本文已参与「新人创作礼」活动,一起开启掘金创作之路。
有一个自动售货机(Beverage Vending Machine),现在需要设计一个模型,计数苏打水(soda)和啤酒(beer)的数量,如果自动售货机是空的,则返回插入的硬币(coin)
- Data-Dependent Systems和TS模型不同的是,这里用位置(Location)替换TS的状态,用转移条件(Conditional transition)替换TS的转换关系。
对于自动售货机:
- 状态: start, select
- 条件转移:
- 从初始位置投入硬币后,转变为等待选择饮料位置
startture : coinselect
- 从初始位置填满苏打和啤酒后,位置仍然为初始位置
startture : ture:refillstart
start表示售货机处于初始位置
select表示售货机处于已完成投币,等待选择饮料的位置
转移条件g:α
在自动售货机ture:coin和ture:refill,他们是转移条件,表示为g:α
- g表示一个布尔状态
- α表示一个动作,只有当g为true的时候,才会执行动作α,否则什么也不会执行
我们可以再看一些其他的条件转移过程:
- 当苏打饮料的数量大于0的时候,执行sget动作获取苏打饮料
startnsoda > 0 : sgetstart
- 当啤酒的数量大于0的时候,执行bget动作获取啤酒
startnbeer > 0 : bgetstart
- 当苏打饮料和啤酒的数量为空的时候,执行ret_coin动作退回投入的硬币
startnsoda = 0∧nbeer = 0 : ret_coinstart
不同动作产生的不同影响:
| 动作 | 说明 | 影响 |
|---|
| coin | 投入硬币 | 无 |
| ret_coin | 退回硬币 | 无 |
| refill | 重新填满苏打和啤酒 | nsoda := max;nbeer := max |
| sget | 获取一瓶苏打 | nsoda := nsoda -1 |
| bget | 获取一瓶啤酒 | nbeer := nbeer -1 |
nsode表示苏打的数量,nbeer 表示啤酒的数量
具备类型的变量(typed variable)
-
概念:一个标准化的类型(如整数、布尔值、字符等)将和变量相关联以对系统建模
-
Var:前面的例子中 nsoda和nbeer都属typed variable,简称变量(Var)。
-
dom(x):每个变量x的取值范围记作域(dom)。对数字电路而言,变量的取值只能是0或者1,但对于软件而言,变量的取值范围可能非常大(如考虑程序内整数的范围),这时没法再用域做有效的限制,所以引出域的概念。对于n个变量x=(x1,x2,...,xn),其域为D=(D1×D2×...×Dn)
-
Eval(Var):对所有变量的定值,所有可能结果的集合记作Eval(Var),其中的一种定值方式记作映射η,如对变量x的定值即记作 η(x)。
-
Cond(Var):在变量上设置的所有条件的集合,记作Cond(Var)
-
Effect:动作对变量的影响是动作作用于变量原值,再得到变量新值的这样一个映射,即 Act×Eval(Var)→Eval(Var)
-
范例:以一个动作α:x:=y+5为例,初始时对变量x和y的求值η(x)=17,η(y)=−2
如果对x执行α动作,则x的值最终等于y+5,也就是-2+5=3
Effect(α,η)(x)=η(y)+5=−2+5=3
如果对y执行α动作,因为α只对x的值进行修改,不对y的值进行修改,所以y的值仍然为-2
Effect(α,η)(y)=η(y)=−2
程序图 (Program Graph,简称PG)
- 概念:有向图,连接不同结点的边被标记为变量和动作,结点标记为位置。
- 行动action的效果是通过映射来形式化的,比如上面具备类型的变量的那个范例:
- Effect:Act×Eval(Var)↪Eval(Var)
- α action x:=y+5
- η evaluation η(x)=17,η(y)=−2
- Effect(α,η)(x)=η(y)+5=−2+5=3
- Effect(α,η)(y)=η(y)=−2
- PG是一个六元组PG=(Loc,Act,Effect,↪,Loc0,g0)
- Loc是一系列位置的集合
- Act是一系列动作的集合
- Effect是Act×Eval(Var)→Eval(Var)
- ↪⊆Loc×Cond(Var)×Act×Loc,是一个关系转移条件
- Loc0⊆Loc:是一系列初始位置的集合
- g0∈Cond(Var):是一系列初始条件的集合
- 在之前的自动售货机的范例中
- Loc={start,select}
- Loc0={start} Var={nsoda,nbeer}
- Act={bget,sget,coin,ret_coin,refill}
- g0={nsoda=max∧nbeer=max} ,表示刚开始,苏打和啤酒的数量都是满的
- Effect:
- Effect(coin,η)=η,表示投入硬币,目标变量(nsoda和nbeer)没有改变
- Effect(retcoin,η)=η,表示退回硬币,目标变量(nsoda和nbeer)没有改变
- Effect(sget,η)=η[nsoda:=nsoda−1],表示获取一瓶苏打,nsoda的值减少一
- Effect(bget,η)=η[nbeer:=nbeer−1],表示获取一瓶啤酒,nbeer的值减少一
- Effect(refill,η)=[nsoda:=max,nbeer:=max],表示重新填满苏打和啤酒,nsoda和nbeer的值等于最大值
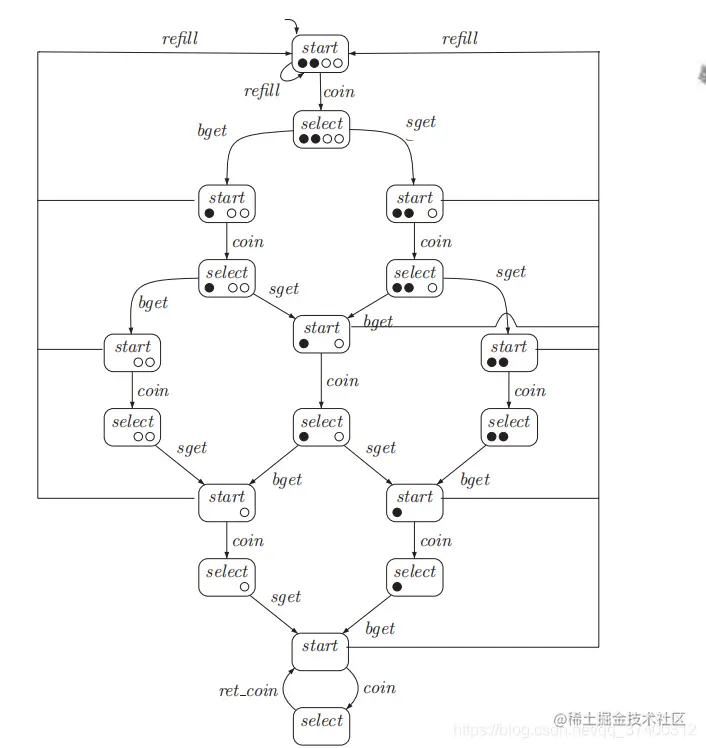
- PG图:(其中,结点内的黑色实心表示啤酒,空心表示苏打,图中初始位置只有两瓶啤酒和两瓶苏打)
- PG转换为TS的方法
- PG六元组:
PG=(Loc,Act,Effect,↪,Loc0,g0)
分别是位置、动作、影响、转移关系、初始位置、初始限定条件
- TS六元组:
TS=(S,Act,→,I,AP,L)
分别是状态、动作、转移关系、初始状态、原子命题、标签函数
- 具体转换规则如下:
- S=Loc×Eval(Var),表示,TS的状态是位置与变量取值的笛卡尔积。具体来说,新的状态包含了位置和位置上的变量取值
- Act保持不变
- →∈S×Act×S由以下规则定义:
{\ell \overset{g:\alpha }{\hookrightarrow} {\ell}'
\wedge \eta \models g}
{\langle \ell , \eta \rangle \overset{\alpha }
{\rightarrow} \langle {\ell}' , Effect(\alpha ,\eta ) \rangle }$$
表示,转移关系是在某状态对应于PG上的原位置ℓ上当前赋值η满足动作α执行条件g时,从原状态⟨l,η⟩,经动作α,到达新状态⟨l′,Effect(α,η)⟩的转移关系。
其中,ℓ′是原PG上的位置ℓ依动作α经↪转移所到达的新位置(可以和ℓ相同),而 Effect(α,η)是当前的变量赋值η经Effect表中动作α对应的影响操作后的新的变量赋值(可以和η相同)。
- $I = \{ \langle \ell , \eta \rangle \} | \ell \in Loc_{0} \cup \{ g \in Cond(Var) | \eta \models g_{0} \}$,表示初始状态是PG中的所有初始位置,和满足初始条件的所有变量赋值的笛卡尔积。
- $AP = Loc \cup Cond(Var)$,表示原子命题集合是所有的位置$Loc$和PG中出现的所有条件$Cond(Var)$的并集。
- $L = \{ \ell \} \cup \{ g \in Cond(Var)| \eta \models g \}$,表示对状态取标签得到的是位置$\ell$以及变量赋值$\eta$所满足的限定条件$g$的集合。


