应用程序加载
动态库和静态库
- 库:就是可执行代码的二进制形式,被操作系统载入到内存中
- 库在iOS系统中分为两种:静态库和动态库
- 静态库形式:.a 和 .framework
- 动态库形式:.framework 和 .dylib
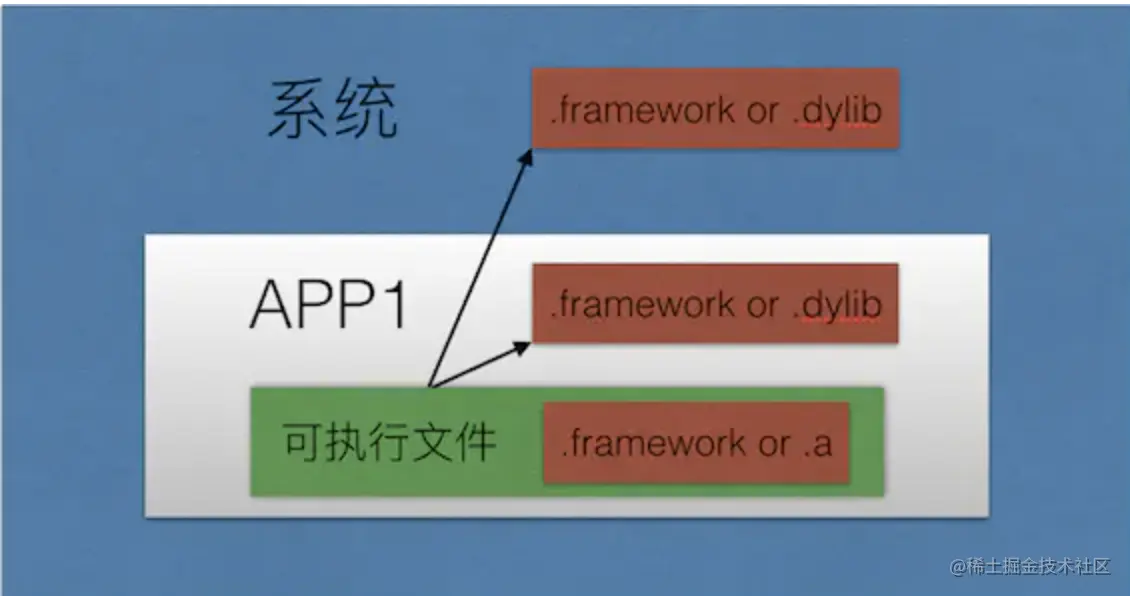
- 静态库:在链接时,是被完全的复制到可执行文件中,会导致重复
- 动态库:在链接时,是由程序加载到内存中,只会加载一次,程序之间会共用,如:iOS系统的库基本都是动态库,这样可以节省内存
- 动态库在打包时,需要检查签名,在
debug时不会报错,签名必须包含TeamIdentifier,如果验证不通过,会报image not found的错误
- 可以通过
codesign , 来验证
codesign -dv /path/to/YourApp.app
codesign -dv /path/to/youFramework.framework

编译过程
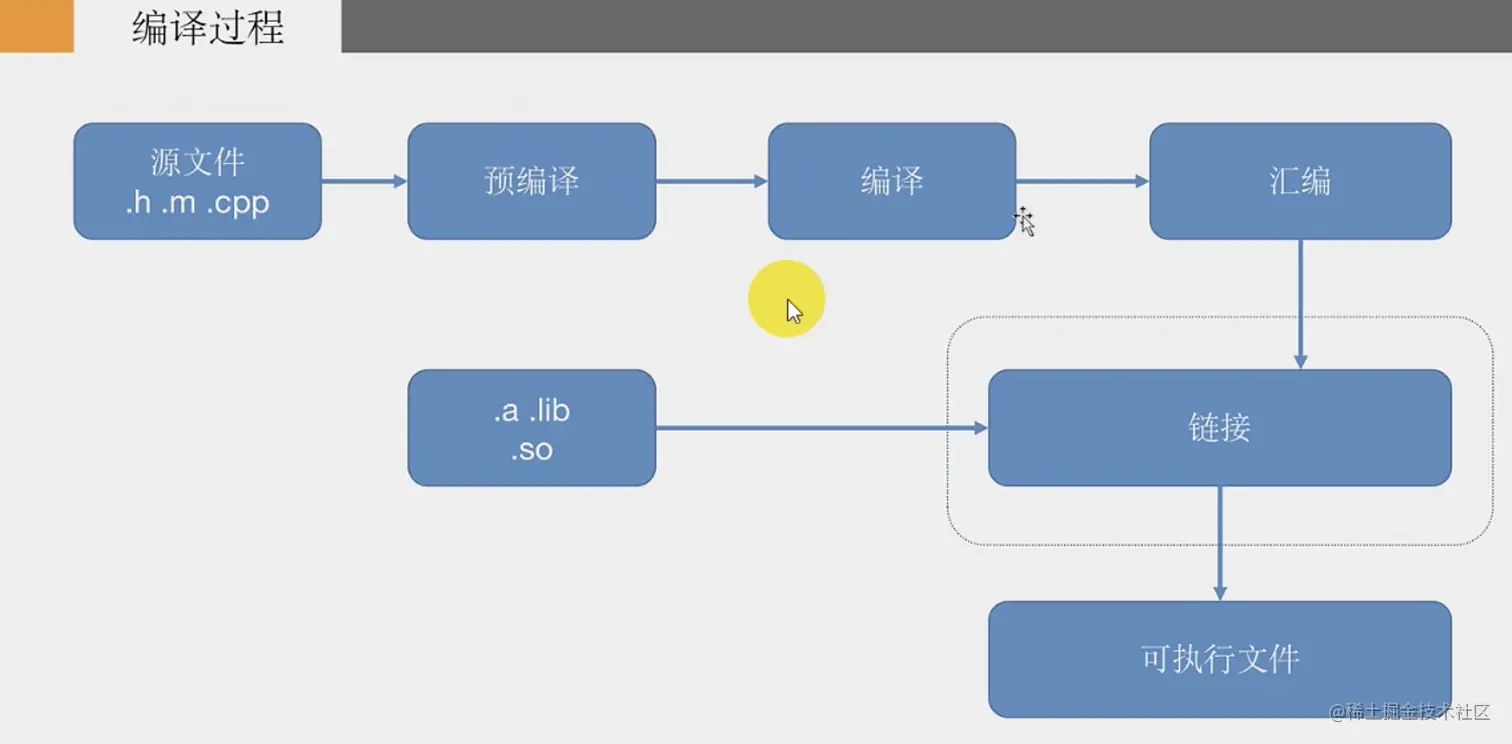
- 想要将库加载到内存中,就需要了解苹果使用的链接器
dyld
什么是dyld
- 全称:the dynamic link editor, 是苹果的动态链接器,是苹果操作系统一个重要组成部分,在系统内核做好程序准备工作之后,交由dyld负责余下的工作。而且它是开源的,任何人可以通过苹果官网下载它的源码来阅读理解它的运作方式, 源码
- 链接过程
- app启动
dyld 加载系统库- 在
objc_intit中注册
dyld流程
load 方法之前
- 我们都知道
类的load方法在main函数之前,那么我们在load方法打一个断点,查看一下load之前的堆栈信息
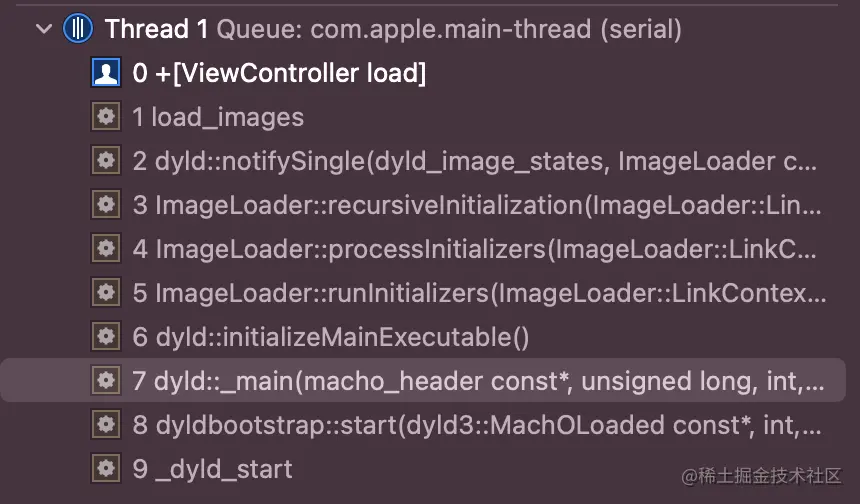
- _dyld_start
- dyldbootstrap::start
- dyld::initializeMainExecuttale
- ImageLoader::runInitalizers
- ImageLoader::processInitaializers
- ImageLoader::recursiveInitialization
- dyld::notifySingle
- load_images
- +load
objc_init 之前
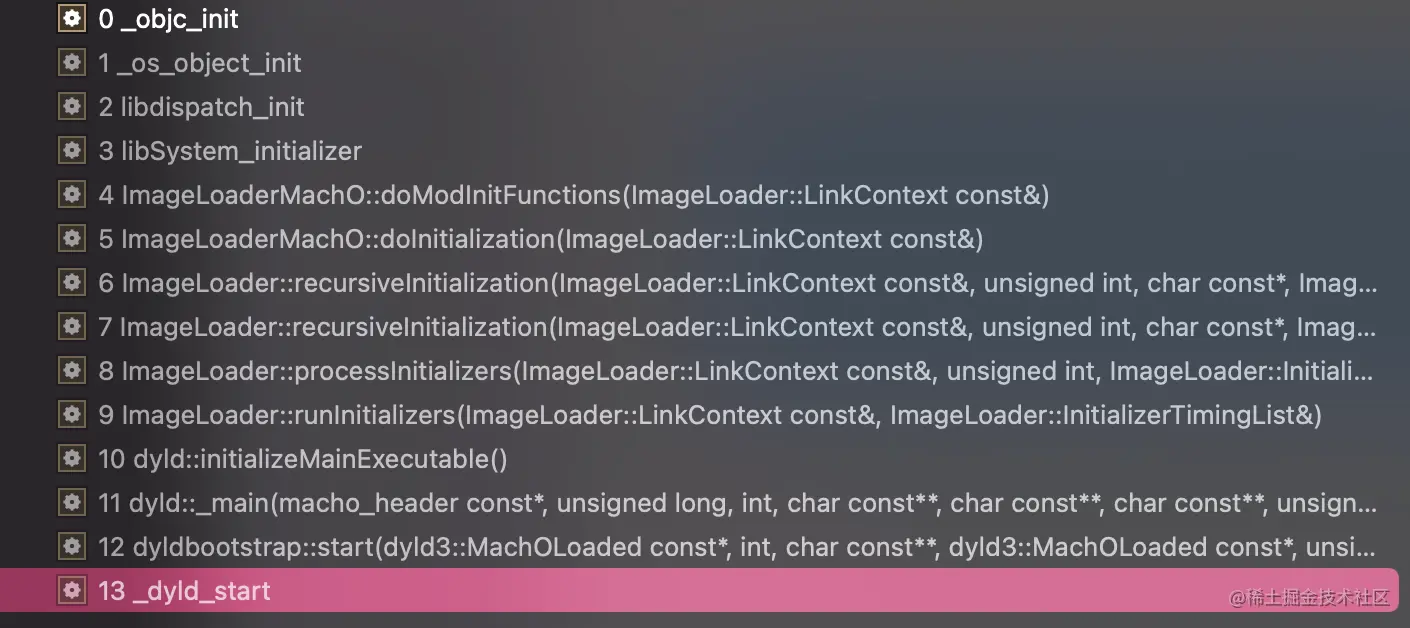
- 可以看出整个流程:
系统 ->
_dyld_start ->
dyldbootstrap::start ->
dyld::_main ->
dyld::initializeMainExecuttale -> ImageLoader::runInitalizers -> ImageLoader::processInitaializers -> ImageLoader::recursiveInitialization ->
imageLoaderMachO::doInitialization ->
imageLoaderMachO::doModInitFunctions ->
libSystem_initializer ->
libdispatch_init ->
os_object_init ->
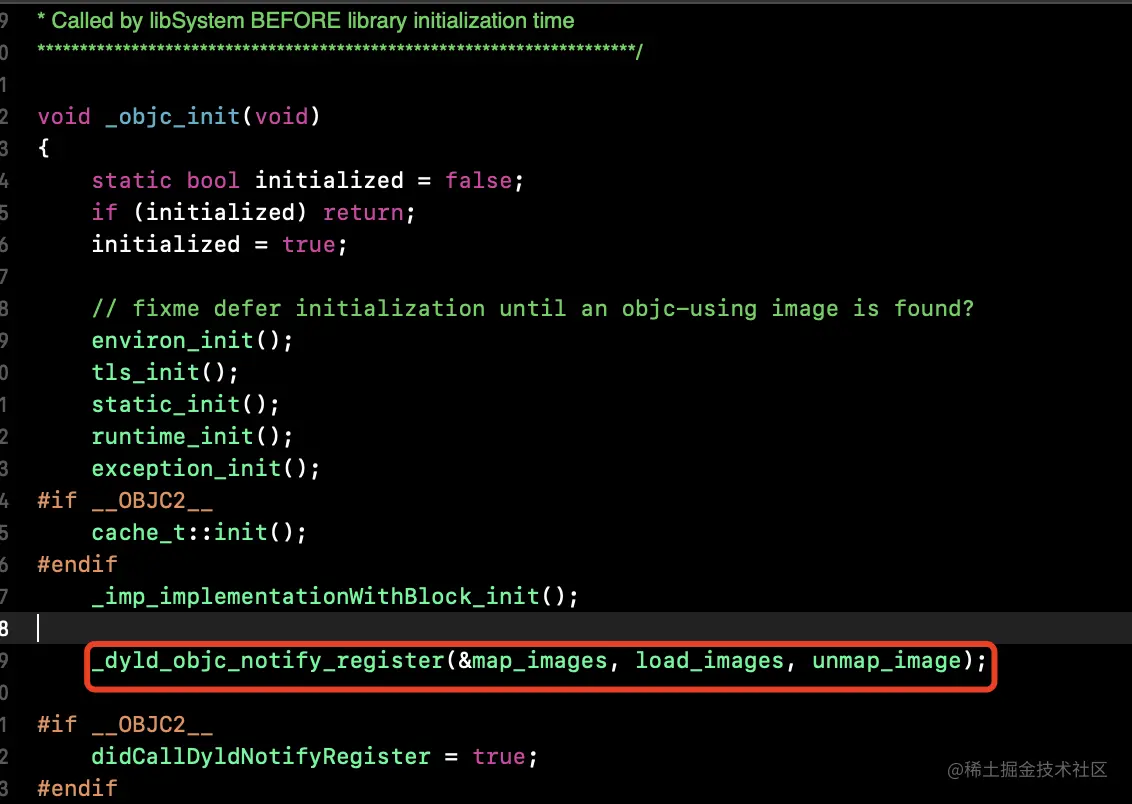
_objc_init ->
(environ_init(), tls_init(), static_init(), ``)
_dyld_objc_notify_register ->
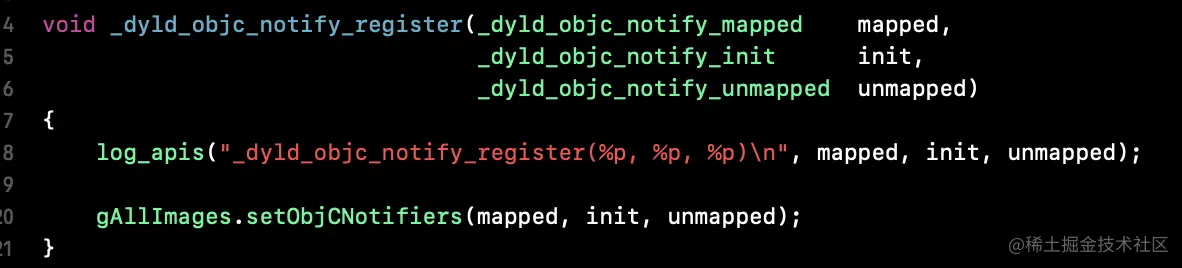
objc_init 同过 _dyld_objc_notify_register(&map_images, load_images, unmap_image)注册通知- 我们是在
objc_init 里注册的dyld通知,并把load_iamges和map_images传了过去
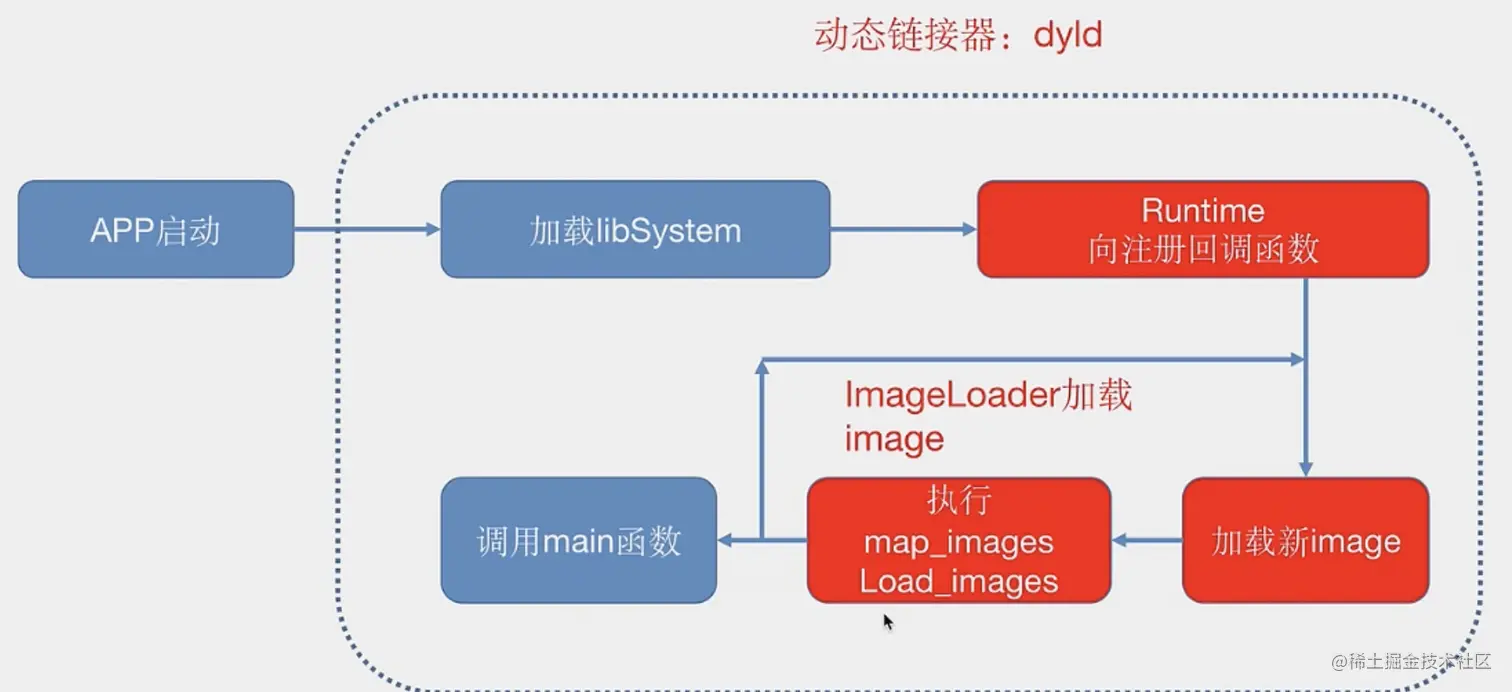
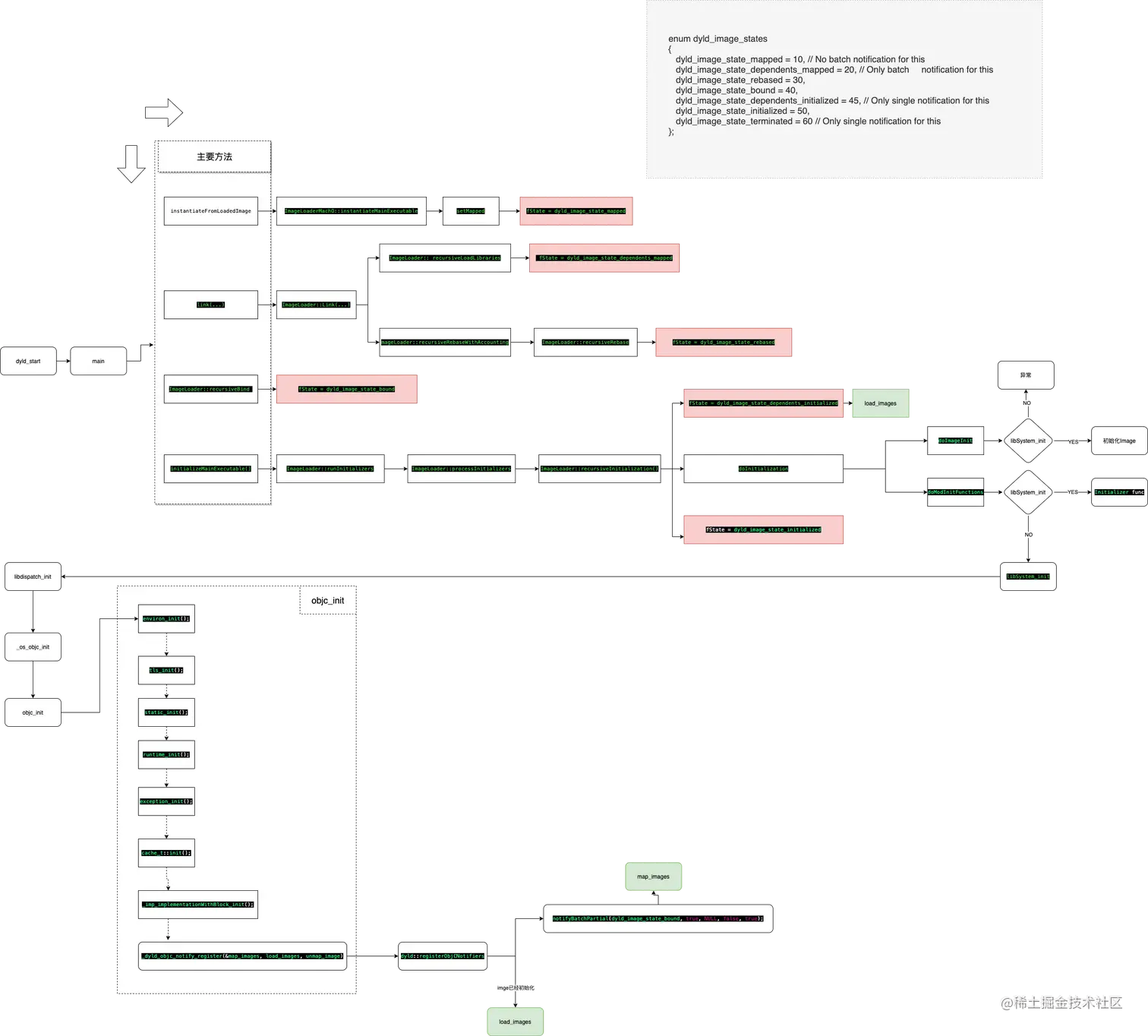
流程图
- 通过
dyld先映射 image
- 然后对链接并递归映射
image的所有依赖
- 然后
rebase,重定位image,也就对image的内存位子进行修正
- 然后
bound,对重新定位的image进行绑定
- 然后 递归初始化
image,准备开始初始化,需要load_images,调用的是runtime源码的
- 递归循环初始化
image,判断有没有初始化libsystem没有的话就会去初始化libsystem, libdispatch, objc_init
- 然后调用
_dyld_objc_notify_register,将 map_images和load_images, unmap_images,交给dyld调用
- 注册之后会立马
map_images
_dyld_start -> dyldbootstrap::start
- 看在最开始的入口
_dyld_start, 查看一下汇编代码可以看到
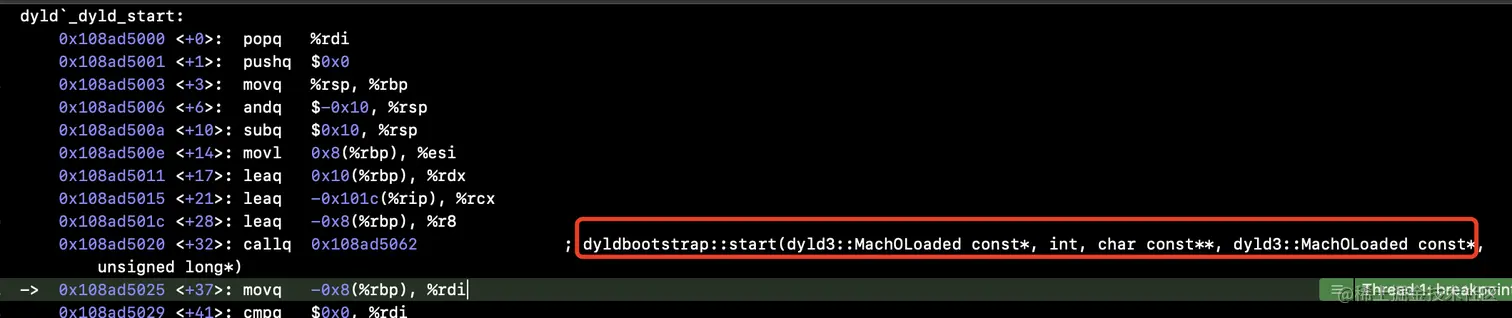
- 实际调用了
dyld的start,那么我们就可以根据dyld的源码去探究一下其具体的流程
- 打开源码,发现
dyld_start是用汇编实现的,根据不同cpu架构有不同的处理,我这里只拿出了arm架构下的代码
#if __arm__
.text
.align 2
__dyld_start:
mov r8, sp
sub sp, #16
bic sp, sp, #15
ldr r0, [r8]
ldr r1, [r8, #4]
add r2, r8, #8
adr r3, __dyld_start
sub r3 ,r3, #0x1000
add r4, sp, #12
str r4, [sp, #0]
bl __ZN13dyldbootstrap5startEPKN5dyld311MachOLoadedEiPPKcS3_Pm
ldr r5, [sp, #12]
cmp r5, #0
bne Lnew
add sp, r8, #4
bx r0
- 官方的注释也很清楚的标注了,会调用
dyldbootstrap::start,dyldbootstrap是命名空间,所以我们可以直接去查看对应的C++代码
dyldbootstrap::start
uintptr_t start(const dyld3::MachOLoaded* appsMachHeader, int argc, const char* argv[],
const dyld3::MachOLoaded* dyldsMachHeader, uintptr_t* startGlue)
{
dyld3::kdebug_trace_dyld_marker(DBG_DYLD_TIMING_BOOTSTRAP_START, 0, 0, 0, 0);
rebaseDyld(dyldsMachHeader);
const char** envp = &argv[argc+1];
const char** apple = envp;
while(*apple != NULL) { ++apple; }
++apple;
__guard_setup(apple);
#if DYLD_INITIALIZER_SUPPORT
runDyldInitializers(argc, argv, envp, apple);
#endif
_subsystem_init(apple);
uintptr_t appsSlide = appsMachHeader->getSlide();
return dyld::_main((macho_header*)appsMachHeader, appsSlide, argc, argv, envp, apple, startGlue);
}
- 在
start中,dyld做了很多初始化
- 重定向修复了
dyld
- 最后调用用了最为重要的
main函数
dyld::_main函数
- 进入到
main函数,发现函数里的代码非常的长,不好阅读
- 可以关注返回值
result,往上推导,找到result赋值的地方,在进行了解
- 通过
result,发现sMainExecutable 跟其息息相关,所以就可以来探索sMainExecutable这个变量,从字面上的意思就可有看出是 主程序
- 先找到
sMainExecutable初始化的地方
static MainExecutablePointerType sMainExecutable = NULL;
sMainExecutable = instantiateFromLoadedImage(mainExecutableMH, mainExecutableSlide, sExecPath);
addDyldImageToUUIDList(); 将 dyld image 添加到 UUID 列表中mapSharedCache(mainExecutableSlide); 加载共享缓存loadInsertedDylib(*lib);加载动态库sMainExecutable->rebase(gLinkContext, -mainExecutableSlide); 重定位sMainExecutable->weakBind(gLinkContext); 弱绑定后只把所有插入的image链接, `sMainExecutable->recursiveMakeDataReadOnly(gLinkContext);initializeMainExecutable(); 初始化所有notifyMonitoringDyldMain(); 通知进程即将进入main()函数 reuslt = (uintptr_t)sMainExecutable->getEntryFromLC_UNIXTHREAD();, 把入口设置给·main()函数
main总结
- 设置运行环境
- 加载共享缓存
- 实例化主程序
- 加载动态库
- 弱绑定主程序
- 链接插入的image
- 执行初始化
- 通知进程将要执行main()
- 返回执行入口
main()
dyld::main() -> initializeMainExecutable
void initializeMainExecutable()
{
gLinkContext.startedInitializingMainExecutable = true;
ImageLoader::InitializerTimingList initializerTimes[allImagesCount()];
initializerTimes[0].count = 0;
const size_t rootCount = sImageRoots.size();
if ( rootCount > 1 ) {
for(size_t i=1; i < rootCount; ++i) {
sImageRoots[i]->runInitializers(gLinkContext, initializerTimes[0]);
}
}
sMainExecutable->runInitializers(gLinkContext, initializerTimes[0]);
if ( gLibSystemHelpers != NULL )
(*gLibSystemHelpers->cxa_atexit)(&runAllStaticTerminators, NULL, NULL);
if ( sEnv.DYLD_PRINT_STATISTICS )
ImageLoader::printStatistics((unsigned int)allImagesCount(), initializerTimes[0]);
if ( sEnv.DYLD_PRINT_STATISTICS_DETAILS )
ImageLoaderMachO::printStatisticsDetails((unsigned int)allImagesCount(), initializerTimes[0]);
}
- 可以看点其内部会调用
runInitializers
initializeMainExecutable -> runInitializers
void ImageLoader::runInitializers(const LinkContext& context, InitializerTimingList& timingInfo)
{
uint64_t t1 = mach_absolute_time();
mach_port_t thisThread = mach_thread_self();
ImageLoader::UninitedUpwards up;
up.count = 1;
up.imagesAndPaths[0] = { this, this->getPath() };
(context, thisThread, timingInfo, up);
context.notifyBatch(dyld_image_state_initialized, false);
mach_port_deallocate(mach_task_self(), thisThread);
uint64_t t2 = mach_absolute_time();
fgTotalInitTime += (t2 - t1);
}
runInitializers -> notifyBatch
static void notifyBatch(dyld_image_states state, bool preflightOnly)
{
notifyBatchPartial(state, false, NULL, preflightOnly, false);
}
runInitializers -> processInitializers(
void ImageLoader::processInitializers(const LinkContext& context, mach_port_t thisThread,
InitializerTimingList& timingInfo, ImageLoader::UninitedUpwards& images)
{
uint32_t maxImageCount = context.imageCount()+2;
ImageLoader::UninitedUpwards upsBuffer[maxImageCount];
ImageLoader::UninitedUpwards& ups = upsBuffer[0];
ups.count = 0;
for (uintptr_t i=0; i < images.count; ++i) {
images.imagesAndPaths[i].first->recursiveInitialization(context, thisThread, images.imagesAndPaths[i].second, timingInfo, ups);
}
if ( ups.count > 0 )
processInitializers(context, thisThread, timingInfo, ups);
}
processInitializers -> recursiveInitialization
void ImageLoader::recursiveInitialization(const LinkContext& context, mach_port_t this_thread, const char* pathToInitialize,
InitializerTimingList& timingInfo, UninitedUpwards& uninitUps)
{
recursive_lock lock_info(this_thread);
recursiveSpinLock(lock_info);
if ( fState < dyld_image_state_dependents_initialized-1 ) {
uint8_t oldState = fState;
fState = dyld_image_state_dependents_initialized-1;
try {
for(unsigned int i=0; i < libraryCount(); ++i) {
ImageLoader* dependentImage = libImage(i);
if ( dependentImage != NULL ) {
if ( libIsUpward(i) ) {
uninitUps.imagesAndPaths[uninitUps.count] = { dependentImage, libPath(i) };
uninitUps.count++;
}
else if ( dependentImage->fDepth >= fDepth ) {
dependentImage->recursiveInitialization(context, this_thread, libPath(i), timingInfo, uninitUps);
}
}
}
if ( this->needsTermination() )
context.terminationRecorder(this);
uint64_t t1 = mach_absolute_time();
fState = dyld_image_state_dependents_initialized;
oldState = fState;
context.notifySingle(dyld_image_state_dependents_initialized, this, &timingInfo);
bool hasInitializers = this->doInitialization(context);
fState = dyld_image_state_initialized;
oldState = fState;
context.notifySingle(dyld_image_state_initialized, this, NULL);
if ( hasInitializers ) {
uint64_t t2 = mach_absolute_time();
timingInfo.addTime(this->getShortName(), t2-t1);
}
}
catch (const char* msg) {
fState = oldState;
recursiveSpinUnLock();
throw;
}
}
recursiveSpinUnLock();
}
dyld_image_state_dependents_initialized, 通知 objc将要初始化 imagedoInitialization 初始化imagedyld_image_state_initialized, 通知objc已经结束初始化image


