

概述
在图形学渲染管线中,一个顶点坐标,大概要经历局部坐标系、世界坐标系、相机坐标系、裁剪坐标系,最后到窗口坐标系,显示在屏幕上。

在这些过程中,从一个坐标系到另一个坐标系,都需要进行一定的变换。下面,将介绍每次变换的方式。
注意,本文是针对OpenGL的。
局部空间->世界空间
这一变换过程,主要是将模型放置在世界空间中,进行一定的缩放、旋转或平移。这一步比较简单,只要将相应的矩阵作用到模型的局部空间坐标即可。
比如,对模型缩放,然后绕Z轴旋转
度,再进行
的平移。注意,这里的变换顺序是不能变的,即要先进行缩放,再进行旋转,最后进行平移。据此,我们可以构建模型变换矩阵。
世界空间->相机空间
首先定义一下相机:
-
坐标为
-
观察方向
-
向上方向
示意图如下所示:
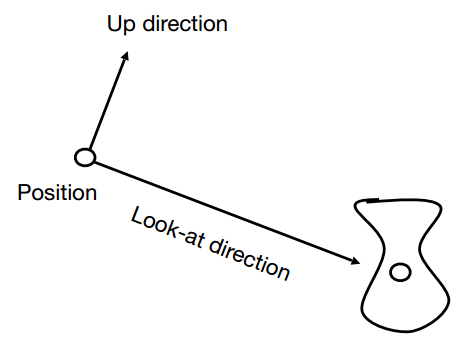
有一个性质注意一下:**当相机和相机“看“到的物体一起变换时,相机”看“到的内容是不变的。**这样,可以将相机的坐标移动到世界坐标的原点,向上方向对齐世界坐标的Y轴,观察方向对齐世界坐标的-Z轴。然后,对物体进行相同的变换即可。
在数学上,这个过程大概这样:
- 将相机移动到坐标原点
- 旋转观察方向
到-Z轴
- 旋转向上方向
到Y轴
- 旋转(
)到X轴
大体分为两步:先位移,后旋转。即。
平移部分:
对于旋转部分,先补充一些知识点。对于二维空间来说:
根据定义,旋转角度和旋转
角度是互逆的,即:
。
所以,对于旋转变换,可以得出旋转矩阵的逆等于它的转置,即:
回到上面的旋转部分,直接求相机的坐标轴旋转到世界坐标轴的矩阵不是很方便,但是反过来,求世界坐标轴旋转到相机的坐标轴很容易:
根据旋转矩阵的逆等于它的转置,得出:
根据,可以得出:
相机空间->裁剪空间
在一个顶点着色器运行的最后,期望所有的坐标都能落在一个特定的范围内,且任何在这个范围之外的点都应该被裁剪掉(Clipped)。被裁剪掉的坐标就会被忽略,所以剩下的坐标就将变为屏幕上可见的片段。这也就是裁剪空间(Clip Space)名字的由来。
因为将所有可见的坐标都指定在-1.0到1.0的范围内不是很直观,所以我们会指定自己的坐标集(Coordinate Set)并将它变换回标准化设备坐标系。
由投影矩阵创建的观察箱(Viewing Box)被称为平截头体(Frustum),每个出现在平截头体范围内的坐标都会最终出现在用户的屏幕上。将特定范围内的坐标转化到标准化设备坐标系的过程(而且它很容易被映射到2D观察空间坐标)被称之为投影(Projection),因为使用投影矩阵能将3D坐标投影(Project)到很容易映射到2D的标准化设备坐标系中。
这里要注意一下,OpenGL是右手坐标系的,但是在NDC中,是左手坐标系的,这里要特别注意!!!
相机空间转换到裁剪空间,有需要用到投影变换。有两种投影变换:正交投影和透视投影。下面分别介绍一下。
正交投影
我们先定义一个正交投影的视锥体(注意,n和f都是负数,f是远平面,所以f<n),它是一个长方体。我们需要做的,就是将正交投影的视锥体转换到标准立方体(即标准化设备坐标,
)。注意,这里
映射到NDC中的[1,-1]。
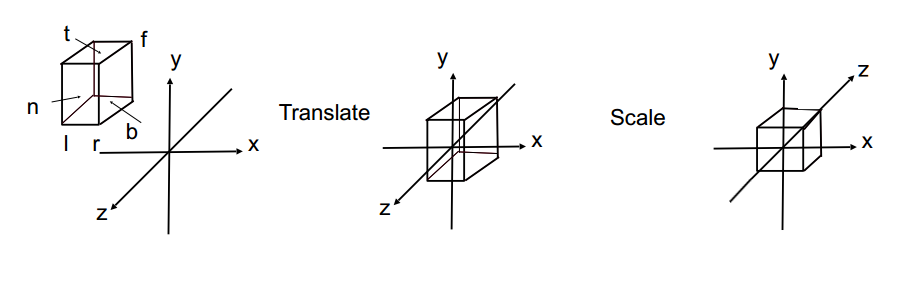
这里,分成两个步骤:平移和缩放。正交投影的矩阵如下:
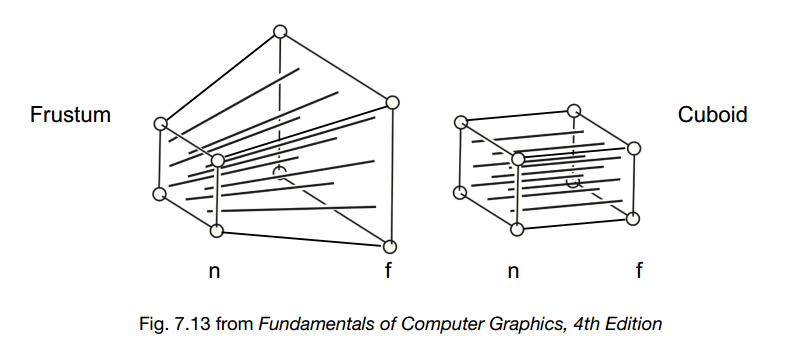
透视投影
对于透视投影,分成两步操作:
- 首先,“压扁”视锥体成一个长方体(n->n,f->f)(
);
- 然后,做正交投影操作(
,即上面的正交投影)。
观察下图:
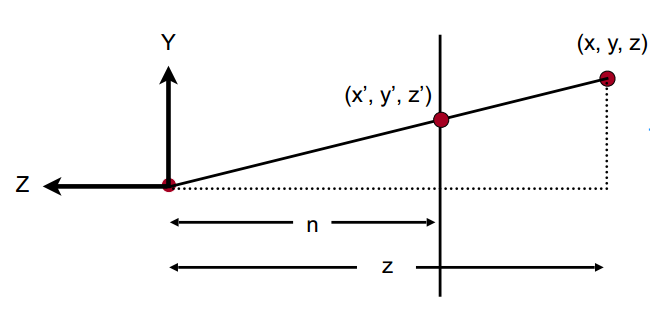
根据相似三角形的关系,可以得出:
类似的,可以得出:
由此,可以得出下面的关系:
下面,说一个齐次坐标的性质:在3D坐标系统中,,
,
都表示相同的坐标---
。例如:
和
都表示坐标
。
所以,有如下关系:
更进一步的,可以得到:
现在,还剩下第三列是未知的。
经过观察上面的透视投影视锥体,可以得出以下推论:
-
近平面上的点的坐标都不会改变;
-
远平面上的点,Z坐标不改变。
根据推论1,近平面上的点经过变换后,不会改变。即:
根据:
因为与x和y都没有关系,所以可以得出
的第三列的形式是
。
根据:
可以得出:
根据推论2,远平面的中心点,经过变换后,还是本身。如下:
所以,可以得出:
即:
到这里,可以得出方程组:
到这里,可以得出:
最终,透视投影矩阵:
裁剪空间->窗口空间
在裁剪空间的最后,所以的可见的点都在标准设备坐标系(NDC)中,即坐标坐落在范围内。
先不考虑Z轴的变换。
从NDC到窗口空间,需要经过视口变换。定义一个屏幕空间:。平面左下角的坐标位
,右上角的坐标为
。对于X和Y坐标的变换,即从
到
。
这里,经过两步变换:
-
将NDC的中心平移到窗口的中心;
-
将NDC的大小缩放到屏幕的大小。
合并到一起:
对于Z坐标,从映射到了
。这里只是简单的线性映射。假设
,当
等于-1时,
等于0;当
等于1时,
等于1。可得如下方程组:
所以,。代入上述
矩阵,可得:
参考
-
[3] Steve Marschner and Peter Shirley,“Fundamentals of Computer Graphics”
