

用Rust进行嵌入式编程需要一个全新的知识库。使用Raspberry Pi Zero W,你可以快速启动并运行嵌入式Rust。
本文将从一个嵌入式的*"Hello World "*开始,然后推进到一个文本到Morse代码的翻译器,指导你完成这一过程:
如何设置Pi
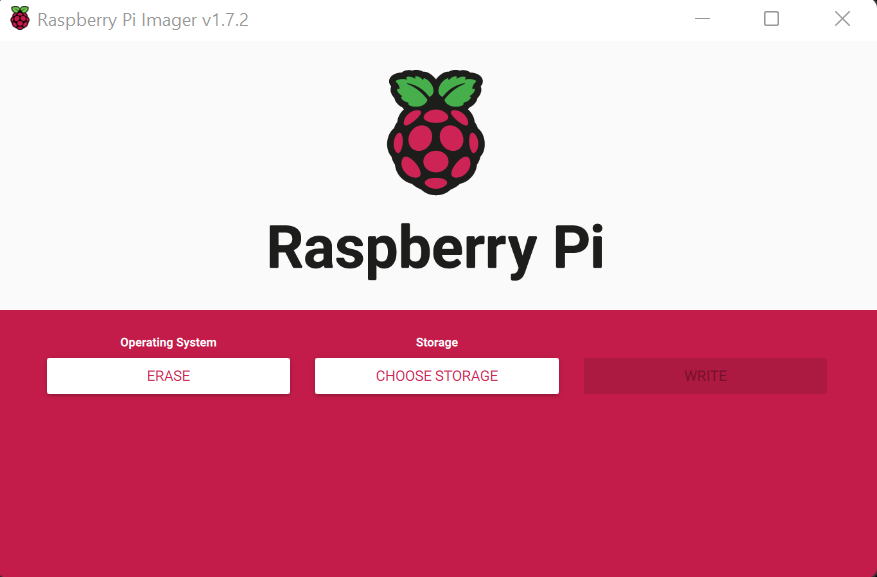
格式化SD卡
使用Raspberry Pi Imager,可以从Raspberry Pi软件网页上下载:
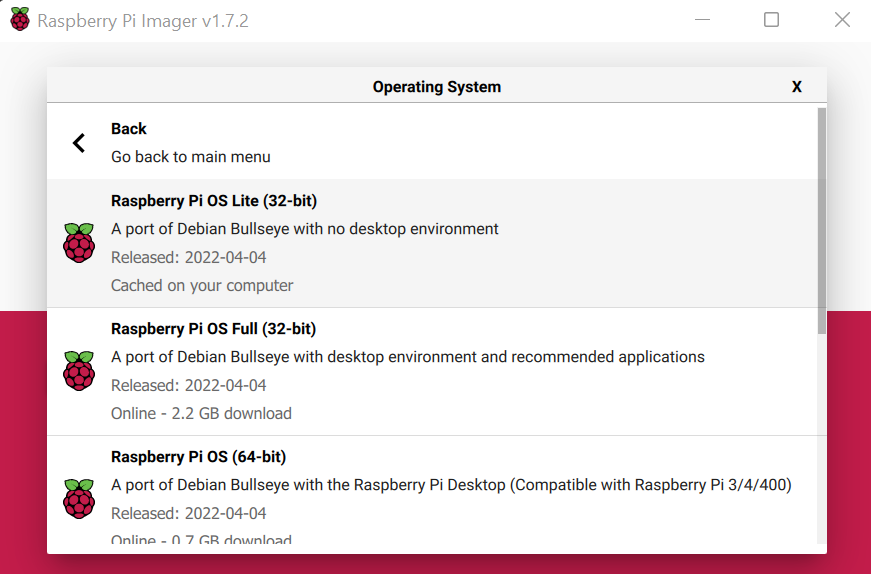
闪存发行版
我建议使用Raspberry Pi OS Lite。这是一个无头发行版,这意味着它没有图形用户界面:
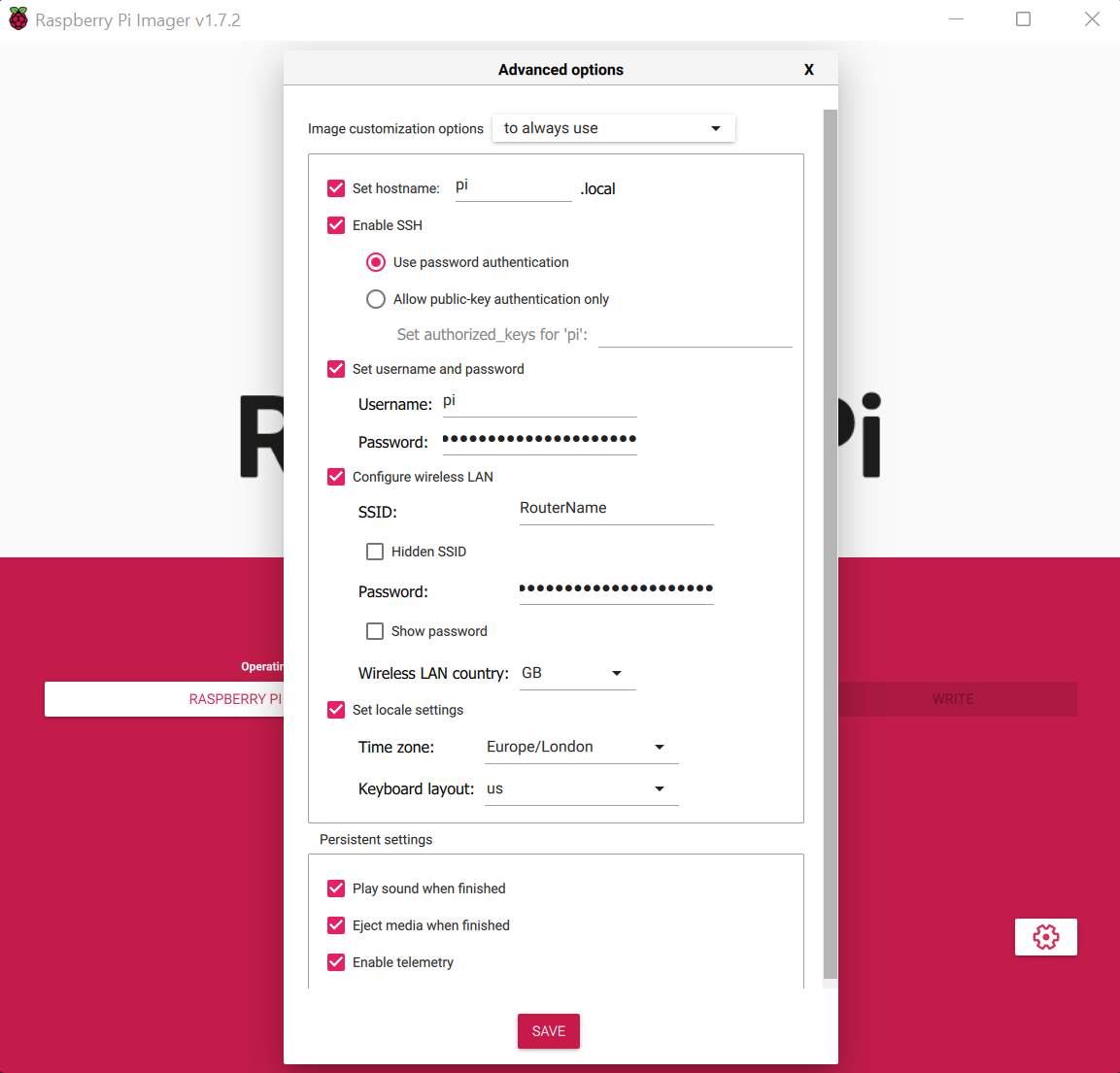
配置Wifi和SSH
一旦完成了这些,你就可以把SD卡插入Raspberry Pi,并给它通电。
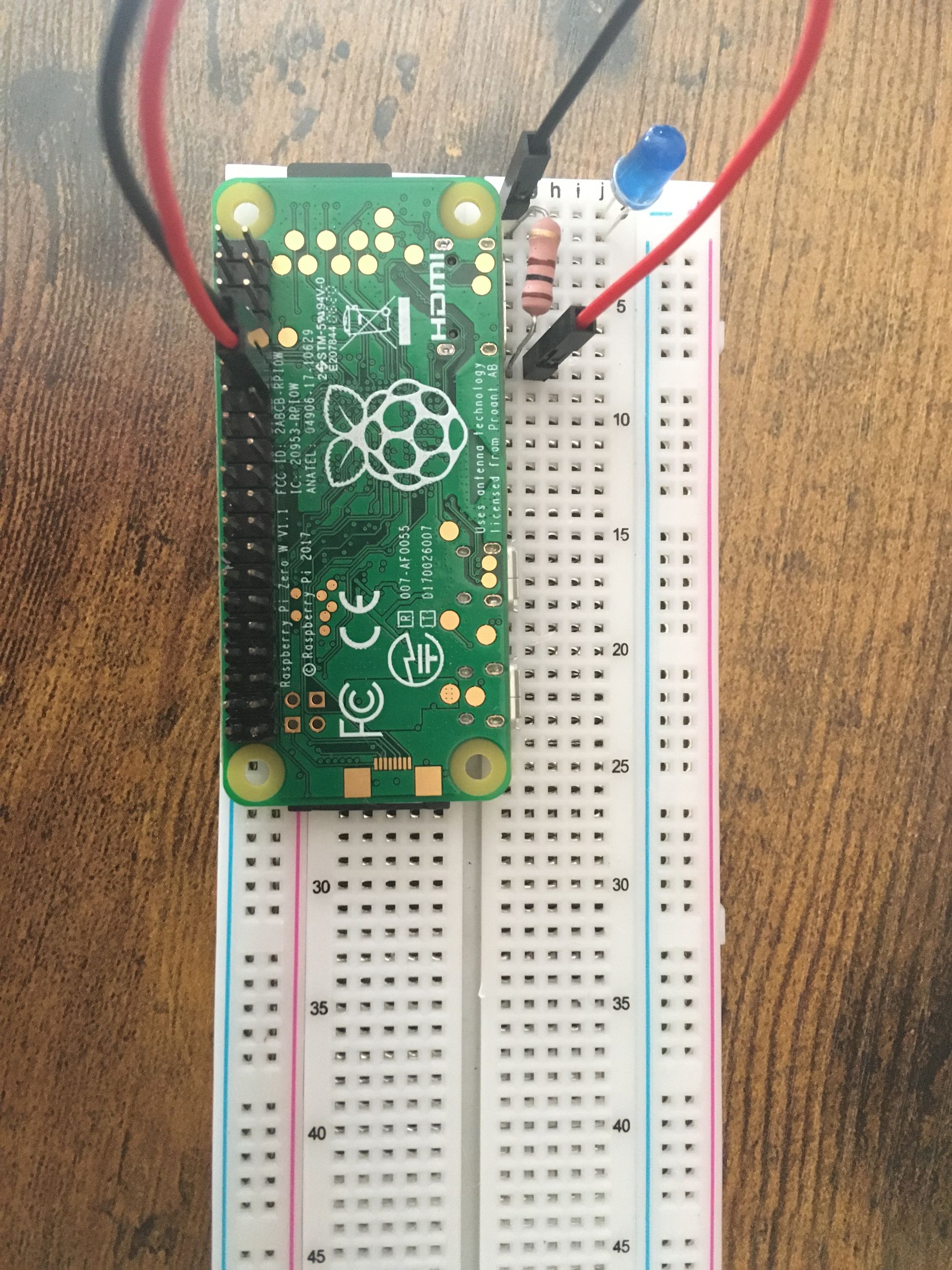
完成电路
电路图
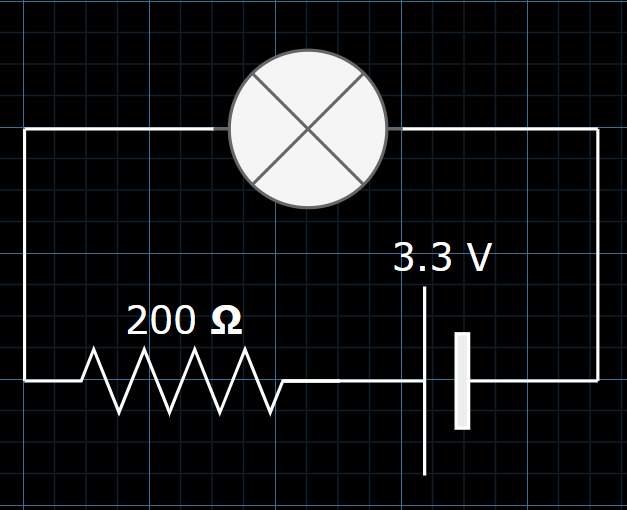
Pi的引脚
如下图所示,将负极连接到地,正极连接到BCM的第17针:
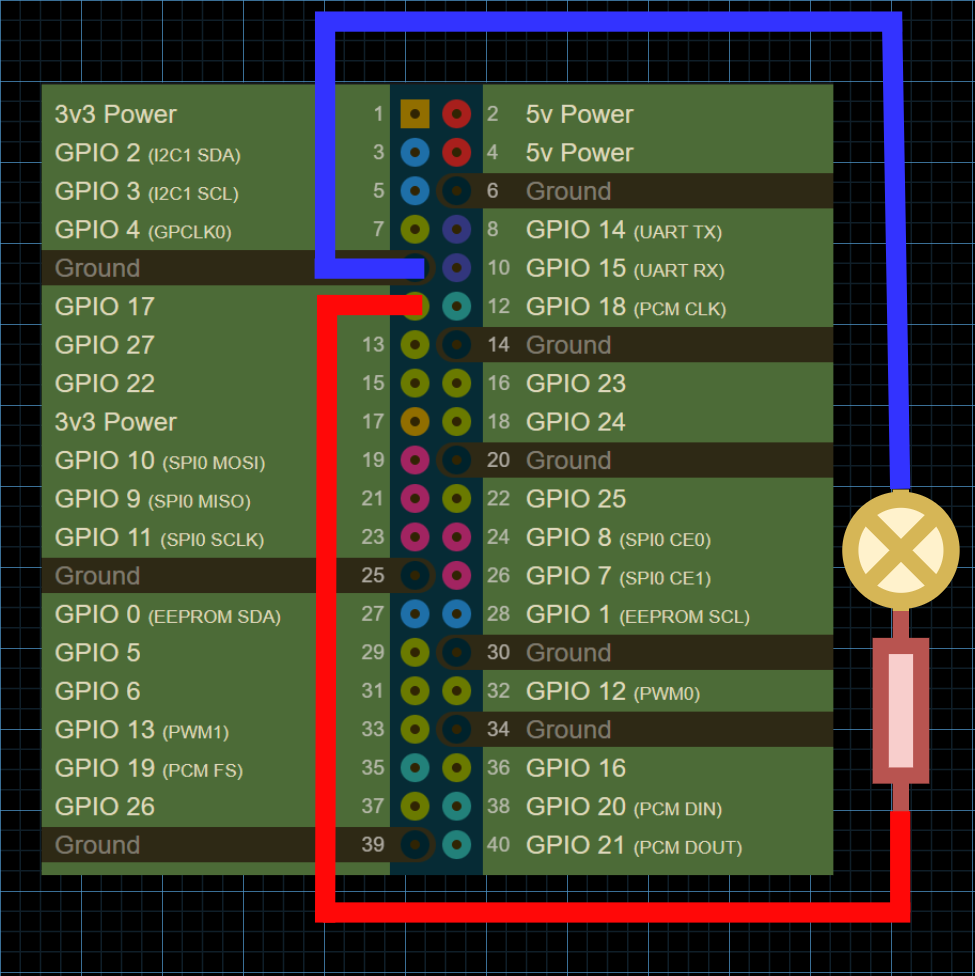
引脚图可以在这里看到:https://pinout.xyz/
如何设置交叉编译
安装目标
使用rustup ,为你的Raspberry Pi安装必要的目标:
my-pc$ rustup add target arm-unknown-linux-gnueabihf
关于Rust中目标的更多信息,请参见附录。
指定链接器
将raspberrypi/tools 仓库下载到一个名为rpi_tools 的目录中:
my-pc:~ $ git clone https://github.com/raspberrypi/tools $HOME/rpi_tools
使用你喜欢的文本编辑器编辑~/.cargo/config 文件:
my_pc:~ $ sudo nano ~/.cargo/config
告诉Cargo为你的目标使用一个特定的链接器版本:
[target.arm-unknown-linux-gnueabihf]
linker = "/rpi_tools/arm-bcm2708/arm-rpi-4.9.3-linux-gnueabihf/bin/arm-linux-gnueabihf-gcc"
如何为一个嵌入式的 "Hello World "编程
首先创建一个新的Rust项目,并在你喜欢的文本编辑器中打开main.rs 文件:
my-pc:~ $ cargo new blink
my-pc:~ $ cd blink
my-pc:~/blink $ nano src/main.rs
导入rust_gpiozero crate,并对一个LED进行编程,使其每秒在开和关之间交替进行:
use rust_gpiozero::*;
fn main() {
// Create a new LED attached to Pin 17
let mut led = LED::new(17);
led.blink(1.0, 1.0);
led.wait();
}
确保将依赖关系添加到Cargo.toml 文件中:
[dependencies]
rust-gpiozero = "0.2.1"
成功地退出程序
自rustc 1.61.0 [1]以来,您可以使用std::process::ExitCode 结构来指定返回给进程父代的状态代码:
use std::process::ExitCode;
fn main() -> ExitCode {
// ...
if error {
return ExitCode::from(1);
}
ExitCode::SUCCESS
}
否则,你可以简单地返回一个Result :
fn main() -> Result<(), std::io::Error> {
// ...
Ok(())
}
如何交叉编译程序
建立一个针对所需架构的程序版本:
my-pc:~/blink $ cargo build --release --target=arm-unknown-linux-gnueabihf
如何将二进制文件传输到Pi上
使用scp ,通过SSH将编译好的二进制文件从你的主机传输到Raspberry Pi:
my-pc:~/blink $ scp target/arm-unknown-linux-gnueabihf/release/blink pi@192.168.1.199:~/blink
注意:你的Pi的本地IP可能会有所不同。
如何用SSH进入Pi
通过Raspberry Pi的本地IP地址进行SSH并登录到它:
my-pc:~ $ ssh pi@192.168.1.199
运行程序
在Raspberry Pi上,运行编译好的二进制文件:
pi:~ $ ./blink
如何编写一个文本到摩尔斯代码的翻译器
下面是一个应用程序的例子,它可以逐行读取stdin,将输入的内容翻译成莫尔斯码,并根据字符的莫尔斯码来切换LED的开关:
use rust_gpiozero::*;
use std::io::{BufRead, self};
use std::collections::HashMap;
use std::thread::sleep;
use std::time::Duration;
fn main() -> Result<(), std::io::Error> {
println!("Starting...\n- Type in text to turn into Morse Code\n- Type `quit()` to quit\n");
// Create a new LED attached to Pin 17
let led = LED::new(17);
/// Length of a dot in milliseconds
const DOT_DELAY: u64 = 80;
/// Length of a dash in milliseconds
const DASH_DELAY: u64 = DOT_DELAY * 3;
/// Delay between inputs in milliseconds
const PUSH_DELAY: u64 = DOT_DELAY;
/// Delay between letters in milliseconds
const LETTER_DELAY: u64 = DOT_DELAY * 3;
/// Delay between words in milliseconds
const WORD_DELAY: u64 = DOT_DELAY * 7;
let morse_code_alphabet: HashMap<char, &'static str> =
[
('a', ".-"),
('b', "-..."),
('c', "-.-."),
('d', "-.."),
('e', "."),
('f', "..-."),
('g', "--."),
('h', "...."),
('i', ".."),
('j', ".---"),
('k', "-.-"),
('l', ".-.."),
('m', "--"),
('n', "-."),
('o', "---"),
('p', ".--."),
('q', "--.-"),
('r', ".-."),
('s', "..."),
('t', "-"),
('u', "..-"),
('v', "...-"),
('w', ".--"),
('x', "-..-"),
('y', "-.--"),
('z', "--.."),
('1', ".----"),
('2', "..---"),
('3', "...--"),
('4', "....-"),
('5', "....."),
('6', "-...."),
('7', "--..."),
('8', "---.."),
('9', "----."),
('0', "-----"),
('.', ".-.-.-"),
(',', "--..--"),
('?', "..--.."),
('\'', ".----."),
('!', "-.-.--"),
('/', "-..-."),
('(', "-.--."),
(')', "-.--.-"),
('&', ".-..."),
(':', "---..."),
(';', "-.-.-."),
('=', "-...-"),
('+', ".-.-."),
('-', "-....-"),
('_', "..--.-"),
('"', ".-..-."),
('$', "...-..-"),
('@', ".--.-."),
(' ', " "),
].iter().cloned().collect();
// Read standard input per line
for line_res in io::stdin().lock().lines() {
let line = line_res?;
if line == "quit()" {
break;
}
// Turn line into morse code
let mut morse = String::new();
for c in line.chars() {
if let Some(morse_code_char) = morse_code_alphabet.get(&c) {
morse.push_str(morse_code_char);
// Separate characters with a comma
morse.push_str(",");
}
}
// Blink LED based on characters
for c in morse.chars() {
match c {
'.' => {
led.on();
sleep(Duration::from_millis(DOT_DELAY));
led.off();
sleep(Duration::from_millis(PUSH_DELAY));
},
'-' => {
led.on();
sleep(Duration::from_millis(DASH_DELAY));
led.off();
sleep(Duration::from_millis(PUSH_DELAY));
},
',' => {
sleep(Duration::from_millis(LETTER_DELAY));
},
' ' => {
sleep(Duration::from_millis(WORD_DELAY));
},
_ => {
println!("Unknown character: {}", c);
break;
}
}
}
sleep(Duration::from_millis(WORD_DELAY));
}
// Free the variable and associated resources
led.close();
Ok(())
}
附录
目标
在Rust中,目标是指程序所编译的平台(架构)。Cargo会根据文件系统的布局自动检测目标[2]。
你可以看到内置目标的列表,通过运行:
rustc --print target-list
# OR
rustup target list
在这里,你可以通过运行以下命令来为你的项目添加一个新的目标:
rustup target add <target>
给定的目标通常是以三重形式出现的[3]:
- 架构
- 供应商
- 操作系统类型
- 环境类型
这被称为 "目标三要素",因为第四部分是可选的。
