

脸书与卡内基美隆大学合作,共同开发了机器人控制框架PyRobot,希望让研究人员能够在几小时内,在不需要具备硬件或是设备驱动器等相关细节知识,就能启动并且使机器人开始运作。脸书提到,他们希望提供一个像深度学习开发框架PyTorch这样的机器人框架,提供一定程度的抽象,以简化系统建置工作,也让共享函式库和工具更为简单。
PyRobot是机器人操作系统ROS上的轻量级高阶接口,提供了一组无关硬件的中介API,供开发人员控制各种的机器人,PyRobot抽象了低阶控制器与程序之间沟通的细节,因此对于人工智能研究人员来说,可以不再需要理解机器人的低阶操作,能够专注地建置高阶人工智能机器人应用程序。
研究人员可以使用PyRobot中,适用于各种机器人的通用功能,控制机器人关节的位置、速度或是力矩,还能使用复杂的功能,包括笛卡尔路径规画或是视觉SLAM等。PyRobot目前虽然仅支持LoCoBot和Sawyer机器人,但还会继续增加支持各种不同的机器人。PyRobot虽然提供抽象的高阶控制,但仲博收容所研究人员依然可以使用不同层级的组件,像是能够绕过规画器,直接设定关节速度和力矩等。
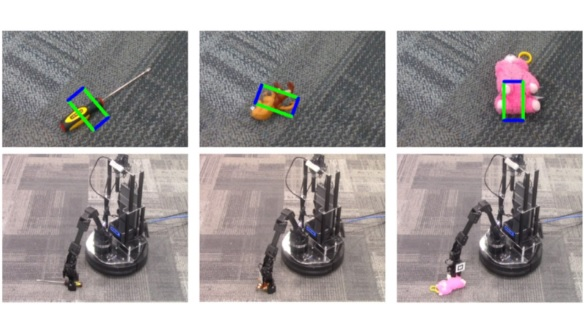
脸书已经将PyRobot用在各种的机器人应用上,像是点到点的导航,或是推与抓的任务,也用在远程操作以收集训练机器人的资料。PyRobot中包含了一些现成的算法实作,并提供可将自行开发的算法,简单地部署到机器人上的方法,脸书也提到,研究人员可以使用PyTorch训练深度学习模型,并使用PyRobot在机器人上执行算法。
PyRobot可以让研究社群更容易地使用机器人数据集、算法实作以及模型,同时也能帮助他们订定基准,得以互相比较成果,或是基于其他人的成果往前发展,脸书表示,像是在使用LoCoBot这类低成本的机器人平台,PyRobot有助于降低进入门坎,并使研究成果能够与其他人分享。脸书也顺势在PyRobot释出的同时,公开了一项征求提案活动,任何研究团队都可以提交PyRobot搭配LoCoBot的研究提案,获胜者可以赢得一份研究用LoCoBot工具包。
