1 简介
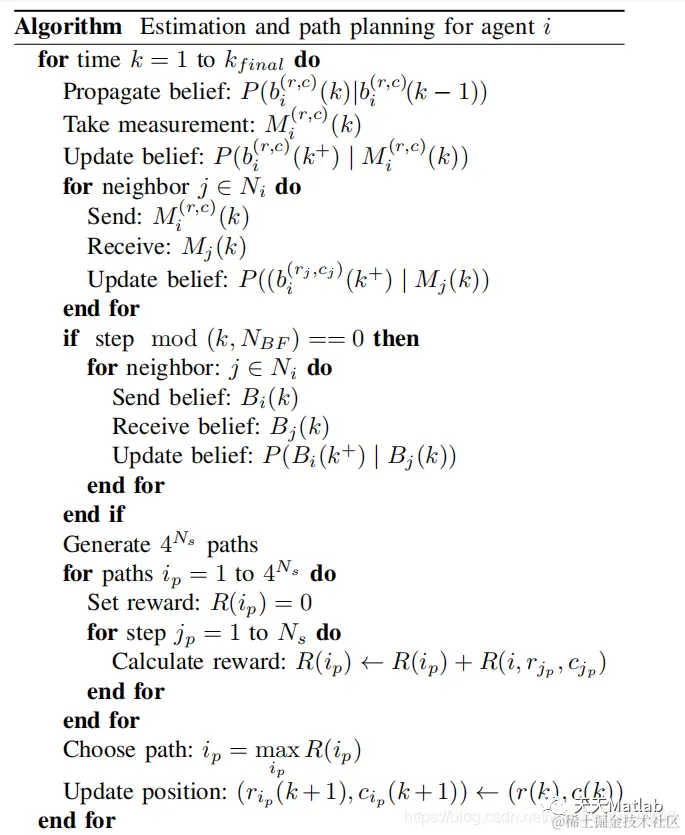
—Recent advances in technology have increased thecapability of mobile platforms while decreasing the cost. It hasbecome more feasible to deploy a team of agents to cooperativelyaccomplish an objective. While multi-agent systems provideadvantages, including lower cost and robustness to failure, thereis a need for additional study of principles for the design andtest of these decentralized systems. The main contribution of thispaper is a novel estimation and path planning algorithm thatcan be used for improved estimation of uncertain environments.The estimation algorithm utilizes Bayesian fusion, measurementsharing on a graph, and belief consensus. One new componentof this approach is the reward-based path planning algorithmthat incentivizes agents to collect the best local informationas well as improve coverage of the environment. When agentsplan paths to collect more valuable information, the estimationerror is reduced. This approach is studied for the applicationof estimating the state of a forest fifire but can be applied inmany domains. Simulations were performed to demonstrate theeffectiveness of the algorithm compared to other approaches

2 部分代码
import java.util.LinkedList
tic
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
ENV_SIZE = 20
formation = 1
rand_comm = 3
depth = 3
branch_factor = 4
num_of_agents = 5
fire_rate = 0.007
burn_out_rate = 0
duration = 1000
start_display = 0
fusion_interval = 10
cost_power = 2
% to others
UAV_range = 5
gamma = 3/10
alpha = 0.7
false_pos = 0.10
false_neg = 0.10
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% True Positive and False Positive.
true_pos = 1 - false_pos
true_neg = 1 - false_neg
% Laplacian matrix for communication between agents. (Ring formation)
L = get_laplacian(num_of_agents,formation,rand_comm)
% Estimated matrix initialized to 50% probability of fire in each location.
% (Centralized Map)
est_state = 0.5*ones(ENV_SIZE)
% Estimated matrix for each UAV within the environment.
est_state_UAVs = 0.5*ones(ENV_SIZE,ENV_SIZE,num_of_agents)
% Initialized ENV_SIZExENV_SIZE matrix as our true state environment
% (binary representation).
true_state = zeros(ENV_SIZE)
% Used to keep track of coordinates of "burned out" squares.
fire_out_x = LinkedList()
fire_out_y = LinkedList()
% Generate and place random location for the initial fire.
x = randi(ENV_SIZE)
y = randi(ENV_SIZE)
true_state(x,y) = 1
fire_out_x.add(x)
fire_out_y.add(y)
% Coordinates of randomly places UAVs.
robX = randperm(ENV_SIZE,num_of_agents)
robY = randperm(ENV_SIZE,num_of_agents)
% Pre-allocate to calculate error in our model.
total_err = zeros(duration,1)
total_err_UAVs = zeros(duration,1)
UAV_error = zeros(num_of_agents,1)
% Used to calculate "best path". Calculated beforehand to optimize
% runtime.
paths = zeros(depth,2,branch_factor^depth)
second_value = get_directions(paths,branch_factor^depth,1,0)
% Keep spreading fire and running algorithm until time duration is up.
for index = 1:duration
% Spread the fire throughout the environment based on the fire_rate.
[true_state,fire_out_x,fire_out_y] = spread_fire(true_state,ENV_SIZE,fire_out_x,fire_out_y,fire_rate)
% The fire spread is updated. Now perform step 2 and update
% est_state by using prediction model. (Centralized Map)
est_state = update_est_state(est_state,ENV_SIZE,fire_rate)
% Update the estimated mapping for each UAV.
for i = 1:size(est_state_UAVs,3)
est_state_UAVs(:,:,i) = update_est_state(est_state_UAVs(:,:,i),ENV_SIZE,fire_rate)
end
for loc = 1:size(robX,2)
% Sensor "error" chance of having incorrect information (STEP 3)
M = true_state(robX(loc),robY(loc))
if M == 1
% The true state is 1 and we have a false negative
if rand() < false_neg
M = 0
end
else
% The true state is 0 and we have a false positive
if rand() < false_pos
M = 1
end
end
% Now that we updated est_state, we want to update based on our
% "sensor readings" or measurements. (Step 3 & 4) (Centralized Map)
est_state = update_est_state_2(est_state,M,robX(loc),robY(loc), ...
false_pos,false_neg,true_pos,true_neg)
% Update estimated state for each UAV.
est_state_UAVs(:,:,loc) = update_est_state_2(est_state_UAVs(:,:,loc),M, ...
robX(loc),robY(loc),false_pos,false_neg,true_pos,true_neg)
% Update connected UAV's mapping based on current measurement.
for j = 1:size(L(:,loc),1)
if L(j,loc) == -1
% j is UAV connected to loc
est_state_UAVs(:,:,j) = update_est_state_2(est_state_UAVs(:,:,j),M, ...
robX(loc),robY(loc),false_pos,false_neg,true_pos,true_neg)
end
end
end
% Only display maps after reaching timestep "start_display".
if (index >= start_display)
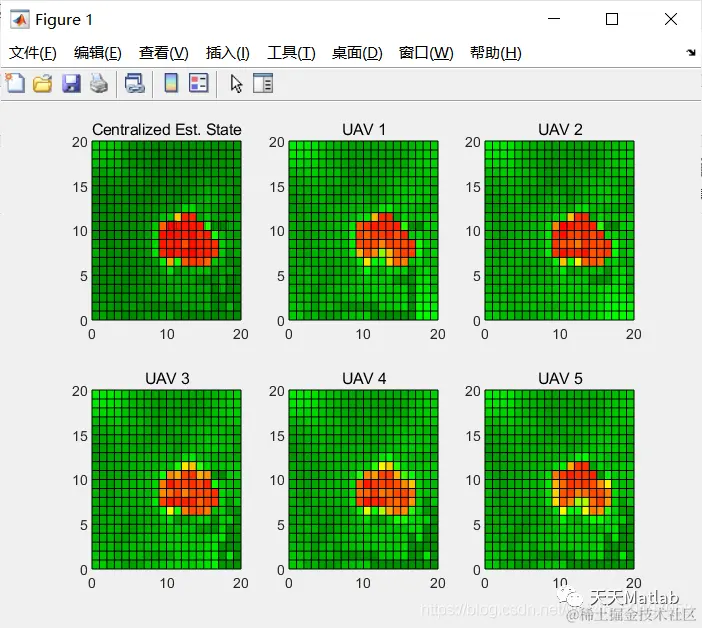
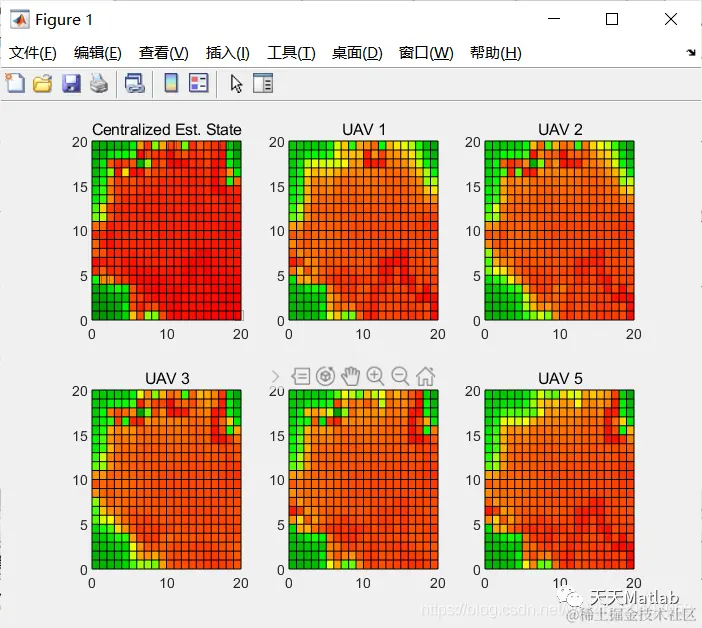
display(num_of_agents,ENV_SIZE,true_state,est_state,est_state_UAVs,robY,robX)
pause(0.02)
end
% Perform estimated mapping fusion for connected agents after specified
% simulation iterations
if (~mod(index,fusion_interval))
for agent = 1:num_of_agents
est_state_UAVs(:,:,agent) = est_map_fusion(L(agent,:),est_state_UAVs,...
est_state_UAVs(:,:,agent),gamma)
end
end

3 仿真结果