

runloop的目的是有时间时保持线程忙,当没有事件处理时让线程进入休眠。
runloop由CFRunLoop实现,用来监听输入源、调度处理。
输入源指的是输入设备、网络、周期性或者延迟事件、异步回调之类。总结一下就是RunLoop会接受两种类型的输入源:一种来自另一个线程或者不同应用的异步消息;另一种是来自预定时间或者重复间隔的同步事件。
原理
第一步
通知observer:RunLoop要开始进入循环了。
//通知 observers
if (currentMode->_observerMask & kCFRunLoopEntry )
__CFRunLoopDoObservers(runloop, currentMode, kCFRunLoopEntry);
//进入 loop
> result = __CFRunLoopRun(rl, currentMode, seconds, returnAfterSourceHandled, previousMode);
第二步
开启一个do while来保活线程。通知Observers:RunLoop会触发Timer回调、Source0回调,接着执行加入的block。
//通知Observers RunLoop会触发Timer回调
if (currentMode->_observerMask & kCFRunLoopBeforeTimers)
__CFRunLoopDoObservers(runloop, currentMode, kCFRunLoopBeforeTimers);
// 通知 Observers RunLoop 会触发 Source0 回调
if (currentMode->_observerMask & kCFRunLoopBeforeSources)
__CFRunLoopDoObservers(runloop, currentMode, kCFRunLoopBeforeSources);
// 执行 block
__CFRunLoopDoBlocks(runloop, currentMode);
随后触发Source0回调,如果Source1是ready状态的话,就会跳转到 handle_msg 去处理消息。代码如下:
if (MACH_PORT_NULL != dispatchPort ) {
Boolean hasMsg = __CFRunLoopServiceMachPort(dispatchPort, &msg)
if (hasMsg) goto handle_msg;
}
第三步
回调触发后,通知 Observers:RunLoop 的线程将进入休眠(sleep)状态。代码如下:
Boolean poll = sourceHandledThisLoop || (0ULL == timeout_context->termTSR);
if (!poll && (currentMode->_observerMask & kCFRunLoopBeforeWaiting)) {
__CFRunLoopDoObservers(runloop, currentMode, kCFRunLoopBeforeWaiting);
}
第四步
进入休眠后,会等待 mach_port 的消息,以再次唤醒。只有在下面四个事件出现时才会被再次唤醒:
- 基于 port 的 Source 事件;
- Timer 时间到;
- RunLoop 超时;
- 被调用者唤醒。
等待唤醒的代码如下:
do {
__CFRunLoopServiceMachPort(waitSet, &msg, sizeof(msg_buffer), &livePort) {
// 基于 port 的 Source 事件、调用者唤醒
if (modeQueuePort != MACH_PORT_NULL && livePort == modeQueuePort) {
break;
}
// Timer 时间到、RunLoop 超时
if (currentMode->_timerFired) {
break;
}
} while (1);
第五步
唤醒时通知Observer:RunLoop的线程刚刚被唤醒了。
if (!poll && (currentMode->_observerMask & kCFRunLoopAfterWaiting))
__CFRunLoopDoObservers(runloop, currentMode, kCFRunLoopAfterWaiting);
第六步
RunLoop被唤醒后就要开始处理消息了:
- 如果是 Timer 时间到的话,就触发 Timer 的回调;
- 如果是 dispatch 的话,就执行 block;
- 如果是 source1 事件的话,就处理这个事件。
消息执行完后,就执行加到loop里的block。
handle_msg:
// 如果 Timer 时间到,就触发 Timer 回调
if (msg-is-timer) {
__CFRunLoopDoTimers(runloop, currentMode, mach_absolute_time())
}
// 如果 dispatch 就执行 block
else if (msg_is_dispatch) {
__CFRUNLOOP_IS_SERVICING_THE_MAIN_DISPATCH_QUEUE__(msg);
}
// Source1 事件的话,就处理这个事件
else {
CFRunLoopSourceRef source1 = __CFRunLoopModeFindSourceForMachPort(runloop, currentMode, livePort);
sourceHandledThisLoop = __CFRunLoopDoSource1(runloop, currentMode, source1, msg);
if (sourceHandledThisLoop) {
mach_msg(reply, MACH_SEND_MSG, reply);
}
}
第七步
根据当前runloop状态判断是否需要走下一个loop。如果被外部强制停止或者loop超时,就不继续下一个loop,否则就继续下一个loop。
if (sourceHandledThisLoop && stopAfterHandle) {
// 事件已处理完
retVal = kCFRunLoopRunHandledSource;
} else if (timeout) {
// 超时
retVal = kCFRunLoopRunTimedOut;
} else if (__CFRunLoopIsStopped(runloop)) {
// 外部调用者强制停止
retVal = kCFRunLoopRunStopped;
} else if (__CFRunLoopModeIsEmpty(runloop, currentMode)) {
// mode 为空,RunLoop 结束
retVal = kCFRunLoopRunFinished;
}
如下图所示
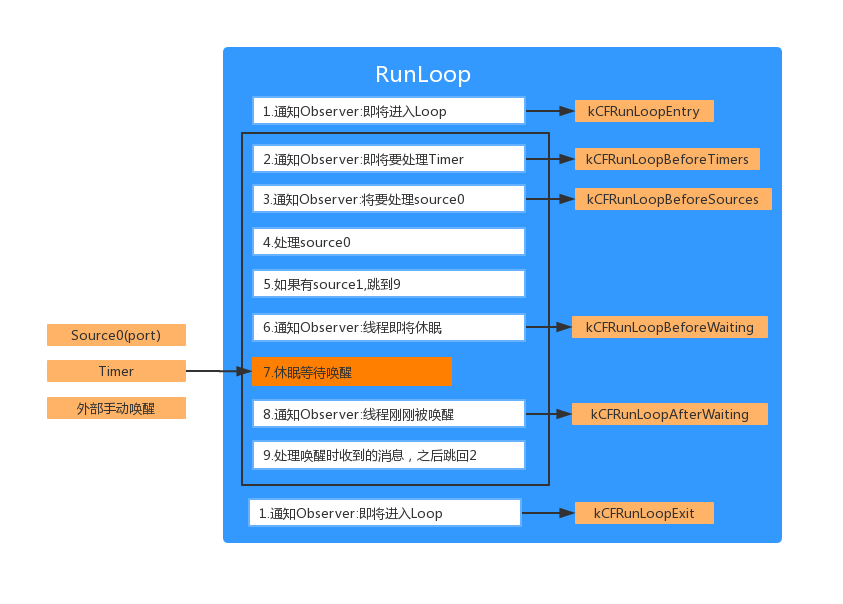
loop的六个状态
loop的状态有6个
typedef CF_OPTIONS(CFOptionFlags, CFRunLoopActivity) {
kCFRunLoopEntry , // 进入 loop
kCFRunLoopBeforeTimers , // 触发 Timer 回调
kCFRunLoopBeforeSources , // 触发 Source0 回调
kCFRunLoopBeforeWaiting , // 等待 mach_port 消息
kCFRunLoopAfterWaiting ), // 接收 mach_port 消息
kCFRunLoopExit , // 退出 loop
kCFRunLoopAllActivities // loop 所有状态改变
}
如果runloop的线程进入睡眠方法前执行时间过长而导致无法进入睡眠,或者线程唤醒后接收消息时间过长而无法进入下一步的话,就可以认为是线程受阻了。如果这个线程是主线程的话,就会表现出卡顿。
如果利用RunLoop原理来监控卡顿的话,就要关注这两个阶段分别是: kCFRunLoopBeforeSources 和 kCFRunLoopAfterWaiting ,也就是要触发 Source0 回调和接收 mach_port 消息两个状态。
