「这是我参与2022首次更文挑战的第13天,活动详情查看:2022首次更文挑战」。
@TOC

前言
Hello!小伙伴!
非常感谢您阅读海轰的文章,倘若文中有错误的地方,欢迎您指出~
自我介绍 ଘ(੭ˊᵕˋ)੭
昵称:海轰
标签:程序猿|C++选手|学生
简介:因C语言结识编程,随后转入计算机专业,有幸拿过一些国奖、省奖...已保研。目前正在学习C++/Linux/Python
学习经验:扎实基础 + 多做笔记 + 多敲代码 + 多思考 + 学好英语!
机器学习小白阶段
文章仅作为自己的学习笔记 用于知识体系建立以及复习
知其然 知其所以然!
往期文章
【机器学习|数学基础】Mathematics for Machine Learning系列之矩阵理论(1):集合与映射
【机器学习|数学基础】Mathematics for Machine Learning系列之矩阵理论(2):线性空间定义及其性质
【机器学习|数学基础】Mathematics for Machine Learning系列之矩阵理论(3):线性空间的基与坐标
【机器学习|数学基础】Mathematics for Machine Learning系列之矩阵理论(4):基变换与坐标变换
【机器学习|数学基础】Mathematics for Machine Learning系列之矩阵理论(5):线性子空间
【机器学习|数学基础】Mathematics for Machine Learning系列之矩阵理论(6):子空间的交与和
【机器学习|数学基础】Mathematics for Machine Learning系列之矩阵理论(7):欧氏空间
【机器学习|数学基础】Mathematics for Machine Learning系列之矩阵理论(8):标准正交基与Gram-Schmidt过程
【机器学习|数学基础】Mathematics for Machine Learning系列之矩阵理论(9):正交补与投影定理
【机器学习|数学基础】Mathematics for Machine Learning系列之矩阵理论(10):线性变换定义
【机器学习|数学基础】Mathematics for Machine Learning系列之矩阵理论(11):线性变换的矩阵表示
【机器学习|数学基础】Mathematics for Machine Learning系列之矩阵理论(12):相似形理论
【机器学习|数学基础】Mathematics for Machine Learning系列之矩阵理论(13):Hamliton-Cayley定理、最小多项式
【机器学习|数学基础】Mathematics for Machine Learning系列之矩阵理论(14):向量范数及其性质
4.2 矩阵的范数
4.2.1 矩阵范数的定义与性质
定义4.3:矩阵范数
设A、B∈Cn×n,a∈C,按某一法则在Cn×n上定义一个A的实值函数,记为∣∣A∣∣
其满足下面四个条件
- 非负性:如果A=0,则∣∣A∣∣>0;若A=0,则∣∣A∣∣=0
- 齐次性:对任意的a∈C,∣∣aA∣∣=∣a∣∣∣A∣∣
- 三角不等式:∣∣A+B∣∣≤∣∣A∣∣+∣∣B∣∣
- 相容性:∣∣AB∣∣≤∣∣A∣∣⋅∣∣B∣∣
则称∣∣A∣∣为矩阵范数或乘积范数
m1范数
定义A∈Cn×n,A=(aij)n×n,则
∣∣A∣∣m1=∑i,jn∣aij∣
为m1范数
m∞范数
定义A∈Cn×n,A=(aij)n×n,则
∣∣A∣∣m∞=n⋅maxi,j∣aij∣
为m∞范数
F−范数(或m2范数)
定义A∈Cn×n,A=(aij)n×n,则
∣∣A∣∣F=(∑i=1n∑j=1n∣aij∣2)21=tr(ATˉA)21
为F−范数(或m2范数)
定义4.4
如果任意向量χ∈Cn及任意n级方阵A∈Cn×n,对于给定的向量范数∣∣χ∣∣和矩阵范数∣∣A∣∣满足不等式
∣∣Aχ∣∣≤∣∣A∣∣∣∣χ∣∣
则称矩阵范数∣∣A∣∣与向量范数∣∣χ∣∣相容
酉矩阵
定义
若矩阵A满足AHA=AAH=E,则称A为酉矩阵
AH是指:共轭转置,不仅需要进行转置,还需要对虚数进行取反
性质
(1)∣detA∣=1:A的行列式的模长为1
(2)A−1=AH
(3)对任意向量x,有∣∣Ax∣∣2=∣∣x∣∣2,即2-范数的酉不变性
(4)A是酉矩阵当且仅当A的行(列)向量组是两两正交的单位向量
定理4.2.1
设A∈Cn×n,P,Q∈Cn×n,P,Q皆为酉矩阵,则
∣∣PA∣∣F=∣∣A∣∣F=∣∣AQ∣∣F
A是n级实方阵时,P、Q都是正交矩阵
说明:正交变换、酉变换对矩阵F-范数具有保范性
定理4.2.2
方阵A∈Cn×n的任一种范数是A的元素的连续函数
定理4.2.3
对于Cn×n中任意两种方阵范数∣∣A∣∣a和∣∣A∣∣b,必然存在k2≥k1>0,使得
k1∣∣A∣∣b≤∣∣A∣∣a≤k2∣∣A∣∣b
对于Cn×n中一切方阵A都成立
4.2.2 几种常用的矩阵范数
定义4.5:算子范数
设∣∣χ∣∣a是Cn的一个向量范数,对于任何A∈Cn×n,则
∣∣A∣∣a=max∣∣χ∣∣a=1∣∣aχ∣∣a
是一个与∣∣χ∣∣相容的方阵范数,称这个方阵范数为从属于向量范数∣∣χ∣∣a的算子范数
定理4.2.4
设A∈Cn×n,χ∈Cn,χ=(ξ1,ξ2,...,ξn)T,则从属于向量χ的三种范数∣∣χ∣∣1,∣∣χ∣∣2,∣∣χ∣∣∞的矩阵算子范数分别是
||A||_1=\max_j\sum_{i=1}^{n}|a_{ij}|\tag{1}
记忆:先对A中对每一列元素取模再求和,然后找出各列模总和中最大的一个值
||A||_2=\sqrt{\lambda_1},\quad \lambda_1为A^HA的最大特征值\tag{2}
记忆:先找出AHA中的最大特征值 再开方
||A||_{\infty}=\max_i\sum_{j=1}^{n}|a_{ij}|\tag{3}
记忆:先对A中对每一行元素取模再求和,然后找出各行模总和中最大的一个值
定义4.6
若n×n矩阵A的全部特征值为λ1,λ2,...,λn,则称
ρ(A)=maxi∣λi∣
为方阵A的谱半径
其实就是方阵A的∣∣A∣∣2范数
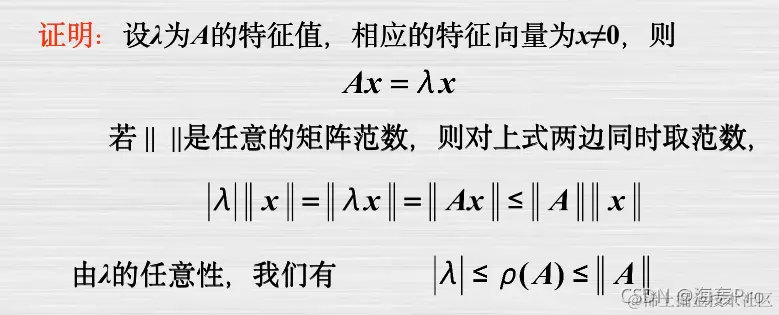
补充
如果∣∣⋅∣∣是任意的矩阵函数,且A∈Cn×n,则
ρ(A)≤∣∣A∣∣
定理4.2.6
设A∈Cn×n,则
(1)∣∣A∣∣2=∣∣AH∣∣2=∣∣AT∣∣2=∣∣Aˉ∣∣2
(2)∣∣AHA∣∣2=∣∣AAH∣∣2=∣∣A∣∣22
(3)对任何n阶酉阵U及V,都有
∣∣UA∣∣2=∣∣AV∣∣2=∣∣UAV∣∣2=∣∣A∣∣2
结语
说明:
- 参考于 课本《矩阵理论》
- 配合书中概念讲解 结合了自己的一些理解及思考
文章仅作为学习笔记,记录从0到1的一个过程
希望对您有一点点帮助,如有错误欢迎小伙伴指正