


Matlab矩阵反演简介
下面的文章提供了Matlab矩阵反演的概要。任何矩阵的逆向,"M "被定义为一个矩阵,当它与矩阵M相乘时,输出的是一个身份矩阵。逆矩阵用符号M-1表示。 因此,根据定义,如果我们将M与M-1相乘,我们将得到一个身份矩阵的输出。矩阵要有逆矩阵的前提条件是它必须是一个方阵,而且矩阵的行列式不应等于零。
在Matlab中获取矩阵的逆的语法。
I = inv (M)
说明:
- I = inv (M) 用于获取输入矩阵M的逆值。请记住,这里的 "M "必须是一个方阵。
Matlab 矩阵逆运算的例子
下面是Matlab矩阵逆运算的例子。
例子 #1
在第一个例子中,我们将得到一个2X2矩阵的逆运算。
以下是本例中的步骤。
- 定义我们要计算的矩阵的逆值。
- 将该矩阵作为输入传给逆函数。
- 通过将输入矩阵与输出矩阵相乘来验证结果。这应该会得到一个相同的矩阵作为输出。
代码:
M = [3 2 ; 2 1];
[创建一个2 X 2的正方形矩阵] [将输入矩阵传递给函数inv] [请注意,由于我们使用2 X 2的矩阵作为输入,我们的输出矩阵也是2 X 2的矩阵。
I = inv(M)
[将输入矩阵传递给函数inv] [请注意,由于我们使用了一个2 x 2的矩阵作为输入,我们的输出矩阵也将是一个2 x 2的矩阵。当与输入矩阵相乘时,将得到一个相同的矩阵作为输出]。
I*M
[验证'I'是'M'的逆的代码。这应该会得到一个相同的矩阵作为输出]。
这就是我们的输入和输出在MATLAB命令窗口中的样子。
输入:
M = [3 2 ; 2 1];
I = inv(M)
I*M
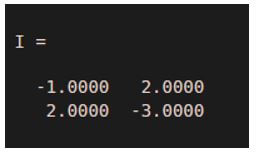
输出1: (逆矩阵)
输出 2: (这应该是一个身份矩阵)

正如我们在输出1中看到的,函数'inv'已经给了我们输入矩阵的逆值。输出2验证了'I'是'M'的逆数。
例子 #2
在这个例子中,我们将得到一个3X3矩阵的逆值。
以下是本例的步骤。
- 定义我们想要计算的3X3矩阵的逆值。
- 将该矩阵作为输入传给求逆函数。
- 通过将输入矩阵与输出矩阵相乘来验证结果。这应该给出一个相同的矩阵作为输出。
代码:
M = [3 2 3; 4 2 1; 3 4 1];
[创建一个3 X 3的正方形矩阵] [将3 X 3的输入矩阵传递给函数inv] [请注意,由于我们使用3 X 3的矩阵作为输入,我们的输出矩阵也将是3 X 3矩阵。
I = inv(M)
[将3X3的输入矩阵传递给函数inv] [请注意,由于我们使用了3X3的矩阵作为输入,我们的输出矩阵也将是一个3X3的矩阵。当与输入矩阵相乘时,将得到一个相同的矩阵作为输出]。
I*M
[用代码验证'I'是'M'的逆数。这应该会得到一个相同的矩阵作为输出]。
这就是我们的输入和输出在MATLAB命令窗口中的样子。
输入:
M = [3 2 3; 4 2 1; 3 4 1];
I = inv(M)
I*M
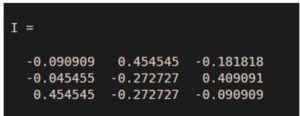
输出 1: (逆矩阵)
输出 2: (这应该是一个身份矩阵)
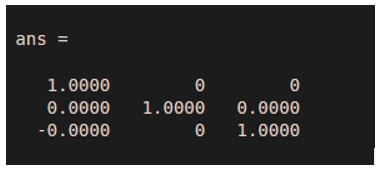
正如我们在输出1中看到的,函数'inv'已经给了我们输入矩阵的逆值。输出2验证了'I'是'M'的逆数。
例子 #3
在这个例子中,我们将得到一个4X4矩阵的逆值。
以下是本例的步骤。
- 定义我们想要计算的4X4矩阵的逆值。
- 将该矩阵作为输入传给求逆函数。
- 通过将输入矩阵与输出矩阵相乘来验证结果。这应该给出一个相同的矩阵作为输出。
代码:
M = [1 3 3 6; 4 2 8 2; 3 3 4 5; 2 6 3 1];
[创建一个4X4的正方形矩阵] [将4X4的输入矩阵传递给函数inv][请注意,由于我们使用4X4的矩阵作为输入,我们的输出矩阵也将是4X4矩阵。
I = inv(M)
[将4X4的输入矩阵传递给函数inv] [请注意,由于我们使用了4X4的矩阵作为输入,我们的输出矩阵也将是一个4X4的矩阵。当与输入矩阵相乘时,将得到一个相同的矩阵作为输出] [请注意,由于我们使用了4×4矩阵作为输入,我们的输出矩阵也将是一个4×4的矩阵。
I*M
[用代码验证'I'是'M'的逆数。这应该会得到一个相同的矩阵作为输出]。
这就是我们的输入和输出在MATLAB命令窗口中的样子。
输入:
M = [1 3 3 6; 4 2 8 2; 3 3 4 5; 2 6 3 1];
I = inv(M)
I*M
输出 1: (逆向矩阵)

输出 2: (这应该是一个身份矩阵)
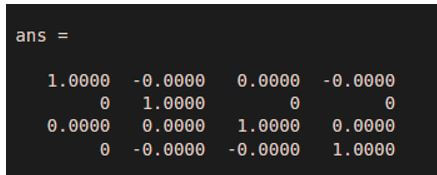
正如我们在输出1中看到的,函数'inv'已经给了我们输入矩阵的逆值。输出2验证了'I'是'M'的逆。
结论
对任何矩阵的逆运算,'M'被定义为一个矩阵,当它与矩阵M相乘时,输出的是一个相同的矩阵。我们使用Matlab中的函数'inv'来获得矩阵的逆。我们只能找到一个正方形矩阵的逆值。
