

旋转矩阵
和
平移向量
组成
齐次变换矩阵
block操作
| Block operation | Version constructing a dynamic-size block expression | Version constructing a fixed-size block expression |
|---|---|---|
| Block of size (p,q), starting at (i,j) | matrix.block(i,j,p,q) |
matrix.block<p,q>(i,j); |
方法
Matrix3f r; // rotation matrix
Vector3f t; // translation vector
Matrix4f trans; // transformation matrix
trans.setIdentity(); // set to identity
trans.block<3,3>(0,0) = r; // first 3x3 block set to rotation matrix
trans.block<3,1>(0,3) = t; // fourth column set to translation vector
测试
#include <iostream>
#include <exception>
#include <Eigen/Eigen>
using namespace std;
using namespace Eigen;
constexpr float pi = 3.14f;
int main(int argc, char **argv)
{
Matrix3f r; // rotation matrix
Vector3f t; // translation vector
AngleAxisf rot_x (pi/4, Vector3f(1, 0, 0));
r = rot_x.matrix();
t = {0.0f, 0.5f, 0.0f};
/* construct transformation matrix with rotaion matirx and translation vector */
Matrix4f trans; // transformation matrix
trans.setIdentity(); // set to identity
trans.block<3,3>(0,0) = r; // first 3x3 block set to rotation matrix
trans.block<3,1>(0,3) = t; // fourth column set to translation vector
/* print */
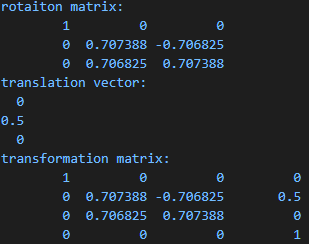
cout << "rotaiton matrix: " << endl << r.format({3}) << endl;
cout << "translation vector: " << endl << t.format({3}) << endl;
cout << "transformation matrix: " << endl << trans.format({3}) << endl;
return EXIT_SUCCESS;
}
输出
参考
- [1] Block operations
