一起养成写作习惯!这是我参与「掘金日新计划 · 4 月更文挑战」的第8天,点击查看活动详情。
title: 机器视觉 -3.2- 简单几何性质
mathjax: true
date: 2021-08-27 17:09:19
tags: [Image_Processing, Robot_vision]
categories: [Image_Processing, Robot_vision]
本文记录《机器视觉》 第三章第二节 —— 简单几何性质,一些学习笔记和个人理解,其中核心内容为二值图的转动惯量求解。
我们已经有了一组二值图,我们可以根据二值图来确定其表示物体的简单几何性质。
特征函数
二值图的特征函数 b(x,y)比较简单,当[x,y]处有物体时值为1,否则为0
面积
A=∬Ib(x,y)dxdy(1)
可以认为是二值图的 0 阶矩的物理意义。
质心
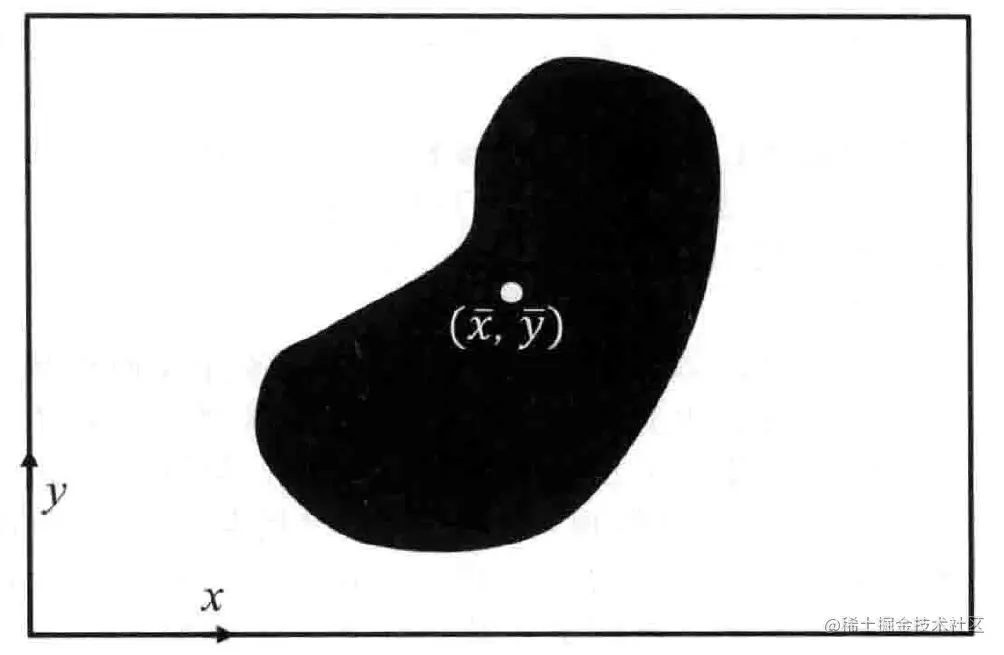
空间位置按照密度加权平均即是质心的位置 (xˉ,yˉ):
xˉ∬Ib(x,y)dxdy=∬Ixb(x,y)dxdy(2)
yˉ∬Ib(x,y)dxdy=∬Iyb(x,y)dxdy(3)
可以认为是二值图的 1 阶矩(静力矩)物理意义。
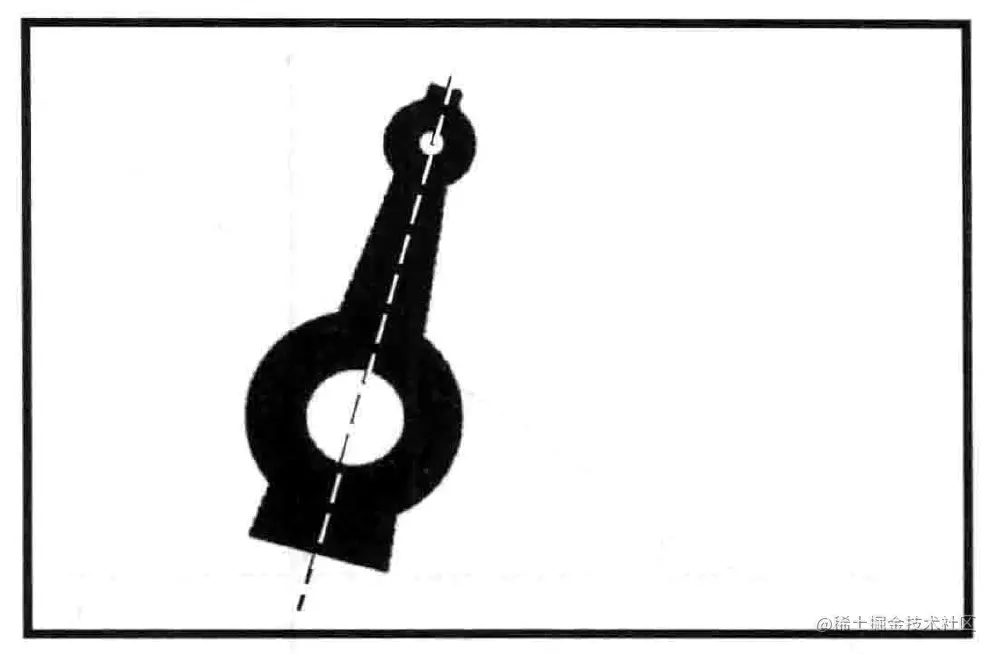
朝向
-
如果我们想要知道二值图物体表示的朝向,则需要用到转动惯量的概念。如果找到了使得物体转动惯量最小的轴,那么这个轴向就是物体的朝向。
-
在当前图像为二维的情况下,转动惯量是物体针对某条直线,将物体上的每个点到直线距离的平方按照密度计算积分,即得到了图像关于该轴向的转动惯量值。
-
我们的任务是为给定的二值图物体找到使得其转动惯量最小的直线。
-
转动惯量计算方法:
E=∬Ir2b(x,y)dxdy\label4(4)
- 其中 r 表示二值图上的点到直线的距离,虽然还没有这条直线
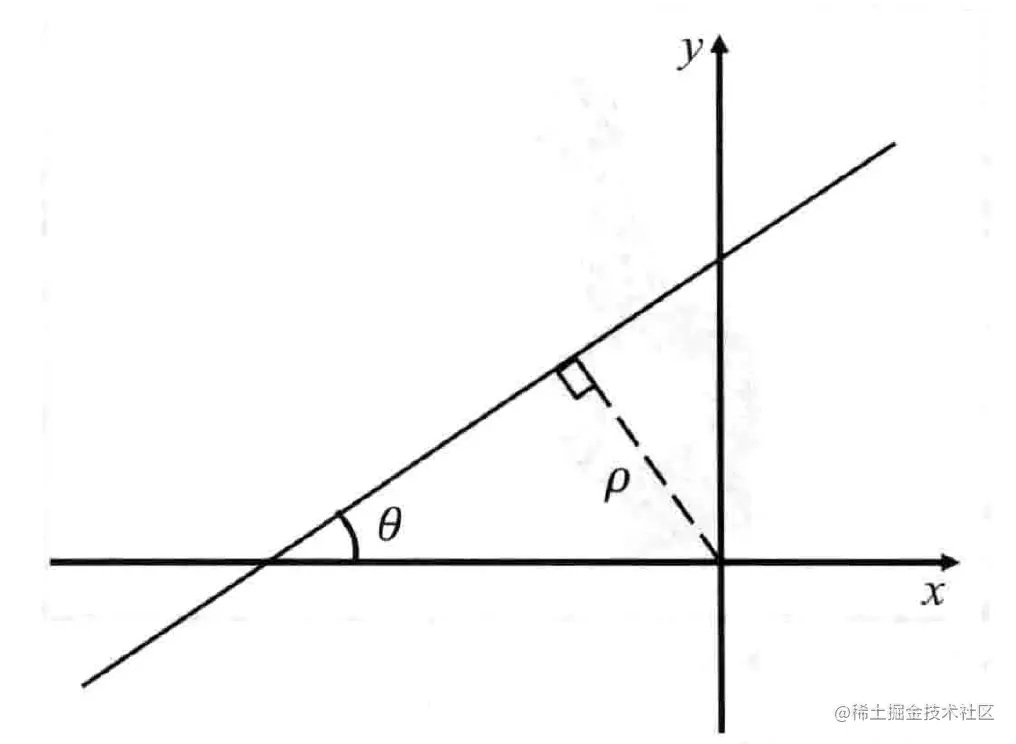
直线建模
-
为我们的目标直线建模,取2个参数
- 原点到直线的距离 ρ
- 直线和 x 轴之间(沿逆时针方向)的夹角 θ
-
这种建模方式有一些方便之处:
- 当坐标系平移或旋转时,这两个参数的变化是连续的
- 当直线平行(或近似平行)于某个坐标轴时,用这两个参数来表示直线也不会产生问题(相比于:使用斜率和截距来表示直线的情况)
-
使用这两个参数,可以将直线方程写为如下形式:
xsinθ−ycosθ+ρ=0\label5(5)
- 在直线上,距离原点最近的点(−ρsinθ,+ρcosθ),通过这个点,沿着夹角 θ 运动任意距离s 的点仍在直线上,因此可以将直线上任意一点(x0,y0)表示为:
x0=−ρsinθ+scosθy0=+ρcosθ+ssinθ\label6(6)
最短距离
- 回到我们的二值图,在给定直线方程的情况下,二值图上一点(x,y),直线上距离其最近的点(x0,y0),二者距离显然可以表示为:
{%raw%}
r2=(x−x0)2+(y−y0)2\label7(7)
{%endraw%}
- 将直线上点公式\eqref6代入,得到:
{%raw%}
r2=x2+y2+ρ2+2ρ(xsinθ−ycosθ)−2s(xcosθ+ysinθ)+s2\label8(8)
{%endraw%}
- 对于每个点,我们都需要解\eqref8这样的优化方程
- 即给定了x,y,ρ,θ,求解使得r最小的s,我们在$$\eqref{8}中对s求导,可得:
s=xcosθ+ysinθ\label9(9)
- 将\eqref9带入\eqref6,二值图上(x,y)到直线上距离最近的点(x0,y0)可得到关系为:
{%raw%}
x−x0=+sinθ(xsinθ−ycosθ+ρ)y−y0=−cosθ(xsinθ−ycosθ+ρ)\label10(10)
{%endraw%}
- 将\eqref10带入 \eqref7可得:
r2=(xsinθ−ycosθ+ρ)2\label11(11)
- 此处可以看到,将某点(x,y)带入\eqref5,得到值的绝对值即为该点到直线的垂线(最短)距离。
二阶矩轴向通过质心
- 我们已经得到了二值图上一点到任意直线的距离计算方法,将\eqref11带入\eqref4,得到:
{%raw%}
E=∬I(xsinθ−ycosθ+ρ)2b(x,y)dxdy=∬I[(xsinθ−ycosθ)2+ρ2+2ρ(xsinθ−ycosθ)]b(x,y)dxdy=[(xsinθ−ycosθ)2+ρ2]∬Ib(x,y)dxdy+2ρsinθ∬Ixb(x,y)dxdy−2ρcosθ∬Iyb(x,y)dxdy(12)
{%endraw%}
(xˉsinθ−yˉcosθ+ρ)A=0(13)
- 其中,A是区域面积,而是区域质心。因此,我们得到了结论:
最小二阶矩所对应的轴一定经过区域重心!
确定轴向倾角
我们已经确定该轴经过一个确定的点(xˉ,yˉ)了,仅需要再确定直线倾角即可。
- 将二值图平移到原点与质心重合的位置,那么我们要求得的就是一条穿过原点的直接倾角
- 也就是直接去除 ρ 参数的影响
- 转动惯量计算方式如下:
E=∬I(x′sinθ−y′cosθ)2b(x′,y′)dx′dy′(14)
其中,我们定义平移后的二值图I′上点的坐标为(x′,y′)。
{%raw%}
E=asin2θ−bsinθcosθ+ccos2θ其中:a=∬I′(x′)2b(x′,y′)dx′dy′b=2∬I′(x′y′)b(x′,y′)dx′dy′c=∬I′(y′)2b(x′,y′)dx′dy′\label15(15)
{%endraw%}
E=21(a+c)−21(a−c)cos2θ−21bsin2θ(16)
- 上式对θ求导,并令求导结果等于零
- 假设a=c,我们可以得到:
tan2θ=a−cb\label17(17)
- 因此除非出现b=0 并且 a=c 的情况, 否则, 我们最终可以得到:
{%raw%}
sin2θ=±b2+(a−c)2bcos2θ=±b2+(a−c)2a−c(18)
{%endraw%}
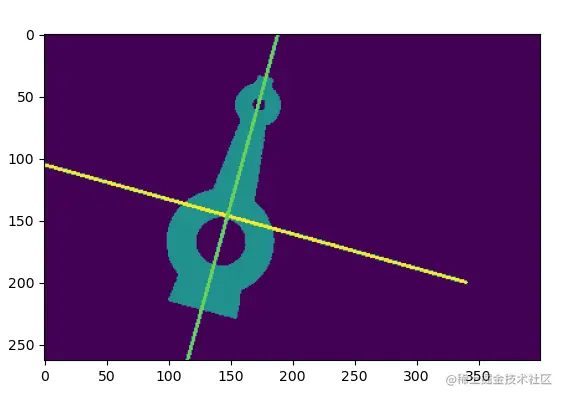
- 至此我们已经求出了使得该二值图转动惯量最小和最大的两个轴
- E 的的最小值和最大值的比值,给出了一些关于物体有“多么圆”的信息。对于直线,这个比值是0对于圆,这个比值是1。
拉格朗日
从式\eqref15开始,事实上我们要解的就是一个带约束的优化方程组,可以使用拉格朗日乘数法求解:
{%raw%}
E=ax2−bxy+cy2s.t.x2+y2−1=0\label19(19)
{%endraw%}
- 将E设为f(x,y),约束条件设为g(x,y)=0,构建拉格朗日方程:
L(x,y)=ax2−bxy+cy2+λ(x2+y2−1)(20)
{%raw%}
⎩⎨⎧∂x∂f+λ∂x∂g=0∂y∂f+λ∂y∂g=0g(x,y)=0→⎩⎨⎧2ax−by+2λx=02by−bx+2λy=0x2+y2=1(21)
{%endraw%}
- 重新令 x=sinθ,y=conθ可得:
{%raw%}
2a−btanθ1=2c−btanθb(tan2θ−1)+2(a−c)tanθ=0a−cb=tan2θ−12tanθ=tan2θ(22)
{%endraw%}
- 即推出\eqref17相同结论。
特征向量
可以将\eqref19看作是一个二次型优化问题,原带约束的方程可以写成:
{%raw%}
\begin{array}{*{20}{l}}
{E = {{\bf{s}}^T}{\bf{As}}}\\
{s.t.1-{{\bf{s}}^T}{\bf{Is}} = 0}
\end{array} \tag{23}
{%endraw%}
- 其中: {%raw%}s=(xy){%endraw%},{%raw%}{\bf{A}} = \left( \begin{array}{l}
\begin{array}{*{20}{c}}
a&{\frac{b}{2}}
\end{array}\\
\begin{array}{*{20}{c}}
{\frac{b}{2}}&c
\end{array}
\end{array} \right){%endraw%},I为二阶单位阵
- 那么拉格朗日方程可以写成:
{%raw%}
L=sTAs−λ(1−sTIs)(24)
{%endraw%}
{%raw%}
∂s∂L=2As−2λIs=0As=λs\label25(25)
{%endraw%}
- 而式\eqref25就是在寻找矩阵A的特征向量和特征值。
- 也就是说,对于给定的二值图,求解其对应的a,b,c,构造出矩阵A,求解A的特征向量即是寻找最大、最小转动惯量的方向。
- 二者大小的比值也类似于特征值的比值,也就是矩阵的条件数。
参考示例
import math
import cv2
import numpy as np
import matplotlib.pyplot as plt
from numpy.lib.function_base import iterable
def vvd_round(num):
if iterable(num):
return np.round(np.array(num)).astype('int32').tolist()
return int(round(num))
def show_image(image):
plt.imshow(image.astype('uint8'))
plt.show()
pass
def gravity_center(mask):
Ys, Xs = mask.nonzero()
A = (mask > 0).sum()
C_X = (Xs).sum() / A
C_Y = (Ys).sum() / A
return C_X, C_Y
def load_gray_image(image_path):
image = cv2.imread(image_path)
image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
image = (image == 0).astype('uint8') * 255
return image
def moment_of_inertia(mask, center):
temp_image = mask.copy().astype('uint8') * 128
C_X, C_Y = center
Ys, Xs = mask.nonzero()
Ys = (Ys - C_Y) / 100
Xs = (Xs - C_X) / 100
a = (Xs * Xs).sum()
b = 2 * (Xs * Ys).sum()
c = (Ys * Ys).sum()
if b == 0:
theta = 0
elif a == c:
theta = - np.pi * 0.5 * 0.5
else:
theta = - math.atan(b / (a - c)) / 2
point_1 = vvd_round([C_X + math.cos(theta) * 200, C_Y - math.sin(theta) * 200])
point_2 = vvd_round([C_X - math.cos(theta) * 200, C_Y + math.sin(theta) * 200])
temp_image = cv2.line(temp_image.astype('uint8'), point_1, point_2, 255, 2)
point_1 = vvd_round([C_X + math.cos(theta + 0.5 * np.pi) * 200, C_Y - math.sin(theta + 0.5 * np.pi) * 200])
point_2 = vvd_round([C_X - math.cos(theta + 0.5 * np.pi) * 200, C_Y + math.sin(theta + 0.5 * np.pi) * 200])
temp_image = cv2.line(temp_image.astype('uint8'), point_1, point_2, 200, 2)
theta_1 = theta
theta_2 = theta + 0.5 * np.pi
E_1 =(math.sin(theta_1)) ** 2 * a - b * math.sin(theta_1) * math.cos(theta_1) + c * (math.cos(theta_1)) ** 2
E_2 =(math.sin(theta_2)) ** 2 * a - b * math.sin(theta_2) * math.cos(theta_2) + c * (math.cos(theta_2)) ** 2
return temp_image, min(E_2, E_1) / max(E_2, E_1, 1)
if __name__ == '__main__':
image_path = 'test.png'
image = load_gray_image(image_path)
center = gravity_center(image)
temp_image, rate = moment_of_inertia(image, center)
show_image(temp_image)
pass
参考资料
- 伯特霍尔德・霍恩著BERTHOLDKLAUSPAULHORN. 机器视觉[M]. 中国青年出版社, 2014.

