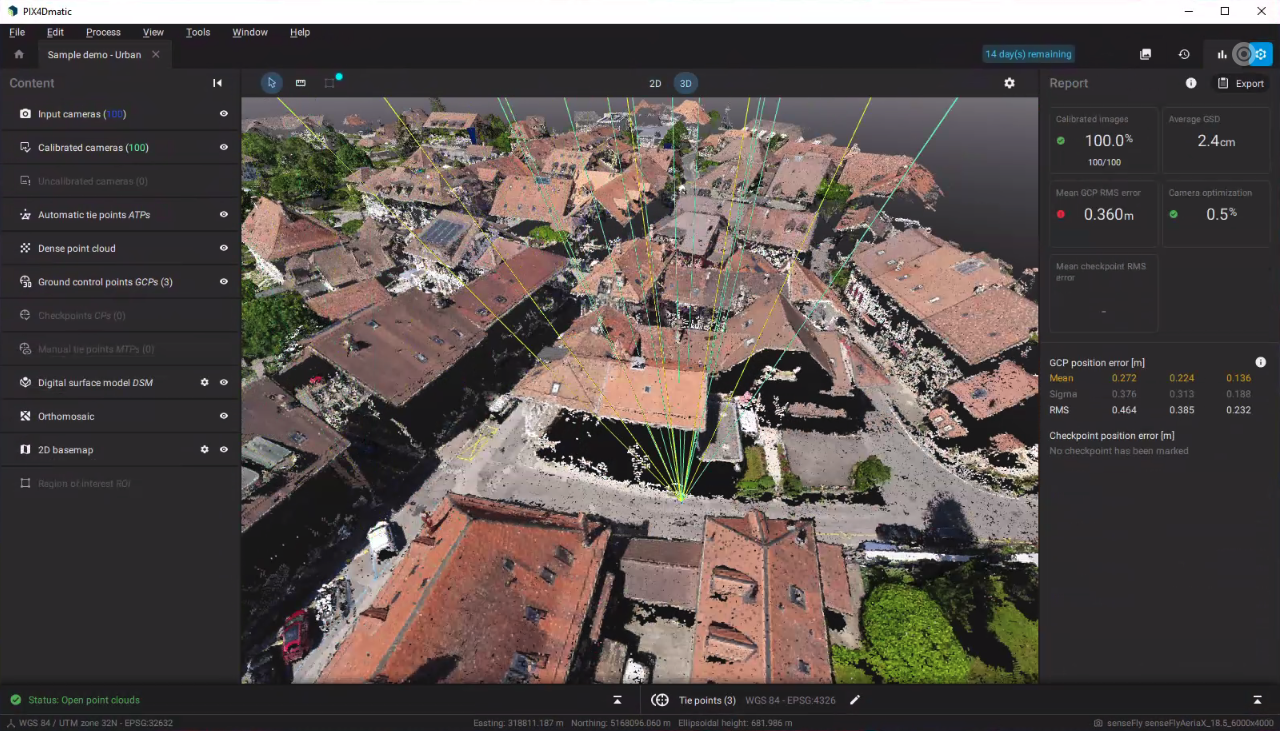
然而,上面的例子并不完美,我们可以看到,当我们放大时,有大段的模型是黑色或空白的。其原因有两个:第一,即使有广泛的相机网络,也不可能捕捉到每一点信息;第二,Pix4Dmatic的能力与多少台相机和GCP连接点的标记程度直接相关。通过点击窗口右上方的柱状图符号,我们可以进入评估我们信息提取质量的报告。我们可以看到,在所有使用的图像中,平均GCP RMS误差为0.36米。这是一个相当大的误差,我们可以通过退后一步,更准确地注释所有与GCP的连接点,来大规模地提高这个模型的输出。
检查我们处理过的数据
现在,我们的三维模型已经处理完毕,可以开始使用所提供的摄影测量工具对我们的图像进行测量。这就是Pix4D摄影测量的真正效用。通过软件进行测量,它可以节省有意义的时间和精力,亲自进行物理测量。它还允许像我们这样的人,在不同国家的电脑上,只用无人机和Pix4D强大的软件套件,在地球上进行同样的工作。
0:00
/
1×
你可以通过选择屏幕左上方菜单栏下面的标尺图标进行简单的测量。然后,只需在有关地点拖动鼠标,即可测量两点之间的距离。
结束语
Pix4dmatic是一个真正强大的工具,可以进行规模化的摄影测量。用户可以期待该应用程序能够处理成百上千的相机输入,以比Pix4dmapper更高的速度创建大型三维场景模型。如果你打算大规模地进行摄影测量,那么Pix4dmatic绝对是与你的Core机器一起运行的首推软件。
今天就为你的机器学习工作流程增加速度和简单性吧
