

多种条件限制之下,如何完成真人实景游戏场景下的人脸识别开锁功能?云加社区邀请到腾讯科技产品经理—高树磊,分享他是如何用200行代码,从系统架构、硬件选型、到系统搭建,一步步地实现此精致小巧的人脸识别开锁应用的,希望能和大家一道交流。
一、案例概述
1. 背景
帮朋友实现了一个人脸识别进行开锁的功能,用在他的真人实景游戏业务中。几个月来运行稳定,体验良好,借着此次宅家的时间,整理一下这个应用的实现过程。
总的来说需求描述简单,但由于约束比较多,在架构与选型上还是花了些心思。
2. 部署效果
由于该游戏还在线上服务中,此处就不放出具体操作的视频了。部署效果如下图所示:
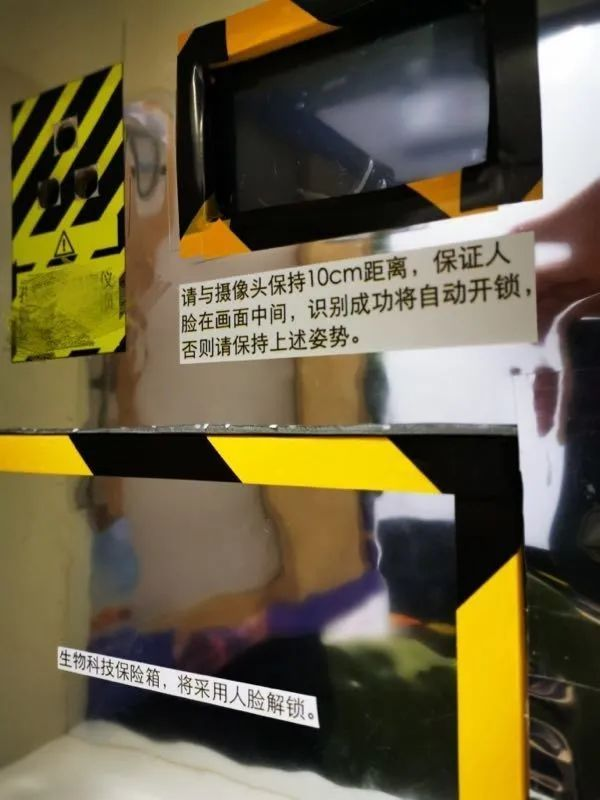
- 玩家发现并进入空间后,在显示屏看到自己在当前场景出镜的实时画面。
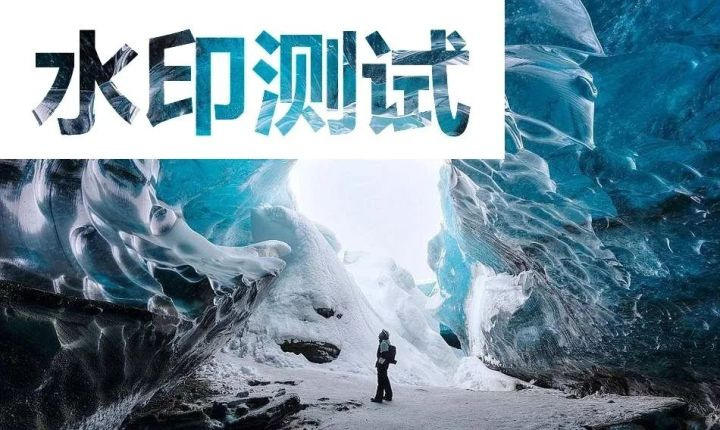
- 玩家靠近观察时,捕获当前帧进行人脸识别,实时画面中出现水印字幕“认证中”
- 人脸认证失败时,实时画面水印字幕变更为“认证失败”,字幕维持2秒后消失,恢复初始状态。玩家继续寻找游戏线索,重新进行认证。
- 人脸认证成功时,实时画面水印字幕变更为“认证成功”,并弹开保险箱门。进入后续游戏环节。
二、产品要求
1. 需求说明
需求提出时比较明确,核心逻辑不复杂。
- 人脸识别:通过人脸识别进行鉴权。
- 开锁管理:通过鉴权则打开箱门,未通过则保持锁定。
- 反馈提示:需要有实时视频反馈,指引明确,便于优化玩家体验。
2. 约束说明
毕竟是生意,所以在商言商,对实用性和成本要求很高,关键是不要影响游戏过程,同时保证玩家体验。
- 低成本:需要低建设成本,低维护成本。
- 易维护:对维护人员技术水平要求低,出现软硬件故障时,任意店员可以快速恢复。
- 高可靠:识别准确率高,容错能力强,系统持续运行中故障率低。
- 有限空间:整套系统在去除显示屏、电磁锁、保险箱后,其它结构实施空间不能超过20cm*15cm*15cm 体积。
- 采光不足:实景空间小,有顶光无侧光,曝光时间较长。
- 通用供电:只提供5V、12V两种直流电接口。
- 并行处理:鉴权流程与反馈流程并行,鉴权过程中,反馈系统不能出现中断、阻塞等情况,使玩家有明显的中断、卡死体验。
- 弱网络环境:由于房间隔断多,网络共用,所以网速有限,有突发延迟情况。
3. 功能设计
可能的架构方案有多种(不同方案间的比较,在文末进行),下面展开说明一下最终上线的方案。
(1) 设定流程
流程与效果,请参考前文“玩家体验” 部分内容。
(2)可配置内容
a. 腾讯云密钥对
修改配置文件,用于适配腾讯云账号切换功能(测试账号/正式账号)。
b. 人员库ID
修改配置文件,用于指定不同人员库(测试库/正式库)。
c. 水印提示
更换对应图片,实现更换水印。使用图片管理,而不是文字配置的原因,是由于图片配置模式无需字库支持,无需配置显示大小,易于图案嵌入。由于所见即所得,对维护人员要求低。
d. 关机选项
可配置任务完成后,是否自动关机。用于游戏环境复位准备,减少复位工作量。
(3) 运营与维护
a. 系统运营管理
场景启动时,统一上电。认证通过后,自动关机,完成复位。
b. 故障处理
软硬件故障:无法开机、可开机无显示、可开机显示系统异常,可开机未知异常等等,更换树莓派或其它硬件。网络故障:正常运行,无法认证,可查网络+查云日志,解决网络问题;云产品异常:运行4个月,未发生过,可以忽略,如发生则联系云售后;
(4) 成本分析
硬件成本:500~600元。
备件成本:按1:1备件,500~600元。
运行成本:云端0元,使用免费额度;电费网费,忽略不计。
二、技术实现
1. 系统架构
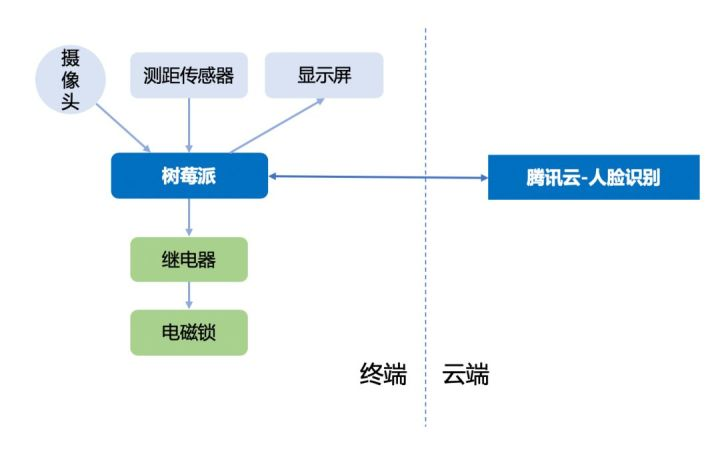
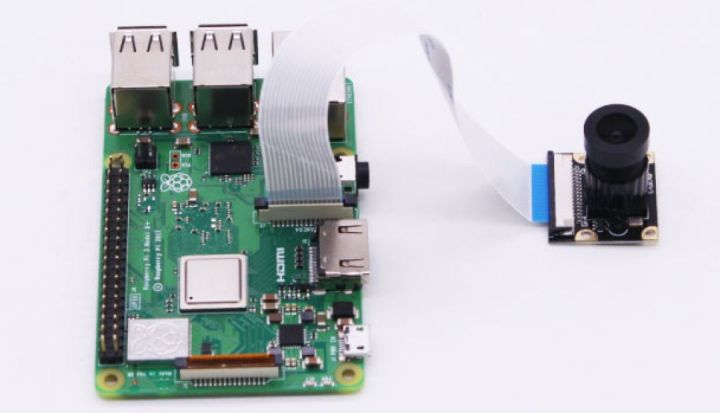
(1)硬件组成
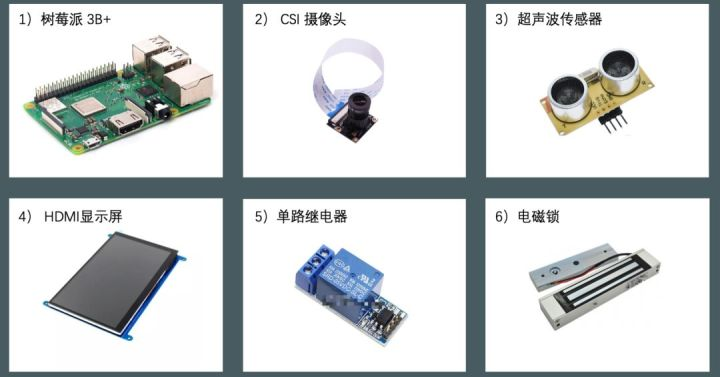
树莓派:终端主控摄像头:视频输入传感器:超声波测距显示屏:视频输出继电器:控制电磁锁电磁锁:控制保险箱门
(2)关键特性
图片识别:使用图片识别,而非视频流,减少对网络带宽要求。识别要求低:欠曝光照片也有高识别率。触发识别:玩家在场景内活动时间长,触发模式避免了高频认证、误开锁情况,同时降低认证成本。测距选型:超声波传感器技术成熟,成本低(3元);激光传感器成本高(30元)多进程:视频处理与监测鉴权由两个进程实现,避免了阻塞等情况,同时使用进程间通信,实现可靠交互。
2. 系统搭建
(1) 腾讯云配置
a. 注册账号
按文档指引,获取API密钥
b. 配置人脸识别
访问官网控制台,通过“新建人员库->创建人员->上传照片”,建立认证基础。其中所使用的“人员库ID”是关键信息,用于后续API调用识别时,指定认证动作匹配的人员库。注:由于此案例只识别一个人员,无需对人员ID进行匹配,故不用指定人员ID。
(2)树莓派配置
a. 安装系统
访问 www.raspberrypi.org 获取镜像,并进行安装。注意必须安装桌面版,否则需要单独管理HDMI输出。
b. 配置网络
进入命令行,执行 "raspi-config",选择"Network Options",配置WiFi接入点。为了固定IP,编辑 /etc/dhcpcd.conf 文件,添加配置信息。
# 具体内容请参考你的本地网络规划
interface wlan0
static ip_address=192.168.0.xx/24
static routers=192.168.0.1
static domain_name_servers=192.168.0.1 192.168.0.2c. 安装腾讯云SDK
参考指引文档,安装调用腾讯云API的依赖库。
sudo apt-get install python-pip -y
pip install tencentcloud-sdk-pythond. 安装图像处理库
系统默认安装python2.7,但没有 opencv 库,需要安装。(下载包体积较大,默认源为国外站,比较慢。树莓派改国内源方法,请自行百度,并挑选离自己近的源站)
sudo apt-get install libopencv-dev -y
sudo apt-get install python-opencv -ye. 部署代码
访问github获取源码,将src文件夹内容,复制到 /home/pi/faceid 下。更改 /home/pi/faceid/config.json 中的配置信息,必须改为你的 云API密钥(sid/skey)、人员库ID(facegroupid),其它配置按需调整。
f. 配置自启动
需要配置图形界面自启动,保证视频输出由HDMI接口输出至显示屏,编辑 /home/pi/.config/autostart/faceid.desktop 写入如下内容
Type=Application
Exec=python /home/pi/faceid/main.py (3)硬件接线
树莓派GPIO图示:
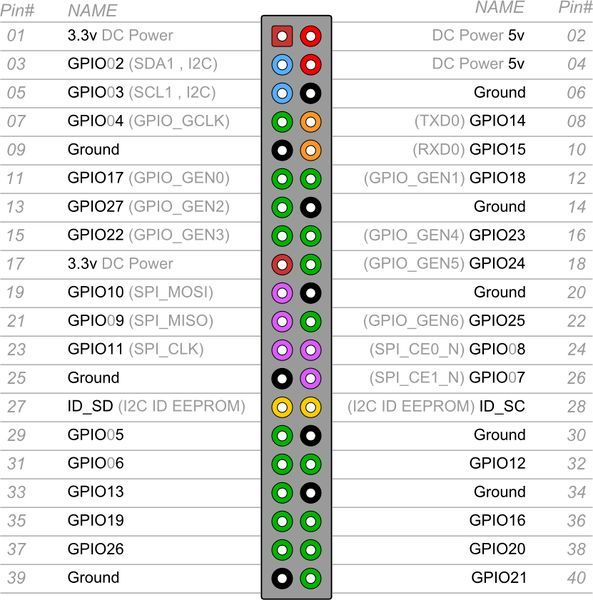
- CSI接口
b. 超声波传感器
- TrigPin:BCM-24 / GPIO24
- EchoPin:BCM-23 / GPIO23
- VCC :接5V
- GND :接GND
c. 继电器
4引脚侧 接 树莓派GPIO引脚
- VCC :接5V
- GND/RGND :接GND
- CH1 : BCM-12 / GPIO12
3端口侧 接 电磁锁
- 初始状态为电磁锁接常闭端。
- 继电器原理请参考 3.3.4 硬件相关 部分。
(3) 测试运行
完成上述工作后,接电启动系统,本地反馈查看显示屏,云端识别结果可查看系统日志。
3. 代码逻辑与涉及技术
(1) 流程伪代码
# 监测鉴权进程-主进程
获取应用配置(API ID/Key 等)
初始化GPIO引脚(准备控制 传感器、继电器)
启动视频管理进程(辅进程)
循环开始:
if not 测距达到触发标准:
continue
与辅进程通信(捕获当前帧,并存入指定路径,并添加“认证中”水印)
调用云API,使用该帧图片人脸识别
if 识别成功:
与辅进程通信(变更水印为“认证成功”)
等待5秒
关机 或 继续运行(由config.json中 su2halt 字段指定)
else:
与辅进程通信(变更水印为“认证失败”)
等待2秒
与辅进程通信(清除水印)
# 视频管理进程-辅进程
初始化摄像头
循环开始:
取帧
取进程间共享队列
按消息进行不同操作(帧图像保存/加不同水印/不处理)
输出帧(2)视频与识别
a. 实时视频
如上文伪代码所示,通过逐帧处理,并连续输出,显示实时视频。
b. 触发识别
测距传感器确认物体靠近,且0.3秒内距离变化小于2cm,确认为待认证状态。再延时0.3秒,进行图像帧捕获。再次延时的原因是物体停止时,会有扭转、微调等动作,若直接取帧,会由于采光不足(上文提到的约束)出现模糊情况,所以再次延时,确保捕获稳定图像。
c. 人脸识别
请参考文档介绍。
(3) 图像水印
a. 水印原理
opencv中,提供了多种图像处理函数,如:图文处理(图加字)、图图处理(图间加/减/乘/除/位运算)等等。通过不同的处理方式,可以实现 底图加字、底图加图、掩膜处理等等多种效果。本案例中使用的是基于位运算的掩膜处理方式。
b. 水印图片
为了便于维护和更新,本案例中使用图片做为水印来源,避免字库约束,也增大了灵活性,易于在水印中增加图形,并以分辨率直接定义水印大小,所见即所得。默认水印图片为白底黑字。
c. 水印处理逻辑
为突出水印的浮动效果,将水印图片中的黑色区域透明化后,叠加到原始图片中。由于字体透明效果,水印字体颜色随基础视频变化,效果比较明显。源码说明
# img1为当前视频帧(底图),img2为已读取水印图
def addpic(img1,img2):
# 关注区域ROI-取底图中将被水印图编辑的图像
rows, cols = img2.shape[:2]
roi = img1[:rows, :cols]
# 图片灰化-避免水印图非纯黑纯白情况
img2gray = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY)
# 生成掩膜-过滤浅色,位运算取非
ret, mask = cv2.threshold(img2gray, 220, 255, 3) #cv2.THRESH_BINARY
mask_inv = cv2.bitwise_not(mask)
# 生成水印区图像-底图裁出字体部分,生成水印区最终图像,替换原图水印区
img1_bg = cv2.bitwise_and(roi, roi, mask=mask_inv)
dst = cv2.add(img1_bg, img2)
img1[:rows, :cols] = dst
return img1水印效果示意图(示意图扩大了水印区,用于突出效果,实际应用方案中水印区较小)
(4)硬件相关
a. 超声波测距
超声波传感器(4引脚:VCC、Trig、Echo、GND),Trig端输出一个大于10μs的高电平,激活发出超声波,并在收到反射波后,Echo端会输出一个持续高电平,持续时间就是“发波至收波”的时间。即:测距结果(米)=Echo端高电平时长*340米/2
b. 继电器
使用的5V继电器模块有双侧接线,一侧为供电与信号(4引脚,兼容3.3V信号),一侧为通路开闭管理(3端口)。继电器在“通路管理侧”实现了一个“单刀双开关”的模式,通过“供电与信号”侧“CH1引脚”的高低电平,控制单刀的方向。在安装过程中,电磁锁供电默认接继电器常闭端,对继电器给出信号后,继电器切换到常开端,则电磁锁断电开锁.
c. GPIO
GPIO(General-purpose input/output 通用输入输出),以引脚方式提供硬件间的联系能力。树莓派 3B+,有40个GPIO引脚(请参考 3.2.3 硬件接线 中的参考图示),树莓派官方操作系统 Raspbian 下,可以使用系统默认安装的 python 中 RPi.GPIO 库,进行操作。
三、其它方案介绍
1. 方案选型对比
设计的核心在于人脸鉴权模块,这里直接影响成本和稳定性,最后选择了上文方案(平衡成本、维护性及可靠性)。曾经的其它几种备选人脸识别方案:
(1) 本地识别A方案
使用ESP-EYE芯片,均由芯片完成,依赖ESP-IDF、ESP—WHO,使用C进行开发。低硬件成本(模块成本189*2),高开发维护成本(C开发)。问题:难于更新配置与故障分析处理。适用于大量部署场景。
(2) 本地识别B方案
使用树莓派直接进行人脸识别,方案成熟,开源代码丰富。中硬件成本,低开发成本,高维护成本。问题:树莓派负载高,即使用间隔帧算法,也仅维持在20fps以下,卡顿明显。如进一步调优,受限于个人经验问题,恐难以保持长期稳定运行。
(3) 本地识别C方案
使用 BM1880边缘计算开发板 或其它图像处理板,社区口碑不错,有框架支持。问题:高硬件成本(模块成本1000*2),高开发维护成本(C开发)。如果使用算力棒,需要X86_64做基础平台,成本降低有限,复杂度不变。适用于扩展能力场景。
(4) 云端识别A方案
使用腾讯云视频智能分析产品,简化终端架构,使用树莓派zero推流上云(后续放出实现方案),即可获取识别结果,且支持高频多次检索等特性。部署成本低(终端视频相关模块150元),运营成本低(当前0.28元/分钟,按该场景下单次运行20分钟计算,单次游戏成本5.6元)问题:对网络稳定性依赖大,断流等情况影响体验。在本案例的网络约束下,影响使用效果,更适于网络条件较好、高频检索的应用场景。
