直线加速器物理-Part1
1. 高频直线加速器简介
射频直线加速器(Radio Frequency Linear Accelerator, RF Linac)是指按照直线轨道利用时变电磁场将带电粒子加速到更高能量的装置。
2. 束流和束团的概念,电子和质子加速器的主要区别,行波和驻波加速
束流和束团的概念
- 通常加速器所加速的带电粒子不是一个两个,而是对极大数量的粒子进行加速,这些粒子在电磁场的作用下,大体沿某一特定方向运动,形成带电粒子流,称之为束流。
- 在加速过程中,由于时变电磁场的作用,形成一个个束流脉冲,即束团。
电子和质子加速器的主要区别
- 电子加速器:电子静止质量很小,很容易被加速到接近光速,即β≈1,因此以高频为基础的加速结构不需要考虑其速度变化带来的同步问题,环形加速器需要考虑同步辐射因素。
- 质子加速器:与电子不同,质子静止能量大,只有高能加速器才能把粒子速度提高到接近光速,一般情况下无同步辐射问题。低能时,经常可以不考虑相对论效应,而在中能时通常也只需要做相对论的校正就可以了。高频加速结构需要考虑速度的变化。
行波和驻波加速
- 行波:加速结构是波导,RF电场沿传播方向建立;
- 驻波:加速结构式谐振腔,RF电场在束流进入前已建立。
3. 高频直线加速器加速场的特点,加速过程中的同步问题,相速,群速,弗洛克定理,色散曲线,通带和禁带
高频直线加速器加速场的特点
- 束流的注入和引出系统相对简单
- 粒子的加速能量可以从较低能量(KeV)到恨到能量(GeV、TeV)
- 可以提供高流强的束流,易于对束流进行横向聚焦和纵向聚束,提供高品质的束流
- 可提供占空比可调的脉冲束流
- 能够逐段进行设计、安装和调整
- 射频加速器设备的稳定性和可靠性是运行的重要问题
- 单位束流功率的制造安装和运行费用昂贵
加速过程中的同步问题
相速
vp=k1+k2ω1+ω2⟶kω
群速
vg=k1−k2ω1−ω2⟶dkdω
弗洛克定理
- 对于某种给定的传播模式,无限长周期性结构中任一位置上的电场,在经过一个结构周期之后,只增加一个复数因子。
色散曲线
- 色散关系:(cω)2−kp2=(cωc)2
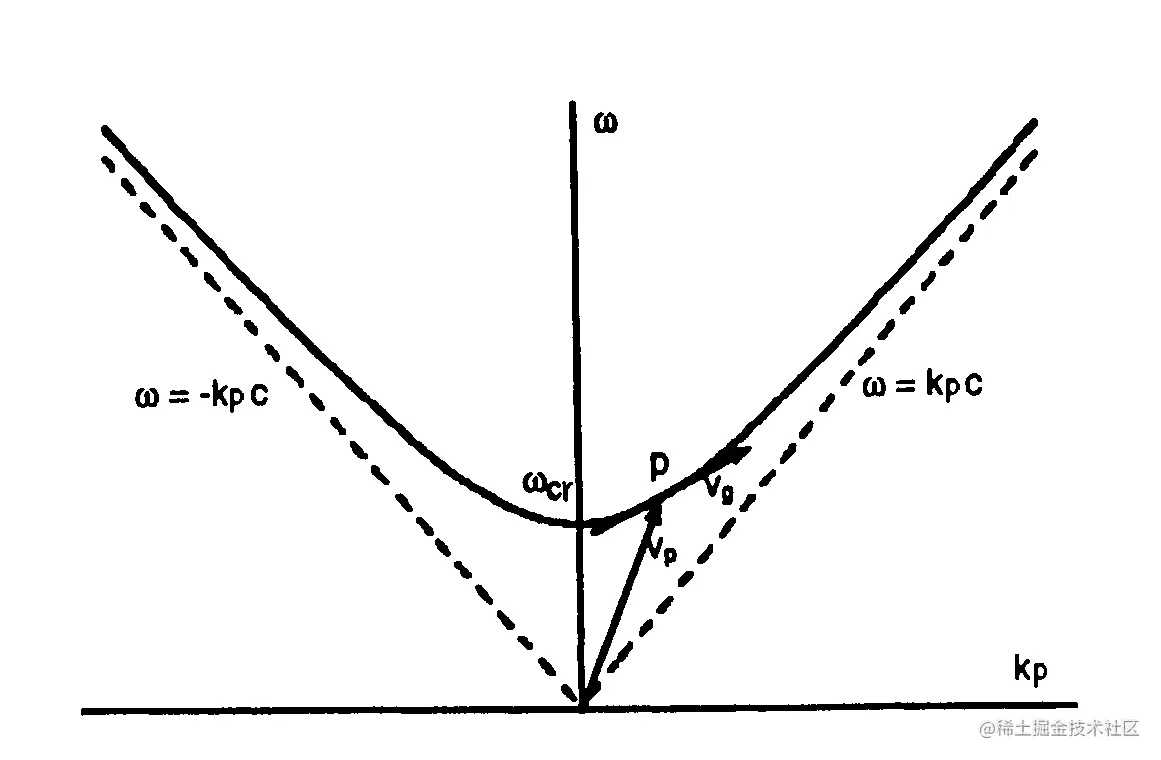
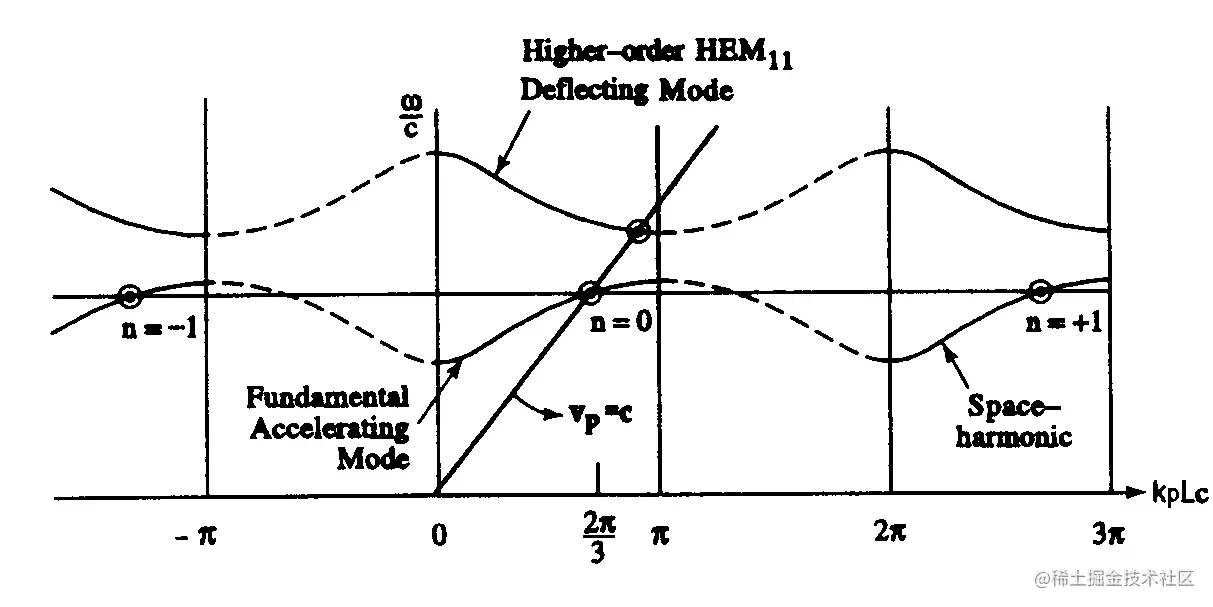
通带和禁带
- 引进周期性结构后,由于波在其间的反射叠加,原来的传播特性曲线分裂成一系列的通带(kpn为实数)和禁带(kpn为虚数)(其中kc2=(cω)2−kpn2)。
直线加速器物理-Part2
1. 加速结构的基本参数,包括分路阻抗、品质因数、Zs/Q、群速、衰减常数、工作频率、工作模式
分路阻抗
分路阻抗表示在给定高频功率损耗下,加速腔中能建立起多高的加速电场。
zs=PwE02单位:MΩ/m
其中,E0为轴上最大电场,即基波电场纵向分量的振幅;Pw为单位长度在加速管上的功率损耗。
分路阻抗与电场幅度无关,仅取决于结构的几何形状、尺寸、材料性能以及工作模式的选择。
品质因数
定义加速腔的无负载品质因数为:
Q=PwωU单位:无量纲
其中,U是加速腔单位长度的储能。在给定腔的储能后,品质因数越高,功率损耗越小;或者在给定高频损耗后,品质因数越高,腔中储能越高,电压越高。
品质因数与腔中被激励的电场模式有关,各模式有各自的Q值。若选用的模式的Q值越高,这个模式的场就越强;但在某些微扰作用下,这个场的畸变也就越灵敏。例如结构中因频率误差而导致的场的相移为△ϕ=Qf△f,Q值越高,相移△ϕ越大,因此对△ϕ要求严格的腔,宁可Q值低些。
zs/Q
zs/Q表示要建立一定的电场E0,所需要的最小储能U是多少,和功率的损耗无关,与材料、工艺等无关。
群速
vg=UP=dkdω
其中,U是加速腔单位长度的储能,P是功率流。
衰减常数
dzdP=−Pw=−QωU=−QvgωP=−2α0P
其中定义单位长度的场衰减常数α0=2Qvgω,定义功率衰减常数τ=∫0Lcavα0(z)dz.对于结构均匀的等阻抗加速结构,α0为常数,τ0=α0Lcav
工作频率
- 分路阻抗
zs∼f01/2
- 品质因数
Q∼f0−1/2
- 功率损耗
Pw∼f0−1/2
- 建场所需最小储能
zs/Q∼f0
- 高频储能
U∼f0−2
- 功率填充时间
tf∼f0−3/2(tf=Lc/vg)
- 结构的横向尺寸
a,b∼f0−1
- 纵向尾场
∼f02
- 横向尾场
∼f03
工作模式
指相邻加速单元(cell)之间的高频相移,如0,π/2,2π/3,π模式。
对于盘荷波导加速结构,2π/3模具有最大的分路阻抗。
腔长(光速):
Lc=λfor0−modeLc=λ/4forπ/2−modeLc=λ/3for2π/3−modeLc=λ/2forλ/2−mode
2. 等阻抗加速结构和等梯度加速结构,包括二者各自的特点、场和功率沿纵向的分布情况
等阻抗加速结构
对于由相同加速单元组成的行波加速结构,由于每个单元的几何参数都一样,因此Q,vg,zs,α0都相同,被称为等阻抗加速结构。
P(z)=Pine−2α0zE0(z)=E0(0)e−α0z
高频功率和电场沿传播方向指数衰减。“骑”在加速电场峰上的电子,经过加速结构后的能量增益为:
△W=q∫0LcavE0(0)dz=qE0(0)Lcavτ01−e−τ0=q2zsLcavPinτ01−e−τ0
为了获得最大的能量增益,在优化加速结构时应使得:
- zs最大
- (τ01−e−τ0)max→τ0=1.26
但另一方面,tf=vgLcav=ω2Qτ0,为了缩短建场时间,需要折衷考虑,因此一般τ0<1.26,通常τ0=0.5∼0.8
等梯度加速结构
等梯度加速结构通过调整各加速腔的横向几何尺寸a和b,使得加速电场始终保持恒定。(等梯度指的是电压梯度)
E0(z)=const⇒dzdP=const⇒α0(z)=constP1dzdP=−2α0积分得:Pout=P(Lacc)=Pine−2τ0
在加速结构的末端:
P(z)=Pin+LcavPout−Pinz=Pin[1−Lcav1−e−2τ0z]
在等梯度加速结构中,功率是沿纵向线性减小的:
α0(z)=−2P(z)dzdP(z)=2Lcav1⋅1−Lcav1−e−2τ0z1−e−2τ0
在等梯度加速结构中,群速也是沿z方向线性减小的:
vg=QωLcav⋅1−Lcav1−e−2τ0z1−e−2τ0
为了获取最大的能量增益,需要zs和τ0最大:
△W=qzsPinLcav(1−e−2τ0)
等梯度加速结构的建场时间与等阻抗加速结构的一样:
tf=∫0Lcavvgdz=ωLcavQ(1−e−2τ0)∫0Lcav1−Lcav1−e−2τ0zdz=ω2Qτ0
τ0增大时,虽然能量增益增大,但建场时间也相应增加,因此τ0的选择,两方面因素都需要考虑。
3. 电子枪简介,电子直线加速器预注入器,聚束系统原理,能量增益,渡越时间因子
电子枪简介
- 电子枪基本原理一般都是加热阴极,使其发射电子,然后电子在极间高压的作用下加速,通过阳极上的小孔射出。现在一般比较常用的常规电子枪是栅控电子枪。在离阴极很近的地方安装一个栅极,改变栅极调制电压可以很方便的调节枪电流,从而获取陡峭的电流脉冲。
电子直线加速器预注入器
- 电子直线加速腔在开始部分都有一段注入器作为整个直线加速器的起始,预注入器虽然因机器的不同而有所不同,但结构和功能都基本相同,通常由电子枪和聚束系统组成。
聚束系统原理
- 从电子枪出来的电子速度(v<c)。首先经过高频腔或波导的高频场,对束团中的电子进行速度调制,再经过一段漂移节后,束团的纵向长度可以得到压缩。束团前后电子由于所处高频相位不同,受力情况也有所不同。前面的电子受到减速作用,速度减小,能量降低;后面的电子受到加速作用,速度提高,能量增加。在经过一段漂移节后,后面速度很快的电子赶上前面速度慢的电子,从而实现纵向聚束。聚束可以把大多数电子聚集在大约10°高频相位范围内。
- 能量增益
△W=qE0TLbcosϕ
- 渡越时间因子
T=∫−Lb/2Lb/2E(0,z)dz∫−Lb/2Lb/2E(0,z)cosωt(z)dz
直线加速器物理-Part3
1. 高频功率源和脉冲压缩器,同步加速相位,自动稳相原理
高频功率源和脉冲压缩器
- 高能直线加速器的高频功率源由速调管和高压调制器两部分组成。为增加峰值功率以提高加速梯度,一些直线加速器采用了脉冲压缩器。高频脉冲压缩器的作用是把低功率的长脉冲,压缩为高功率的短脉冲。
同步加速相位
- 在行波直线加速器中,要求电子的速度与加速场的相位同步,即v(z)=vp(z),也可以用另外一种表述方式。
- 盘荷波导工作与π/2模时,要求电子渡越一个单元的距离(LC)时,加速电场变化了1/4个周期(90°),即同步加速条件为:kpLc=vpω=λ2πcvp1Lc=2πβλLc=2π⇒Lc=41βλ
自动稳相原理
2. 纵向运动方程,相稳定区,刘维定理,小振幅相振荡
纵向运动方程
- 经过一个加速单元后,同步粒子和非同步粒子的能量增益分别为:
δWs=qE0TLccosϕsδW=qE0TLccosϕ
其中T是渡越时间因子(对于行波加速结构T=1,驻波加速结构T<1)
于是有:
dzd△W=qE0T(cosϕ−cosϕs)
其中△W=m0c2γs3βs△β,△β=β−βs另外:△ϕ=ϕ−ϕs=ω(t−ts)
dzd△ϕ=ω(dzdt−dzdts)=ω(v1−vs1)=cω(β1−βs1)≈−λβs22π△β
可以得到:
△β=−2πβs2λdzd△ϕ
将其带入方程△W=m0c2γs3βs△β,可以得到:
△W=−2πλm0c2βs3γs3dzd△ϕ
对两边进行求导,可以得到:
dz2d2△ϕ+βsγs3dzd(βsγs)dzd△ϕ+m0c2βs3γs3λ2πqE0T(cosϕ−cosϕs)=0
这是关于△ϕ二阶微分方程,描述了在(△ϕ,△W)相空间非同步粒子相对于同步粒子的运动情况。
相稳定区
假设加速梯度够小,可以忽略阻尼项dzd(βsγs
纵向运动方程可以简化为:
dz2d2△ϕ+m0c2βs3γs3λ2πqE0T(cosϕ−cosϕs)=0
将二阶导分开写:
d(dzd△ϕ)=−m0c2βs3γs3λ2πqE0T(cosϕ−cosϕs)dz
两边同时乘以d△ϕ,可以得到:
dzd△ϕd(dzd△ϕ)=−m0c2βs3γs3λ2πqE0T(cosϕ−cosϕs)d△ϕ
对方程两侧进行积分,并利用dzd△ϕ=−βs3γs3λ2πm0c2△W,可以得到:
21βs3γs3λ2π(m0c2△W)2+m0c2qE0T(sinϕ−ϕcosϕs)=C
用c1=βs3γs3λ2π,c2=m0c2qE0T,wk=△γ=m0c2△W代替到上面公式中,可以得到:
2c1wk2+c2(sinϕ−ϕcosϕs)=Hϕ
方程左侧的第一项是“动能”项;第二项是“势能”项;Hϕ是积分常数项,也就是哈密顿量。方程反映的是运动能量的守恒。
刘维定理
能够使用哈密顿量描述的运动系统,相轨迹包围的面积为常数。
当同步相位ϕs在(−π/2,0)之间时,存在势阱,势阱中的粒子围绕同步粒子(ϕs,Ws)做振荡,能够被稳定的加速。
稳定区的范围是ϕ2<ϕ<−ϕs,其中ϕs是Hϕ(ϕ2)=Hϕ(−ϕs)的解。
对于小角度振荡,ϕ2≈2ϕs,稳定区的宽度约为3∣ϕs∣。因此有∣ϕs∣↑稳定区增大,但是能量增益dzdW↓
相稳定区的边界称为Separatrix、fish或者bucket。Hϕ可以取ϕ=−ϕs和wk=0用下面的方程求得:
Hϕ=c2[sin(−ϕs)−(−ϕs)cosϕs]
取ϕ=ϕs,并利用上式,可以求得相稳定取的能量范围:
wmax=m0c2△Wmax=πm0c22qE0Tβs3γs3λ(ϕscosϕs−sinϕs)
纵向加速方程公式,前面的分析中忽略了阻尼项dzd(βsγs)。当考虑阻尼项后,相轨迹有所变化,但面积仍然保持恒定。
对于低速粒子的加速,当经过加速后,同步粒子的速度和能量有较大变化,以至于不能忽略时,相稳定区将有所增大,因而加速器的接受范围有所增加,相稳定区域的边界也由原来的“鱼形”变成“螺旋线形”。
小振幅相振荡
当相振荡范围较小时,考虑对ϕs展开:
cosϕ≈cosϕs−(ϕ−ϕs)sinϕs−2(ϕ−ϕs)2cosϕs
在纵向运动方程中只保留线性项,得到:
dz2d2(△ϕ)+kl2(△ϕ)=0
其中kl2=∣m0c2βs3γs3λ2πqE0Tsinϕs∣是相振荡的波数。
相振荡周期长度为:
Ll=kl2π≥10λ
相振荡频率有:
fl≤10%frf
考虑小幅相振荡:
sinϕ−ϕcosϕs≈sinϕs−ϕscosϕs−2(ϕ−ϕs)2sinϕs
带入到2c1wk2+c2(sinϕ−ϕcosϕs)=Hϕ得到:
c1wk2+c2sin(−ϕs)(ϕ−ϕs)2=2(Hϕ+c2ϕscosϕs−c2sinϕs)≡H
可以写成:
w02wk2+△ϕ02(ϕ−ϕs)2=1
此方程为相椭圆方程,其中△ϕ0=ϕmax−ϕs,\ w0=m0c2△W0=qE0Tβs3γs3λsin(−ϕs)△ϕ02/2πm0c2
如果加速梯度较小,根据刘维定理,相椭圆面积保持不变,为:
area=π△ϕ0w0=π△ϕ022πm0c2qe0Tβs3γs3λsin(−ϕs)
可以得到,对于小幅度振荡,粒子相位和能量振幅随加速过程有下面规律:
△ϕ0∝(βsγs)−3/4⇒△W0∝(βsγs)3/4
当β→1时,相振荡消失。
3. 加速场的横向分量及其对束流的影响,螺线管磁铁、偏转磁铁、四极磁铁简介
加速场的横向分量及其对束流的影响
由于在直线加速器中,束流沿轴线方向加速,束流始终靠近中心位置,因此主要关心的是近轴条件(r≪R)下的高频场分布。
Ez
在柱坐标下,波动方程为:
▽2E(r)+k2E(r)=0▽2H(r)+k2H(r)=0
考虑到TM01和TM010模的轴对称性,有(H同理):
∂θ∂E=0∂θ2∂2E=0
因此有:
r1∂r∂(r∂r∂Ez)+∂z2∂2Ez+k2Ez=0
把方程左侧的第二第三项移到右侧,并对r积分,得到:
∂r∂Ez=−r1∫r(∂Ez∂2Ez+k2Ez)dr
假设加速结构的半径为R,在近轴条件下,r≪R,把轴向电场对r展开:
Ez(r,z,t)=Ez(0,z,t)+2r2⋅∂r2∂2Ez∣r=0+⋯∂r∂Ez∣r=0=0
把上式带入到∂r∂Ez=−r1∫r(∂Ez∂2Ez+k2Ez)dr,忽略r3以上的高阶项,得到:
∂r∂Ez=−2r⋅(∂z2∂2Ez+k2Ez)∣r=0和∂r2∂2Ez=−21(∂z2∂2Ez+k2Ez)∣r=0
解得:
Ez(r,z,t)≈Ez(0,z,t)−4r2⋅(∂z2∂2Ez+k2Ez)∣r=0
对于驻波加速结构,可以把时间t与r,z坐标分离:
Ez(0,z,t)=Ez(0,z)cos(ωt+ϕ0)
其中ϕ0是t=0时刻的相位。
假设加速结构为周期性,周期长度为Lc,根据Flouquet定理,可以把场分布写成周期函数的形式:
Ez(0,z)=−∞∑∞Ancos(Lc2πnz)
将其带入,可以得到:
Ez(0,z,t)=−∞∑∞Bncos(ωt−Lc2πnz+ϕ0)
上式表示Ez场由一系列波数和相速各不相同的空间谐波分量组成,波数和相速分别为:
kn=Lc2πnvpn=knω
取出谐波数n=1的空间谐波,相速vp1与粒子速度相同:
Ez(0,z,t)=B1cos(ωt−Lc2πz+ϕ0)
对于0模、基波加速的情况,相速vp1与粒子速度v同步,忽略在一个周期中粒子速度的变化,有:
vp1=2π/Lcω=λcLc=v⇒Lc=βλ
上式就是0的驻波加速条件。
从谐波数n=1的电场公式可以得到:
∂z2∂2Ez(0,z,t)=−(βλ2π)2Ez(0,z,t)
将其带入到Ez(r,z,t)的公式中,并考虑到k2=(cω)2=(λ2π)2:
Ez(r,z,t)=Ez(0,z,t)−4r2[(∂z2∂2Ez)r=0+(k2Ez)r=0]⇒Ez(r,z,t)≈Ez(0,z,t)[1+(βγλπr)2]
从上式可知,为减小束流能散,应使 r↓,λ↑,βγ↑
Er
通过类似的推导过程,可以得到:
Er(r,z,t)=−rβλπEz(0,z)sin(ωt+ϕ0)
从上式可知,Er与r成线性关系,与βλ成反比关系。
Hθ
同样可以得到:
Hθ(r,z,t)=−rλπcϵ0Ez(0,z)sin(ωt+ϕ0)
可知Hθ和Er对粒子分别提供了 横向作用力,二者之间的比例为:
qEr−qμ0vzHθ=−β2ϵ0μ01=c
由于磁场和电场所提供作用力方向相反,因此总的横向作用力为:
Fr=qEr−qμ0vzHθ=−(1−β2)rβλqπEz(0,z)sin(ωt+ϕ0)
显然当β→1时,Fr→0
对于同步粒子,选择:
ωt−kpz+ϕ0=ϕs−2π≤ϕs<0
可以有稳定的纵向运动。
可以发现:对于q>0,有Ez(0,z)sin(ωt+ϕz)<0。β<1,Fr>0时,粒子受到横向散焦力的作用,当β→1,Fr→0时,粒子受到的横向散焦力才会趋于0,因此要在直线加速器中引入聚焦力才能维持粒子的横向运动的稳定性,例如安装螺线管磁铁或四极磁铁来提供横向的聚焦力。
螺线管磁铁

偏转磁铁
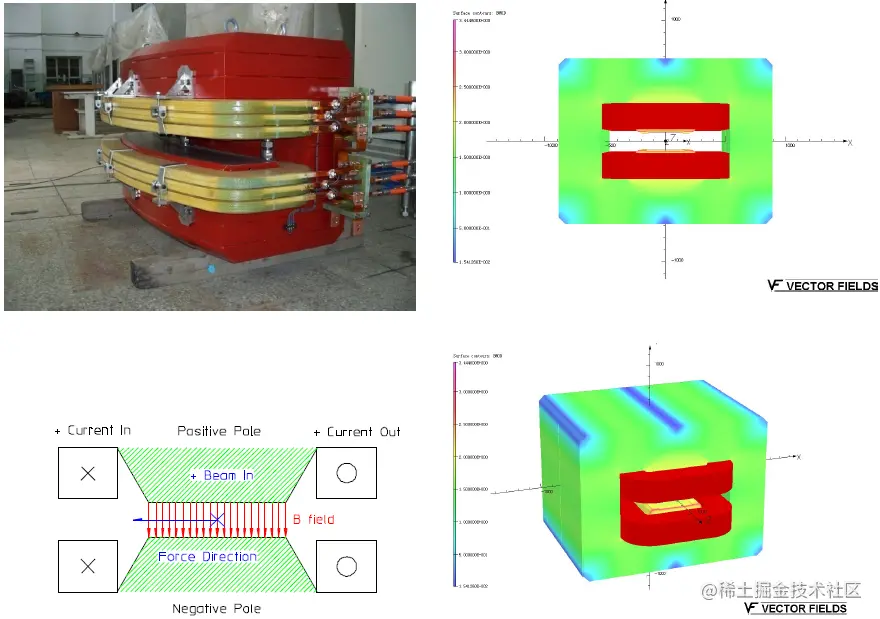
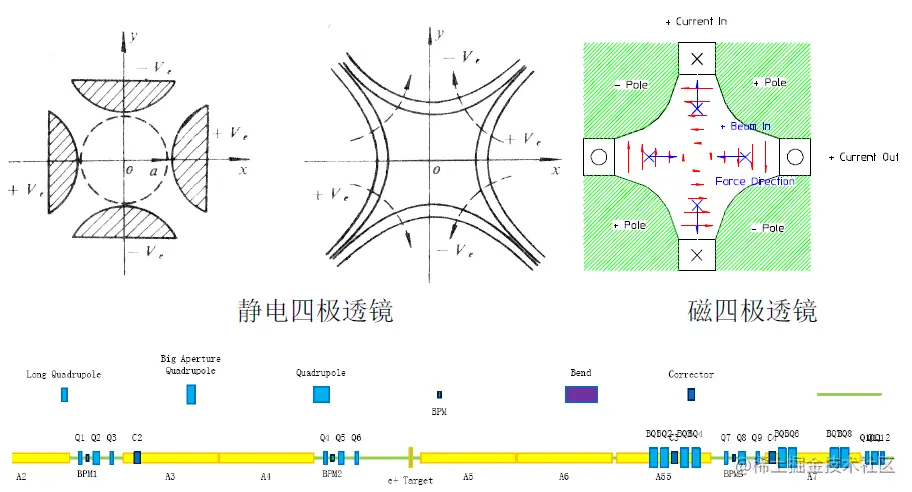
四极磁铁简介
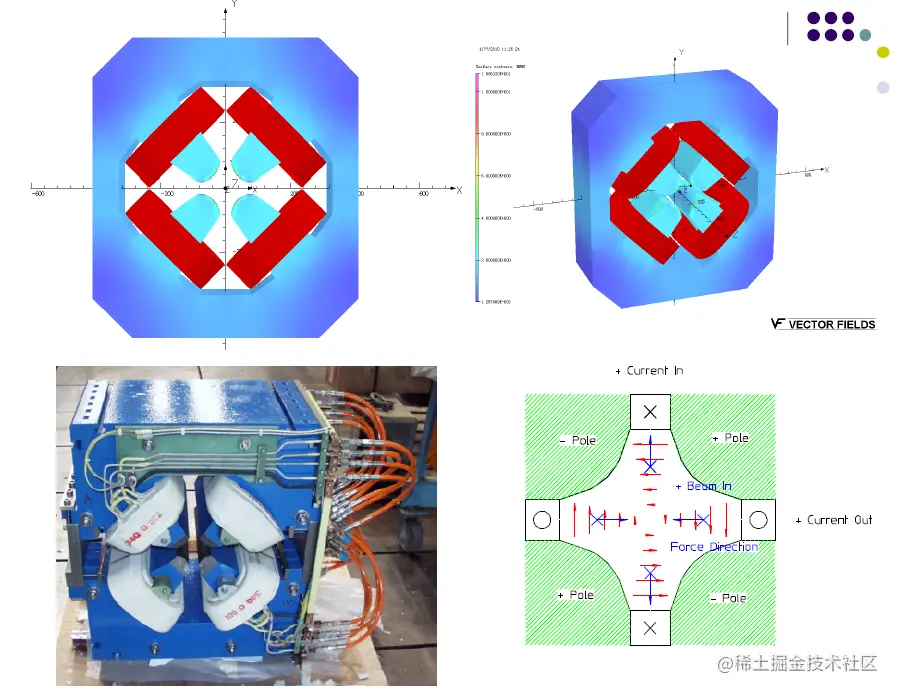 四极透镜分为静电四极透镜和磁四极透镜两大类,在高能情况下,多采用磁四极透镜。四极透镜在使用上一般是多个透镜搭配使用,如三合一四极透镜组。
四极透镜分为静电四极透镜和磁四极透镜两大类,在高能情况下,多采用磁四极透镜。四极透镜在使用上一般是多个透镜搭配使用,如三合一四极透镜组。
直线加速器物理-Part4
1. 四极磁铁的磁场,横向运动方程及其矩阵解,传输矩阵,行波加速管的传输矩阵
四极磁铁的磁场
当粒子偏离中心通过四极磁铁时,会受到横向作用力(洛伦兹力)。理想的四极磁铁的极头是双曲线型,可以提供等梯度的横向磁力:
g=∂y∂Bx=∂x∂By
假设极头相对磁铁中心的半径为r0,极头处的磁场为B0,则磁场梯度为:
g=r0B0
对于纵向运动速度为v,横向位置为(x,y)的运动粒子,受到的洛伦兹力为:
Fx=−qvgxFy=qvgy
水平和垂直方向受力符号相反,决定了两个方向不能同时聚焦或散焦。通常所称的聚焦磁铁或散焦磁铁均是以水平方向的作用来决定的。
横向运动方程及其矩阵解
x′=dzdx=pzpx⇒px=pzx′
Fx=dtdpx=dzdpxdtdz=vzdzdpx=vzdzd(pzx′)=vz(pzx′′+pz′x′)
横向运动方程:
pzx′′+pz′x′=vzFx
如果没有加速,dzdpz=0pzx′′=vFx
对于四极磁铁,Fx=−qvzBy=−qvzgxFy=qvzBx=qvzgy
可以推导出:x′′=pzvzFx=−pzqgx≈−Bρgx
磁刚度:
Bρ=qmv≈qmvz
定义四级磁铁聚焦强度:
K≡Bρg=mvq∂x∂By=γm0βcq∂x∂By单位:m−2
因此横向运动方程可以写成:x′′+Kx=0y′′−Ky=0
粒子在四极磁铁中的横向运动方程称作Mathier-Hill方程。
令k2(z)=∣K(z)∣=m0cβγ∣qg(z)∣=∣Bρg(z)∣,横向运动方程可以写成:
dz2d2x+hk2(z)x=0dz2d2y−hk2(z)y=0h=±1,0
虽然四级磁铁只在一个方向聚焦,另一个方向散焦,但是通过聚焦和散焦磁铁的交错排列(交变梯度聚焦),可以最终做到对两个方向的聚焦(强聚焦原理)。这种磁铁的排列组合,通常被称作Lattice(磁聚焦结构)。
传输矩阵
Hill方程的矩阵解
把粒子在四极磁铁和漂移节中的运动方程写成统一的形式:
x′′+K(z)x=0x′′=dz2d2x∣K(z)∣=k2(z)
- 当K=0时,表示四级磁铁强度为0,即粒子在漂移节中运动;
- 当K>0时,表示聚焦作用;
- 当K<0时,表示散焦作用;
K为常数时,上面二阶微分方程的解可以写成矩阵形式:
[xx′]=[R11R21R12R22][x0x0′]
其中x(z)=x0cos(kz)+x0′ksin(kz)x′(z)=−x0ksin(kz)+x0′cos(kz),因此R11=cos(kz),R12=ksin(kz),R21=−ksin(kz),R22=cos(kz)
M=[R11R21R12R22]
行波加速管的传输矩阵
- 漂移节(K=0)
M=[10L1]
其中L为漂移节的长度。
2. 聚焦四极磁铁
M=[cos(KL)−Ksin(KL)Ksin(KL)cos(KL)]
其中K=m0cβγqG(z)>0,L为磁铁长度。
3. 散焦四极磁铁
M=[cosh(−KL)−−Ksin(−KL)−Ksin(−KL)cos(−KL)]
其中K=m0cβγqG(z)<0,L为磁铁长度。
4. 薄透镜近似
当kL→0时,四级磁铁传输矩阵可以简化为
M=[1±f101]
其中,f1=∣K∣L=∣m0cβγqgL∣。正号表示散焦作用,负号表示聚焦作用。
由一系列元件组成的Lattice的总传输矩阵可以通过对各个元件单独的传输矩阵相乘获得:
M=MnMn−1⋯M3M2M1
在保持能量不变的情况下:∣M∣=1
4. 行波加速管
M=[10L△EcosϕE0ln(1+E0△Ecosϕ)E0+△EcosϕE0]
其中,L为加速管长度;E0是加速管入口的粒子能量;△E是整个加速管的能量增益;ϕ是粒子相对于加速场波峰的相角;λ是加速场波长。∣M∣=1
2. FODO结构,周期结构的稳定条件,束流相空间,刘维定理,发射度,归一化发射度,束流相椭圆
FODO结构
聚焦磁铁、直线节、散焦磁铁、直线节、聚焦磁铁……交错排列。周期性FODO聚焦结构的磁铁聚焦强度大小相同(可共用一套电源),聚焦和散焦交错,直线节长度相同。
Mf=[1−f101]MD=[1f101]ML=[10L1]
传输矩阵:
M=MLMDMLMf=[1−fL−f2L2−f2L2L+fL21+fL]
周期结构的稳定条件
假设一个周期的传输矩阵为M。经过n个周期的传输后,粒子的坐标变为:
[xx′]end=Mn[xx′]in
设V1和V2是M的本征向量,λ1和λ2为相应的本征值,则;
[xx′]in=AV1+BV2Mn[xx′]in=Aλ1nV1+Bλ2nV2
经过多个周期的粒子坐标应为有限值,因此λ1n和λ2n应为有限值。
根据∣M∣=1,可以得到λ2=1/λ1
本征值可以写为:
λ1=e±iμ其中μ为复数
设M=[acbd],由本征方程det(M−λ1=0),可以得到:
{(ad−bc)−(a+d)λ+λ2=0ad−bc=detM=1⇒{λ−1+λ=a+b=TrMeiμ+r−iμ=2cosμ=TrM
可得到周期结构的稳定条件为μ为实数,即:−1≤21TrM≤1
周期性FODO结构的稳定条件
一个周期的传输矩阵:
M=MLMDMLMf=[1−fL−f2L2−f2L2L+fL21+fL]
−1≤21TrM=1−21(fL)2≤1⇒∣2fL∣≤1
即稳定条件为聚焦长度大于磁铁间距的一半。
束流相空间
粒子在电磁场中的动力学行为,可用广义坐标位置和广义动量所组成的正则变量来描述,而且它们的变化规律由哈密顿正则方程所支配。
电磁场中粒子所受洛伦兹力:
F=q(E+r×B)=q[▽V−∂t∂A+r×▽×A]
哈密顿函数的物理含义为粒子的动能和势能之和,其非相对论形式为:
H(r,P,t)=2m1(P−qA)2+qVP=p+qA为广义动量
相对论形式为:
H(r,P,t)=(P−qA)2c2+m2c4+qV
粒子的运动可以用哈密顿量正则方程式表示:
{x˙=∂Px∂H,y˙=∂Py∂H,z˙=∂Pz∂HPx˙=−∂x∂H,Py˙=−∂y∂H,Pz˙=−∂z∂H
束流相空间
当构成束流的所有粒子之间无相互作用时,仅需三个广义坐标(x,y,z)和三个广义动量(Px,Py,Pz)就可以描述粒子的动力学行为。以这三个广义坐标和广义动量为坐标轴,且相互垂直,这样构成的抽象空间叫做六维束流相空间,粒子在某一时刻的运动状态可以由相空间中的一点(相点)来表示,随着时间的推移,相点在相空间产生的曲线叫做相轨迹。
含有N个粒子的束流的运动状况,可由相空间中与之对应的分布于某一区域的N个相点代表,该区域的图形称为束流相图,该区域边界包围的体积称为束流相体积。
根据哈密顿方程解的唯一性,可知相空间中粒子的相轨迹彼此互不相交。由此可知区域内的相点不会移动到区域外边,原来边界上的相点也不会移动到区域内部。这样,束流相图边界的运动、变化就可以代表区域内所有相点的集体行为,也就代表了整个束流的运动行为。
在自然坐标系(x,y,s)的基础上,构建的始终跟随束流的、以同步粒子为原点的(x,y,z)实验室坐标系,坐标x,y,z表示粒子与同步粒子之间的偏离量,并且设计轨道的切线方向总是与z方向一致,这样粒子的位置矢量可以表示为r≡(x,y,s+z)。
位置-斜率束流相空间
通常把组成束流的大量粒子的“质心”定义为参考粒子,参考粒子的运动轨迹与束轴(s轴)始终重合。任意粒子的运动可看作参考粒子的运动与任意粒子相对于参考粒子的运动的叠加。
x和y代表了粒子相对于参考粒子(z轴)的横向偏离位置:
x′=ppx=dsdx=tanθxy′=ppy=dsdx=tanθy
代表了粒子的运动方向,是粒子相对于参考粒子运动方向(s轴)的斜率,θx和θy为粒子轨迹上切线方向与束轴之间x方向和y方向的夹角,即粒子的发散角。在线性近似下,
x′≈θxy′≈θy
对于纵向运动,定义任意粒子相对于参考粒子的纵向分离距离z(s),及其导数z′(s),z′(s)反映了任意粒子相对于参考粒子的速度分散、动量分散和能量分散。
z′=dsdz=dtdzdsdt=v△v=β△β=γ21p△p
六维位置-斜率相空间(x,x′,y,y′,z,z′)
刘维定理
如果组成束流的粒子体系为哈密顿体系(即粒子在相空间的运动规律可以由哈密顿正则方程来描述),则它在相空间中所占的相体积保持为常数。
对于束流传输系统,(x,Px,y,Py,z,Pz)相空间相体积守恒。
对于位置-斜率相空间,(x,x′),(y,y′),(z,y′)并非哈密顿共轭变量,因此刘维定理的应用是有条件的。
对于线性传输系统,粒子运动的轨迹可以写成矩阵形式:
⎣⎡xx′yy′zz′⎦⎤=R⎣⎡x0x0′y0y0′z0z0′⎦⎤
如果线性传输矩阵R的行列式等于1,则六维束流相体积守恒,即线性传输系统中刘维定理的等价表述为:
如果(x,x′),(y,y′),(z,z′)相空间相互之间没有耦合作用,则在各自二维相空间,传输矩阵行列式均为1,相面积分别守恒。
发射度
对于位置-斜率二维相空间,定义横向束流发射度为:
ϵx≡π∫∫dxdx′ϵy≡π∫∫dydy′
根据刘维定理,在无加速和无耦合的情况下,发射度不变:∣R∣=1;
归一化发射度
在有加速但无耦合情况下,定于归一化发射度∣R∣=1:
ϵN=βγϵ
归一化发射度在加速过程中也始终保持不变。
发射度单位:m⋅rad,mm⋅mrad,nm⋅rad,有时也把相面积定义为发射度,表示为:πm⋅rad,πmm⋅mrad,πnm⋅rad。
定义四维超发射度:
ϵ4=π2V4=π2∫∫∫∫dxdx′dydy′
在横向和纵向没有耦合和无加速的情况下,四维超发射度守恒。
束流相椭圆
考虑在(x,x′)二维相空间,假定束流相图是一个以坐标原点为中心的对称椭圆,称为束流相椭圆,相椭圆边界方程为:
σ22x2−2σ12xx′+σ11x′2=C2
式中C为常数,作为椭圆方程,系数应满足:
σ11>0σ22>0σ11σ22−σ122>0
若σ11σ22−σ122=C2则称为标准化椭圆方程,如果σ11σ22−σ122=C2只要在方程两边乘以因子K=σ11σ22−σ122C2方程即可化为标准化椭圆方程。为了讨论方便,以下我们讨论的方程为标准化椭圆方程。
引入相椭圆系数矩阵:
σ=[σ11σ12σ12σ22]
相椭圆方程变为:
σ22x2−2σ12xx′+σ11x′2=∣σ∣
为计算椭圆面积,可采用旋转变换:
{x=ξcosϕ−ξ′sinϕx′=ξsinϕ+ξ′cosϕ
其中转交ϕ满足:tan(2ϕ)=σ22−σ112σ12
因此,相椭圆方程可以变换为:
a2ξ2+b2ξ′2=1
其中a=(σ11+σ22)+(σ22−σ11)2+4σ1222∣σ∣,b=(σ11+σ22)−(σ22−σ11)2+4σ1222∣σ∣。
得到相椭圆的面积为:S=πab=π∣σ∣,另外可以得到相椭圆的最大半宽度xmax=σ11,相椭圆的最大半张角为:xmax′=σ22。
设束流x,x′的分布满足二维正态分布,密度分布函数为:
f(x,x′)=2π∣σ∣1e−2∣σ∣1(σ22x2−2σ12xx′+σ11x′2)
其中,σ11>0,σ22>0,σ11σ22−σ122=∣σ∣。
可以得到:
- <x2>=∫∫x2f(x,x′)dxdx′=σ11
- <x′2>=∫∫x′2f(x,x′)dxdx′=σ22
- <xx′>=∫∫xx′f(x,x′)dxdx′=σ12
截取二维高斯分布一定“高度”的椭圆截面,可用此椭圆的边界来代表束流的整体,以它的运动来代表束流整体的运动,通常取x最大值的一倍<x2>和x′最大值为一倍<x′2>所对应的相椭圆来代表,其面积作为束流发射度。也可取两倍、三倍<x2>和<x′2>对应的相椭圆来代表。
如果束流分布不是高斯分布,也可类似的用统计的方法定义出束流的发射度。
3. Twiss参数,束流特性矩阵
Twiss参数
横向运动方程(Mathier-Hill Equation)为:
x′′+Kx(z)x=0Kx=mvqg=Bρg
y′′+Ky(z)y=0Ky=−Kx
在聚焦情况下,Hill方程的解可以写成:
x(z)=x0cos(kz)+x0′ksin(kz)k2(z)=∣K(z)∣
x′(z)=−x0ksin(kz)+x0′cos(kz)
设方程的两个线性无关解为f1(z)和f2(z),则方程的通解为:x(z)=c1f1(z)+c2f2(z)
{f1′′(z)+K(z)f1(z)=0f2′′(z)+K(z)f2(z)=0⇒f1′′f2−f1f2′′=(f1′f2−f1f2′)′=0
即朗斯基(Wronsky)行列式为常数:
W(z)=∣∣f1(z)f1′(z)f2(z)f2′(z)∣∣=f1f2′−f1′f2=W(0)
令f1(z)和f2(z)为一对复共轭函数,则为保证x(z)为实数,c1和c2必须为一对共轭常数,即:
x(z)=c1f1(z)+(c1f1(z))∗
再令c1=2Aeiδ,f1(z)=ω(z)eiΦ(z),则:
x(z)=Aω(z)cos(Φ(z)+δ)
W(z)=f1(z)f2′(z)−f1′(z)f2(z)=−2iω2(z)Φ′(z)=−2iω2(0)Φ′(0)=W(0)
不失一般性,可选取ω2(0)Φ′(0)=1,则:
Φ′(z)=ω2(z)1
粒子横向运动的相移为:Φ(z)−Φ(0)=∫0zω2(z)dz
将x(z)=Aω(z)cos(Φ(z)+δ)带入横向运动方程,得到:
x′′(z)+K(z)x(z)=A(−2Φ′(z)ω′(z)−ω(z)Φ′′(z))sin(δ+Φ(z))+A(K(z)ω(z)−ω(z)Φ′2(z)+ω′′(z))cos(δ+Φ(z))=0
sin项和cos项系数应分别等于0,cos项系数中代入Φ′(z)=ω2(z)1得到:
−ω3(z)1+K(z)ω(z)+ω′′(z)=0
{x(z)=Aω(z)cos(Φ(z)+δ)x′(z)=−Aω(z)Φ′(z)sin(Φ(z)+δ)+Aω′cos(Φ(z)+δ)
消去三角函数,
sin2(Φ(z)+δ)+cos2(Φ(z)+δ)=(−Aω(z)Φ′(z)x′(z)−ω(z)x(z)ω′(z))2+(Aω(z)x(z))2=1
利用Φ′(z)=ω2(z)1,可以得到:
A21(ω2(z)1+ω′2(z))x2(z)−A22ω(z)ω′(z)x(z)x′(z)+A21ω2(z)x′2(z)=1
令α(z)≡−ω(z)ω′(z),β(z)≡ω2(z),γ(z)=ω2(z)1+ω′2(z),则有:
γ(z)x2+2α(z)x(z)x′(z)+β(z)x′2(z)=A2
并且α,β,γ三者之间始终满足β(z)γ(z)−α2(z)=1,β和α之间有:α(z)=−21β′(z)
粒子横向运动的相移可重新写为:Φ(z)−Φ(0)=∫0zβ(z)dz
说明再(x,x′)相空间,如果粒子初始坐标满足某一椭圆方程:
γ0x02+2α0x0x0′+β0x0′2=A2
经过线性传输系统后,这些粒子的坐标仍然满足某一椭圆方程:
γzxz2+2αzxzxz′+βzxz′2=A2
只是椭圆的形状和转角发生了变化,各粒子的坐标也发生了相应的变化,但椭圆的面积始终保持不变(刘维定理),均为:
S=βγ−α2πA2=πA2
发射度:ϵ=A2γx2+2αxx′+betax′2=ϵ
经过变化后的横向粒子运动方程为:
x(z)=ϵβ(z)cos(Φ(z)+δ)
α,β,γ被称为Twiss参数(或Courant-Snyder参数):
- ϵ的单位:m⋅rad,mm⋅mrad,nm⋅rad,cm⋅mrad
- β的单位:m,cm,mm
- γ的单位:1/m
- α的单位:无量纲
σ=[ϵβ−ϵα−ϵαϵγ]
ϵβ(z)反映了束流包络,β也称作包络函数。包络方程:
2ββ′−β′2+4β2K=4Kβ=γ+α′
βmax的位置通常位于聚焦四级磁铁中间;
βmin的位置通常位于散焦四极磁铁中间。
束流特性矩阵
可以把束流发射度和Twiss参数用矩阵形式表示:
XTσ−1X=1
其中XT=[xx′]
σ−1=ϵ1[γααβ]其逆矩阵为:σ=ϵ[β−α−αγ]
σ为束流特性矩阵,表示束流的横向参数。
假设从位置1到位置2的束流传输矩阵为M,则位置2处的束流特性矩阵为:
σ2=Mσ1MT
由X2Tσ2−1X2=1,将X2=MX1代入,可以得到(MX1)Tσ2−1(MX1)=1,化简得到X1T(MTσ2−1M)X1=1,再将X1Tσ−1X1=1代入,可以得到σ1−1=MTσ2−1M,σ1=M−1σ2(MT)−1,即σ2=Mσ1MT,又:
M=[R11R21R12R22]σ=[β−α−αγ]
可以得到:
⎣⎡β2α2γ2⎦⎤=⎣⎡R112−R11R21R212−2R11R12R11R22+R12R21−2R21R22R122−R12R22R222⎦⎤⎣⎡β1α1γ1⎦⎤
由x1=ϵβ1cos(Φ1+δ),x2=ϵβ2cos(Φ2+δ),△Φ=Φ2−Φ1,将△Φ=Φ2−Φ1代入到x2=ϵβ2cos(Φ2+δ),可以得到:
x1=ϵβcos(Φ+δ)
x2=ϵβ2cos(Φ2+δ)=ϵβ2cos(Φ1+δ+△Φ)=−ϵβ2sin(△Φ)sin(Φ1+δ)+ϵβ2cos(△Φ)cos(Φ1+δ)=beta1β2(x1(cos(△Φ)+α1sin(△Φ))+x′β1sin(△Φ))
x1′=2ϵβϵβ′cos(Φ+δ)−ϵβΦ′sin(Φ+δ)=−βϵβ(αcos(Φ+δ)+sin(Φ+δ))
x2′=−β2ϵβ2α2cos(△Φ)cos(Φ1+δ)+β2ϵβ2α2sin(△Φ)sin(Φ1+δ)−β2ϵβ2cos(△Φ)cos(Φ1+δ)+β2ϵβ2sin(△Φ)sin(Φ1+δ)=β1β21(−x1((α2−α1)cos(△Φ)+(1+α1α2)sin(△Φ))+x1′β1(cos(△Φ)−α2sin(△Φ)))
可得,Hill方程的解x,x′可以用β,α和相移△Φ表示成传输矩阵的形式:
[xx′]z2=⎣⎡β1β2(cos△Φ+α1sin(△Φ))−β1β21+α1α2sin(△Φ)+β1β2α1−α2cos△Φβ1β2sin△Φβ2β1(cos(△Φ)−α2sin(△Φ))⎦⎤[xx′]z1
传输矩阵也可以写成:
[β2−β2α20β21][cos(△Φ)−sin(△Φ)sin(△Φ)cos(△Φ)][β11β1α10β1]
经过一个聚束周期的传输矩阵
考虑周期性结构:
β(z0+Lp)=β(z0)α(z0+Lp)=α(z0)K(z0+Lp)=K(z0)
经过一个周期的相移为:
μ≡△Φ∣z0→z0+Lp△Φ∣z0→z=∫z0zβ(z)dz
经过一个聚束周期的传输矩阵可以写成:
M(z→z+Lp)=[cosμ+αsinμ−γsinμβsinμcosμ−αsinμ]
由于周期性的磁聚焦结构(lattice)的一个周期的相移μ为:
μ=∫0Lpβ(z)dz
在一个周期内的平均β函数可近似表示为:
<β>≈Lp/μ
横向运动的稳定性要求矩阵的秩满足:
∣Tr(M)∣≤2∣cosμ∣≤1
M(z→z+Lp)=[cosμ+αsinμ−γsinμβsinμcosμ−αsinμ]
直线加速器物理-Part5
1. 正电子源,磁铁的有效长度,束流接受度,束流匹配,相空间的丝化
正电子源
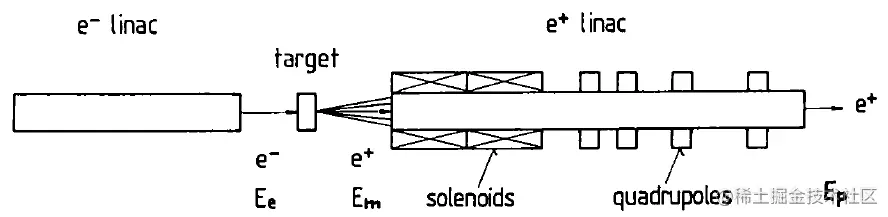
- 正电子源是电子的反粒子,与电子电荷相反,质量相同。可以利用电子直线加速器产生的高能电子,轰击高原子序数金属或合金,在电磁级联簇射过程中产生正电子,通过适当的方法收集,可以得到较强的正电子束流。
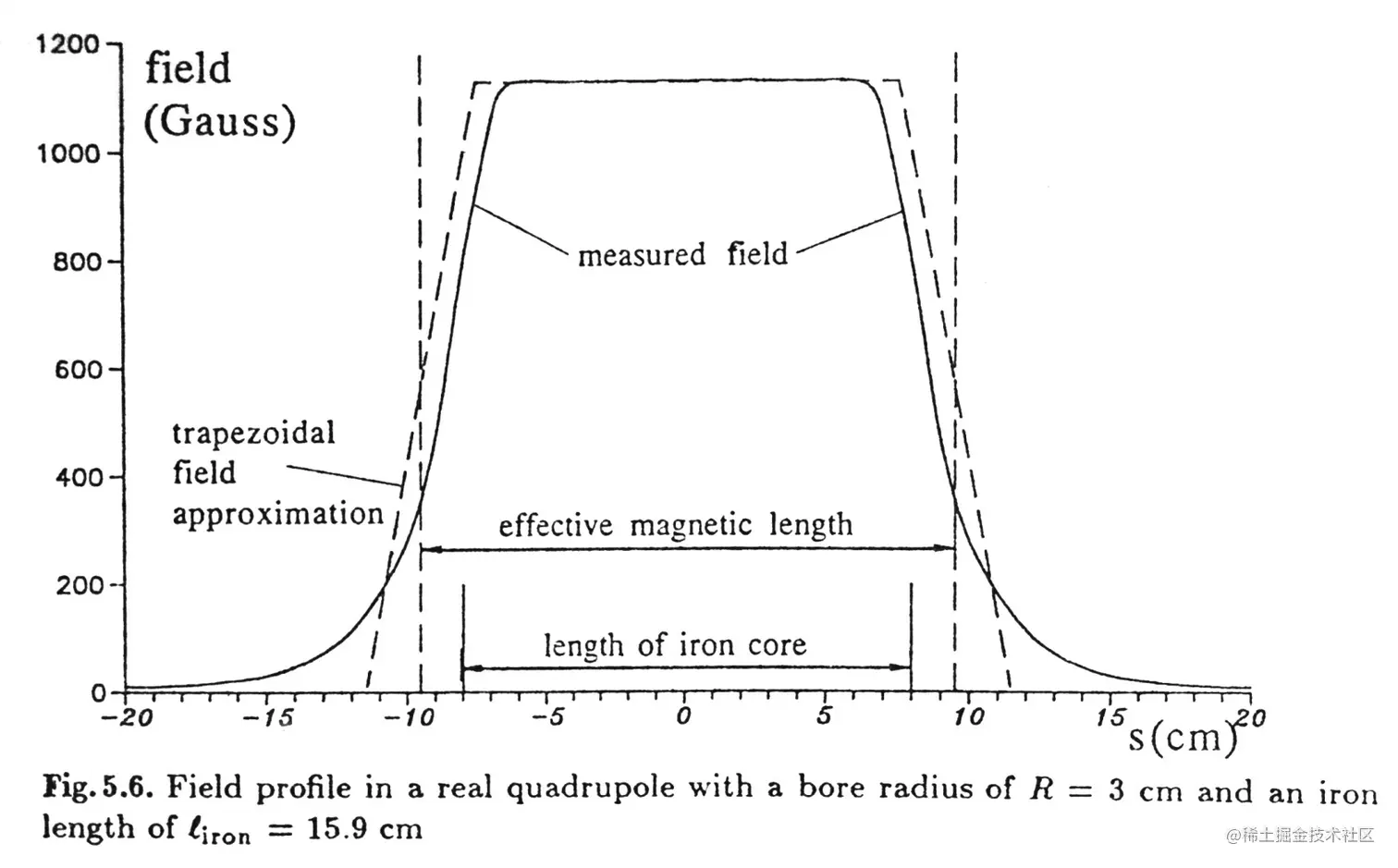
磁铁的有效长度
束流接受度
束流传输系统中各传输元件(加速管、四极透镜、真空盒等)对束流都存在几何限制,任何元件都只有一定相空间区域内的粒子才能通过,此区域外的粒子将在该元件中损失掉。
对于一个束流传输系统,在(x,x′)相空间,能够通过该系统的最大相空间区域称为接受相图,面积称为该系统的接受度,系统的传输矩阵决定了接受相图的形状和大小。
进入传输矩阵的束流,如果发射度相图落在接受度相图之内,束流粒子将全部通过该系统,否则粒子会在系统的某处碰到管壁而损失掉。
发射度相图和接受度相图的形状和大小一致时,从制造上来说最为经济;如果接受度比发射度大很多,相对来说系统的孔径就会加大很多,不经济。
束流传输系统设计时既要考虑接受度留有一定的余量,又要避免余量过大,造成制造成本过大,甚至是制造困难。
通常接受度相图可用接受相图的内切椭圆代替,便于设计和计算。
设计时各处元件所需的孔径可根据束流的包络函数计算得到:
ra=xmax(s)=Aβ(s)
这里ra为加速管、四极透镜等元件的内径,A是传输系统的接受度,β由设计的Lattice决定。
束流匹配
如果注入束的发射度椭圆与接受度椭圆匹配的很好,那么注入束的相椭圆形状与接受度椭圆的形状、方向一致。
如果注入束的发射度椭圆与接受度椭圆不匹配,则注入束的发射度相当于被放大,导致束流的丢失。因此要求在注入点的束流匹配对保持束流品质来说很重要。
在横向相空间(x,x′),(y,y′),很明显束流匹配的条件为:
αbx=αaxαby=αayβbx=βaxβby=βay
因此理论上可以通过调节注入点之前的四块四极磁铁调节注入束的发射度椭圆以匹配接受度椭圆。
如果发射度和接受度不能很好的匹配,则发射度将被放大,放大因此为Bmag:
ϵ2=Bmagϵ1
Bmag=21[βbβ1+β1βb+βbβ1(βbαb−β1α1)2]
其中α1,β1为注入点的接受度参数,αb,βb为注入束适配发射度的参数。
相空间的丝化
八级铁对束流相空间的影响:
{△x′=3KL⋅x0y02−KL⋅x03△y′=3KL⋅x02y0−KL⋅y03
2. 发射度测量,偏转磁铁和边缘角,能散和色散效应,低能段的空间电荷效应
发射度测量
通过多次改变四极磁铁聚焦强度,就可以得到一组束流包络a随四极磁铁聚焦强度K变化的方程组:
⎣⎡a12a22⋮an2⎦⎤=⎣⎡R11(K1)2R11(K2)2⋮R11(Kn)2−2R11(K1)R12(K1)−2R11(K2)R12(K2)⋮−2R11(Kn)R12(Kn)R12(K1)2R12(K2)2⋮R12(Kn)2⎦⎤⎣⎡ϵβ0ϵα0ϵγ0⎦⎤
束团横截面的亮度分布:
L(u)=L0+de−2σu2(u−u0)2
束流的RMS统计
束流中心:
x=<x>,y=<y>,z=<z>
RMS束流包络:
σx≡<(x−x)2>=<x2>−x2
σy≡<(y−y)2>=<y2>−y2
σz≡<(z−z)2>=<z2>−z2
归一化发射度
如果发射度的定义采用相空间(x,Px),那么束流运动的线性变换(包括加速过程),根据刘维定理,并不改变束流的发射度,此发射度即为归一化发射度(normalized emittance)。
定义相空间(x,x′)的发射度在加速过程中不再守恒,我们称之为非归一化发射度(un-normalized emittance或simply emittance)。
考虑到加速情况,横向运动方程为:
x′′+pp′x′+pqgx=0
假设方程的解形式为x=uv,代入到方程中,
vu′′+(2v′+pp′v)u′+(v′′+pp′v′+pqgv)u=0
选择v,使u′项系数为0,即令2vv′=−pp′
偏转磁铁和边缘角
能散和色散效应
低能段的空间电荷效应
3. 尾场效应,短程尾场和长程尾场,BBU,尾场势,横向尾场函数,纵向尾场函数,束流负载效应
尾场效应
短程尾场和长程尾场
BBU
尾场势
横向尾场函数
纵向尾场函数
束流负载效应
直线加速器物理-Part6
1. 单束团纵向尾场效应,多束团纵向尾场效应,单束团横向尾场效应
单束团纵向尾场效应
多束团纵向尾场效应
单束团横向尾场效应
2 质子直线加速器常用的加速结构,渡越时间因子和等效分路阻抗
质子直线加速器常用的加速结构
渡越时间因子和等效分路阻抗
3. 驻波加速结构,加速模式,RFQ
驻波加速结构
加速模式
RFQ
4. 不同直线加速结构,如DTL,CCL, RFQ, 等的特点和区别


