本文已参与「新人创作礼」活动,一起开启掘金创作之路。
对于一个变换矩阵 T,具体的定义因人而异,例如一个变换 Twc,代表了从相机坐标系到世界坐标系的变换,但是其基准(base)坐标系有时候定义为 w,也可以定义为 c,基准坐标系的不同,直接导致变换相反。
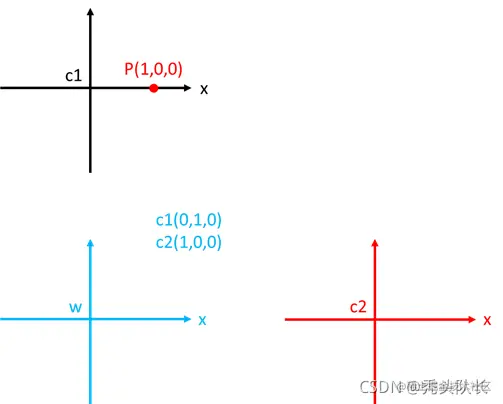
例如对于下图中的三个简单的坐标系,分别为相机坐标系 c1,c2,世界坐标系 w,其中点 P 在坐标系 c1 下。接下来定义变换矩阵,为了简化计算,其中三个坐标系没有旋转,只需要考虑平移。
- 对于变换矩阵 Tcw,理解为
world到camera的变换,如果以 camera 为基准坐标系,所以如果想将点 P 旋转到 c2 坐标系下,那么变换矩阵的定义:
Tc1w=⎣⎡1000010000100−101⎦⎤Tc2w=⎣⎡100001000010−1001⎦⎤Tc2c1=⎣⎡100001000010−1101⎦⎤
那么将一个点从 c1 坐标系转换到 c2 坐标系,需要先转换到世界坐标系。那么如下:
c2P=Tc2wTwc1c1P=Tc2wTc1w−1c1P=⎣⎡100001000010−1001⎦⎤⎣⎡1000010000100101⎦⎤⎣⎡1001⎦⎤
=⎣⎡100001000010−1101⎦⎤⎣⎡1001⎦⎤=⎣⎡0101⎦⎤
- 那么对于变换矩阵 Tcw,理解为
world到camera的变换,如果以 world 为基准坐标系,所以如果想将点 P 旋转到 c2 坐标系下,那么变换矩阵的定义:
Tc1w=⎣⎡1000010000100101⎦⎤Tc2w=⎣⎡1000010000101001⎦⎤Tc2c1=⎣⎡1000010000101−101⎦⎤
对于点P,假设其姿态与c1坐标系一致,则
Tpc1=⎣⎡1000010000101001⎦⎤
那么可以得到,从c2到P的变换,等于从c2到c1的变换乘c1到P的变换:
Tpc2=Tc1c2Tpc1=⎣⎡100001000010−1101⎦⎤⎣⎡1000010000101001⎦⎤=⎣⎡1000010000100101⎦⎤
所以在c2坐标系下,P点的坐标为(0,1,0)
对于上面两种定义方式,都可以求得正确的结果,但是定义不同,计算方式就不同。
旋转的左乘与右乘未完待更...


