小知识,大挑战!本文正在参与“程序员必备小知识”创作活动。
前言
Hello!小伙伴!
非常感谢您阅读海轰的文章,倘若文中有错误的地方,欢迎您指出~
自我介绍 ଘ(੭ˊᵕˋ)੭
昵称:海轰
标签:程序猿|C++选手|学生
简介:因C语言结识编程,随后转入计算机专业,有幸拿过一些国奖、省奖...已保研。目前正在学习C++/Linux/Python
学习经验:扎实基础 + 多做笔记 + 多敲代码 + 多思考 + 学好英语!
机器学习小白阶段
文章仅作为自己的学习笔记 用于知识体系建立以及复习
知其然 知其所以然!
若查看数学公式不全或显示错误
可以查看:MML学习笔记(十四):向量空间
4.5 向量空间
定义6
设V为n维向量的集合,如果集合V非空,且集合V对于向量的加法和乘法两种运算封闭,那么就称集合V为向量空间
加法封闭:
若a∈V,b∈V,则a+b∈V
乘法封闭:
若a∈V,λ∈R,则λa∈V
定义7
设V为向量空间,如果r个向量a1,a2,...,ar∈V,且满足
- a1,a2,...,ar线性无关
- V中任一向量都可由a1,a2,...,ar线性表示
那么向量组a1,a2,...,ar就称为向量空间V的一个基,r称为向量空间V的维数,并称V为r维向量空间
一般的,由向量组a1,a2,...,am所生产的向量空间为
L={x=λ1a1+λ2a2+....+λmam∣λ1,λ2,...,λn∈R}
Notes:
- 如果向量空间V没有基,那么V的维数为0
- 0维向量空间只含有一个零向量0
- 向量空间V的基就是向量组的最大无关组
- V的维数就是向量组的秩
- 任何n个线性无关的n维向量都可以是向量空间Rn的一个基,其维数为n,称其为n维向量空间
定义8
如果在向量空间V中取定一个基a1,a2,...,ar,那么V中任一向量x都可惟一表示为
x=λ1a1+λ2a2+...+λrar
数组λ1,λ2,....,λr称为向量x在基a1,a2,...,ar中的坐标
特别地,在n维向量空间Rn中取单位坐标向量组e1,e2,...,en为基,则以x1,x2,...,xn为分量的向量x,可以表示为
x=x1e1+x2e2,....,xnen
可见向量在基e1,e2,...,en中的坐标就是该向量的分量
e1,e2,...,en称为Rn中的自然基
Ps:以x1,x2,...,xn为分量的向量x的意思是:x=⎣⎡x1x2...xn⎦⎤
举例
例18
证明:集合V={x=(0,x2,...,xn)T∣x2,...,xn∈R}是一个向量空间
解答
设a=(0,a2,...,an)T∈V,b=(0,b2,...,bn)T∈V
加法封闭性:
a+b=(0,a2,...,an)T+(0,b2,...,bn)T=(0,a2+b2,...,an+bn)T∈V
乘法封闭性:
设λ∈R
有
λa=λ(0,a2,...,an)T=(0,λa2,...,λan)T∈V
注意:第一个元素始终是0
综上:集合V={x=(0,x2,...,xn)T∣x2,...,xn∈R}是一个向量空间
例19
证明:集合V={x=(1,x2,...,xn)T∣x2,...,xn∈R}不是一个向量空间
解答
设a=(1,a2,...,an)T∈V,b=(1,b2,...,bn)T∈V
加法封闭性:
a+b=(1,a2,...,an)T+(1,b2,...,bn)T=(2,a2+b2,...,an+bn)T∈/V
第一个元素是2,而V中所有元素的第一个元素都是1 所以不属于V
加法封闭性不成立
故:集合V={x=(1,x2,...,xn)T∣x2,...,xn∈R}不是一个向量空间
例20
证明:齐次线性方程组的解集S={x∣Ax=0}是一个向量空间(称为齐次线性方程组的解空间)
解答
设a=x1∈S,b=x2∈S
有
Ax1=0,Ax2=0
加法封闭性:
a+b=x1+x2
A(x1+x2)=Ax1+Ax2=0+0=0
说明a+b=x1+x2也是方程Ax=0的一个解
所以
a+b∈S
乘法封闭性:
设λ∈R
λa=λx1
A(λx1)=λ(Ax1)=λ0=0
说明λa也是方程Ax=0的一个解
所以
λa∈S
综上:齐次线性方程组的解集S={x∣Ax=0}是一个向量空间(称为齐次线性方程组的解空间)
例21
证明:非齐次线性方程组的解集S={x∣Ax=b}不是向量空间
解答
因为是非齐次线性方程组,所以存在没有解的情况(齐次一定有一个解:零解)
当S为空集的时候,S一定不是向量空间
向量空间的前提就是集合为非空
当S非空时
设a=x1∈S,b=x2∈S
加法封闭性:
a+b=x1+x2
A(x1+x2)=Ax1+Ax2=b+b=2b=b
可以得到
a+b=x1+x2不是方程Ax=b的一个解
不满足加法封闭性
故:非齐次线性方程组的解集S={x∣Ax=b}不是向量空间
例24
设A=(a1,a2,a3)=⎣⎡22−12−12−122⎦⎤,B=(b1,b2)=⎣⎡10−4432⎦⎤,验证a1,a2,a3是R3的一个基,并求b1,b2在这个基中的坐标
解答
设
b1=x11a1+x21a2+x31a3
b2=x12a1+x22a2+x32a3
即
(b1,b2)=(a1,a2,a3)⎣⎡x11x21x31x12x22x32⎦⎤
记作B=AX
相当于对方程AX=B进行求解
方法就是对(A,B)进行初等行变换,使得A变为E
求方程AX=B的解一般就是对(A,B)进行初等行变换,使得A变为E,原来B位置上的结果就是X(A−1B)
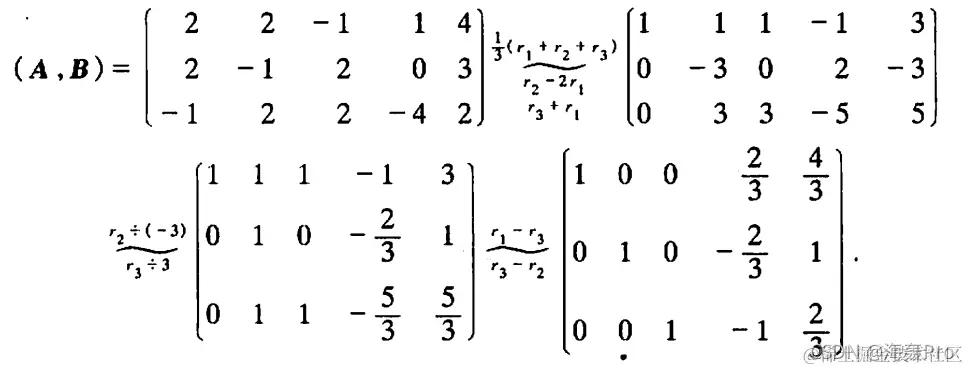 在最后的结果中,可以发现
在最后的结果中,可以发现
R(A)=3
说明a1,a2,a3线性无关,可以作为R3的一个基
同时可得
X=⎣⎡x11x21x31x12x22x32⎦⎤=⎣⎡32−32−134132⎦⎤
说明
b1=x11a1+x21a2+x31a3=32a1−32a2−a3
b2=x12a1+x22a2+x32a3=34a1+a2+32a3
即b1,b2在基a1,a2,a3的坐标依次是(32,−32,−1)、(34,1,32)
结语
说明:
- 参考于 课本《线性代数》第五版 同济大学数学系编
- 配合书中概念讲解 结合了自己的一些理解及思考
文章仅作为学习笔记,记录从0到1的一个过程
希望对您有所帮助,如有错误欢迎小伙伴指正~
我是 海轰ଘ(੭ˊᵕˋ)੭
如果您觉得写得可以的话,请点个赞吧
谢谢支持 ❤️


