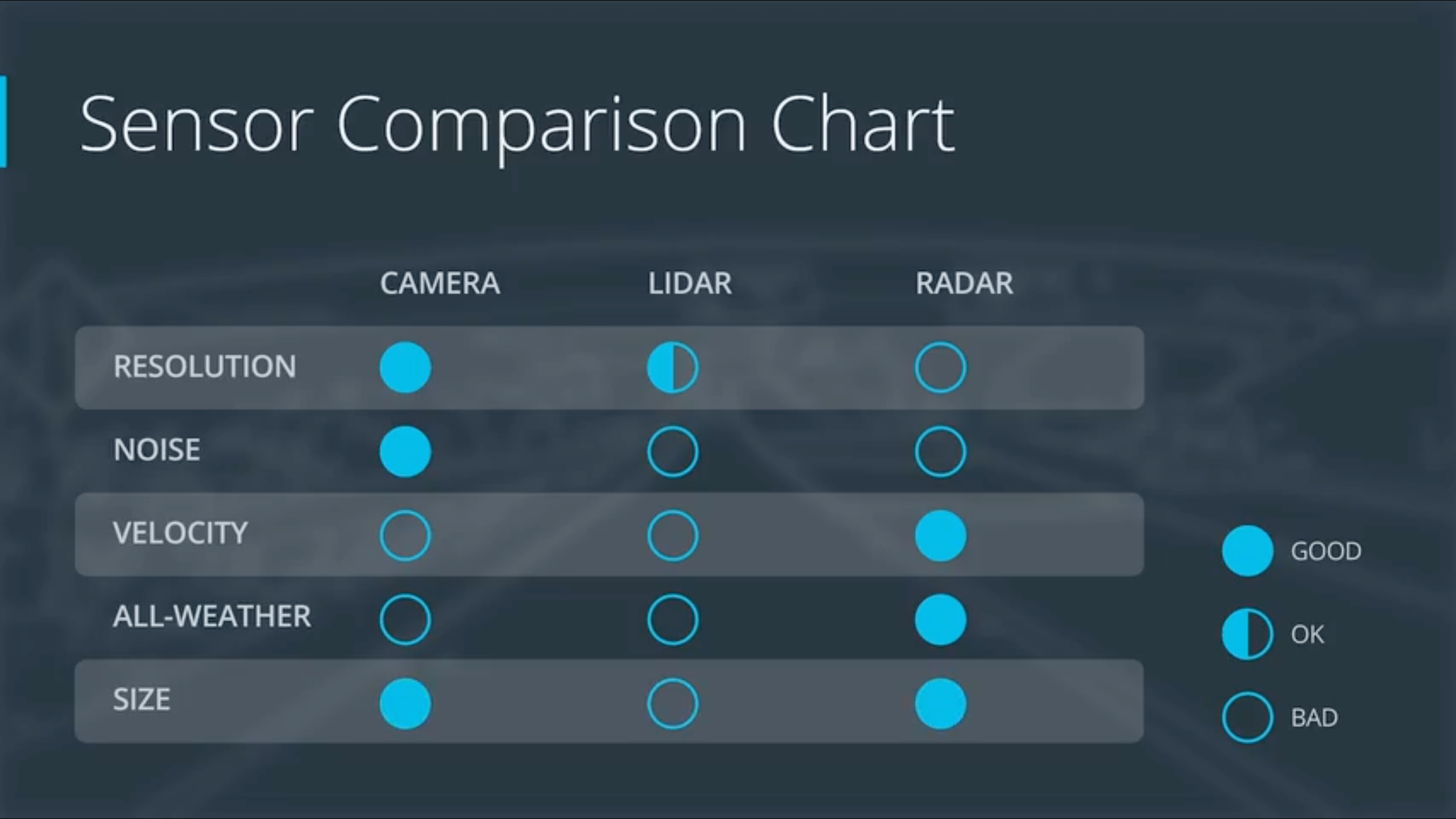
Sensor
对于无人驾驶系统而言,多传感器已经是默认配置
Kalman Filter 卡尔曼滤波
Kalman Filter 经常运用于无人驾驶系统中感知模块,用于目标状态估计。用人话说,就是物体追踪。
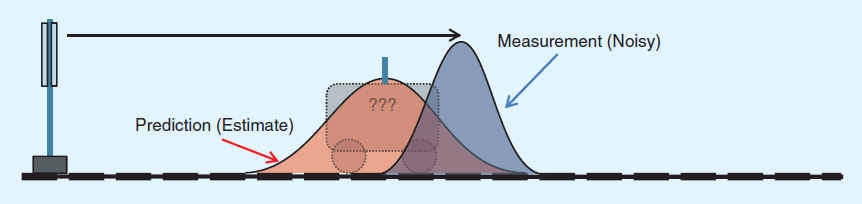
简单来说,有个运动的小车,用来测量小车运动的传感器其实有测量噪声 (Measurement Noise),所以得到的结果是个高斯分布
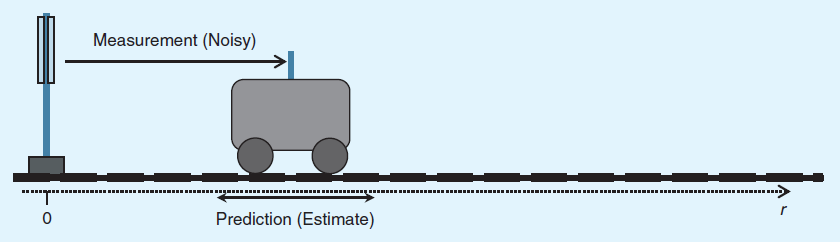

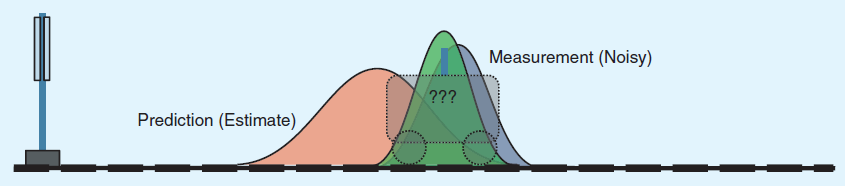
小车插图图源《Understanding the Basis of the Kalman Filter Via a Simple and Intuitive Derivation》
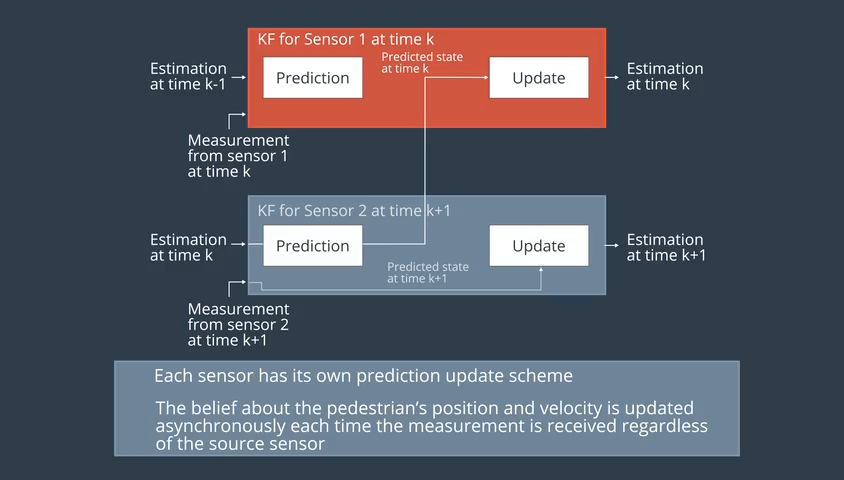
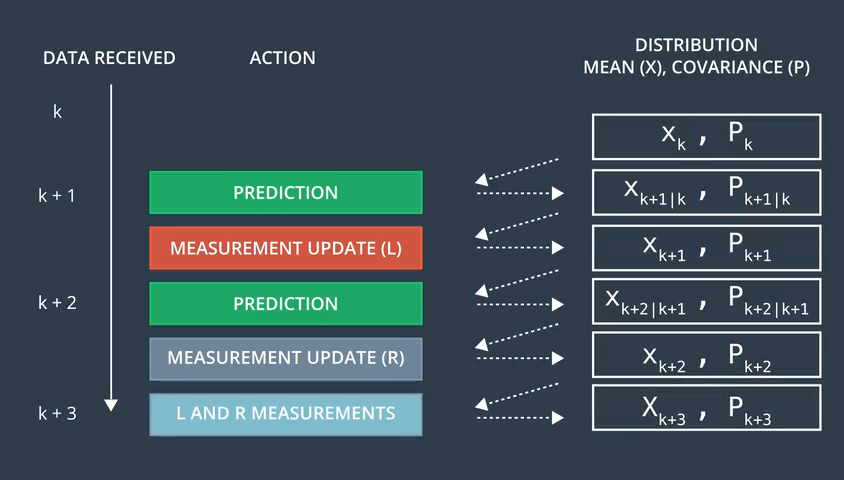
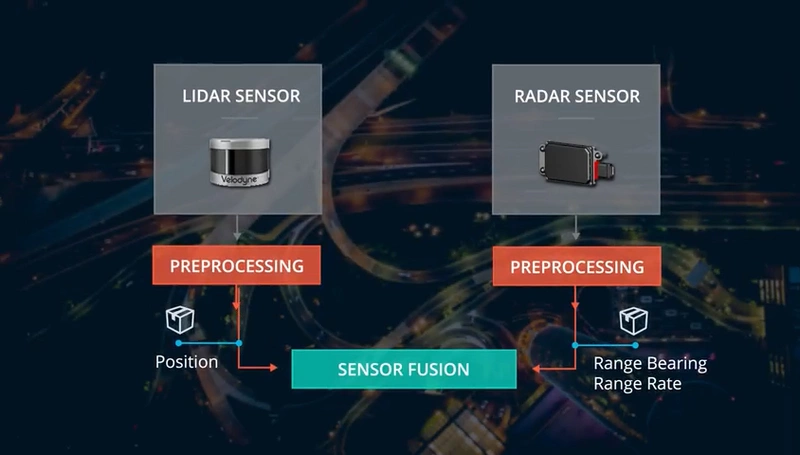
多传感融合 Lidar and Radar Fusion
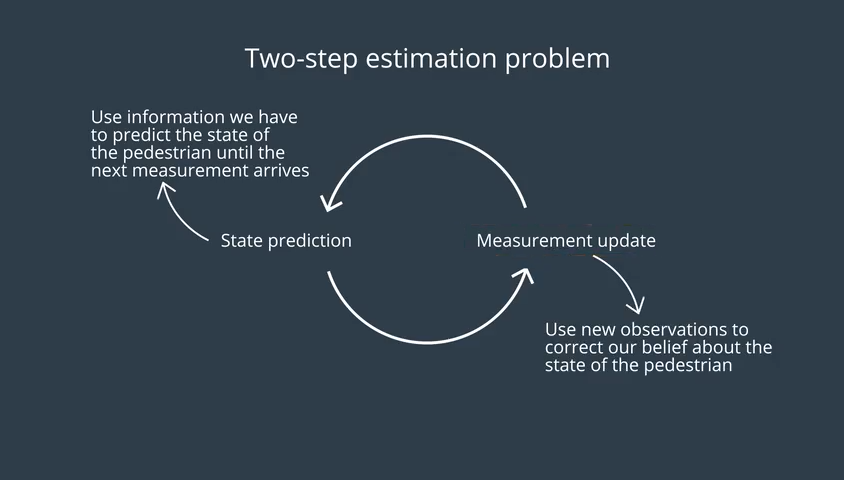
一个简单的感知反馈模型其实只有两步:状态预测与测量更新
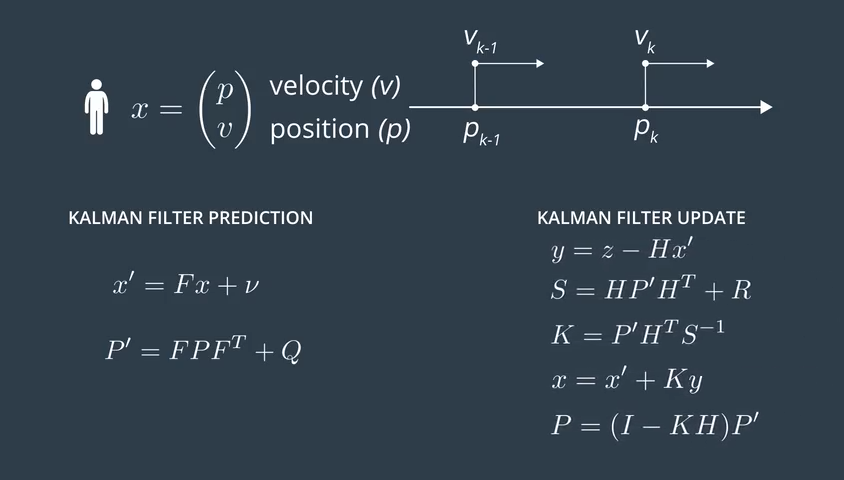
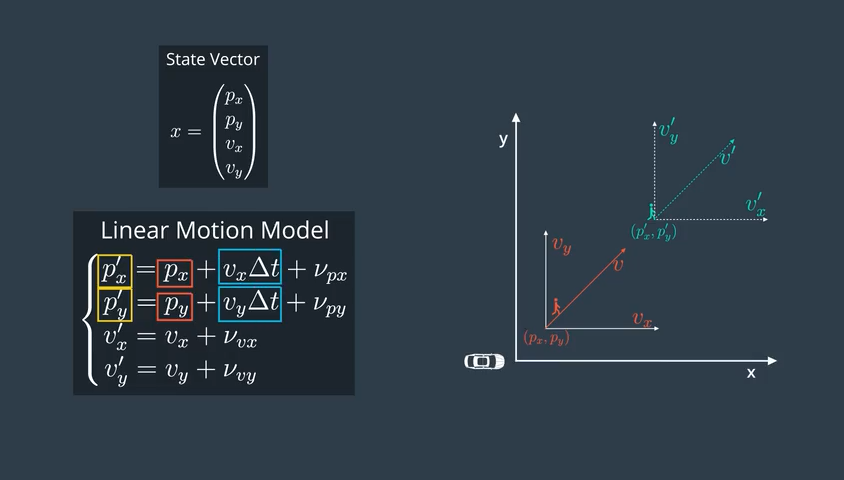
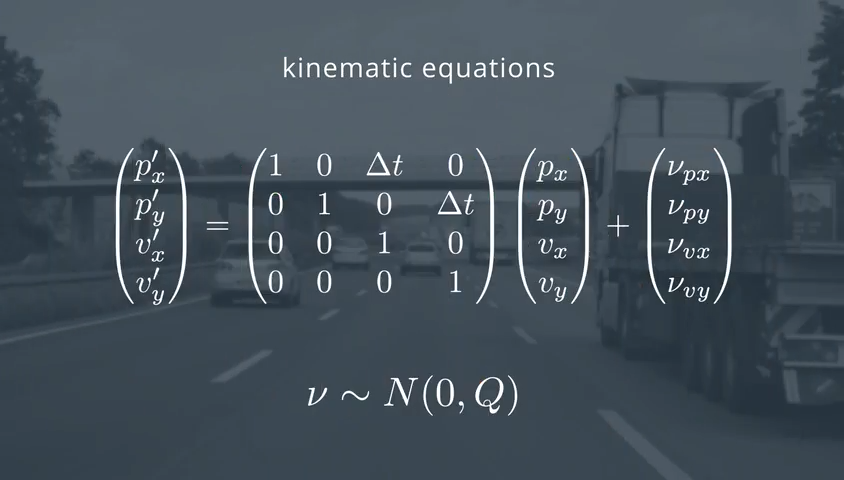
状态预测 State Prediction
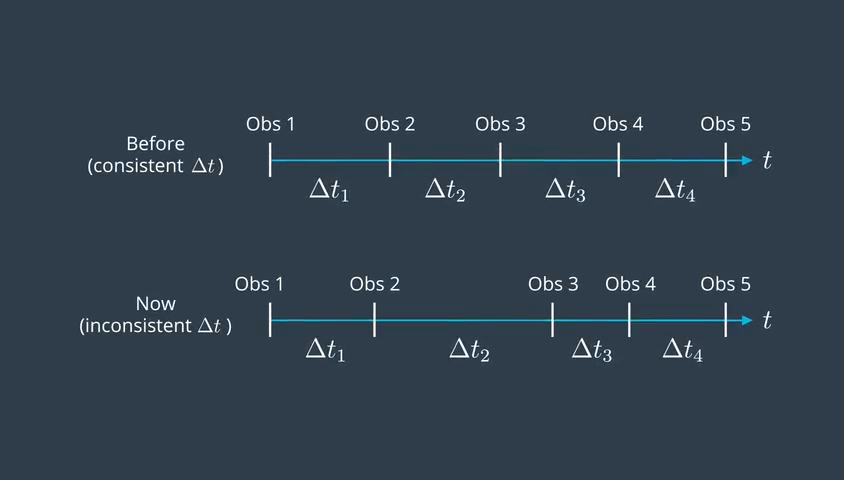
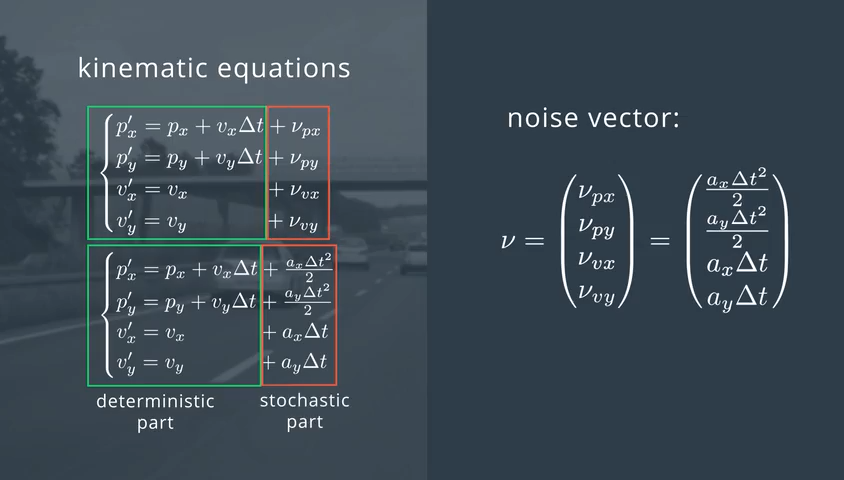
线性模型假设,物体在运动时,每段时间间隔中速度恒定。实际上,每次测量时间之间的间隔是不定的,物体的加速也是不定的
process Noise
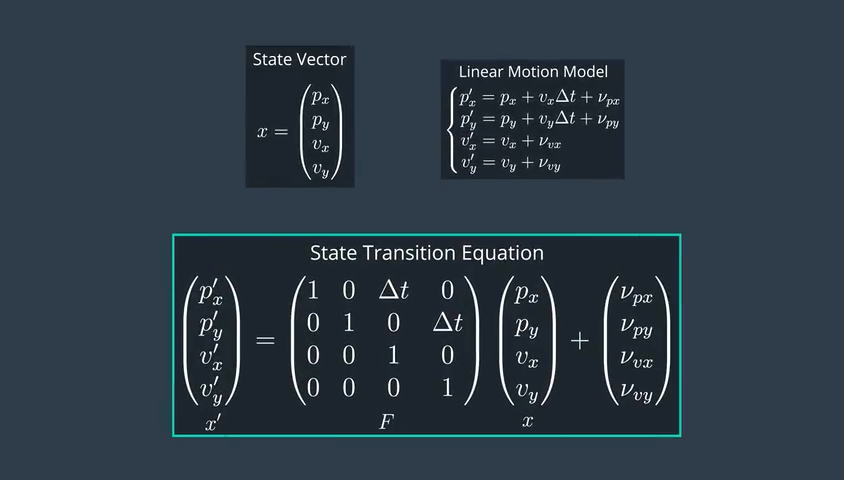
下图引入了状态转移矩阵
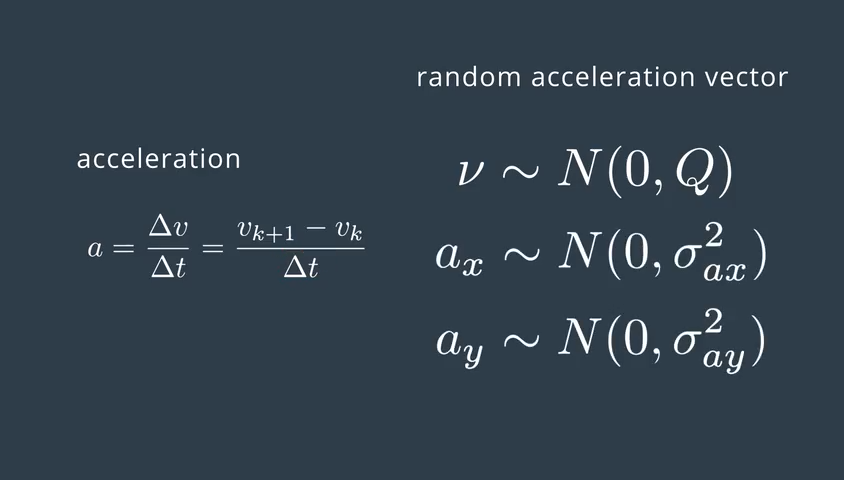
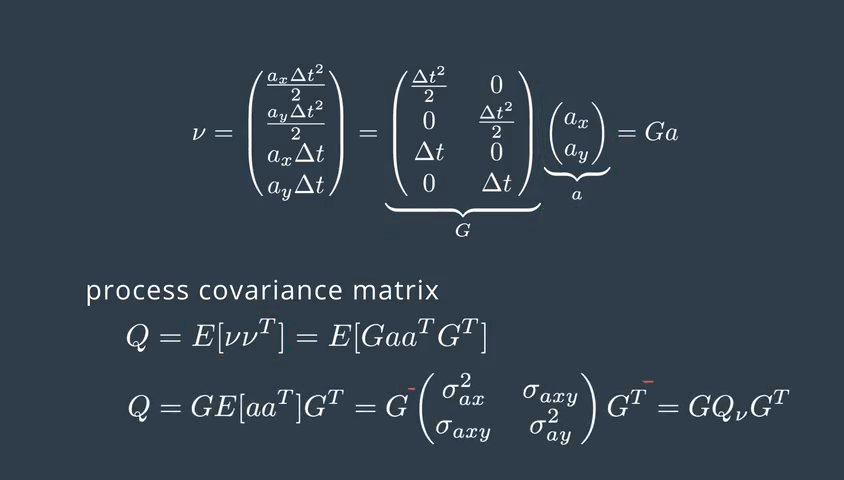
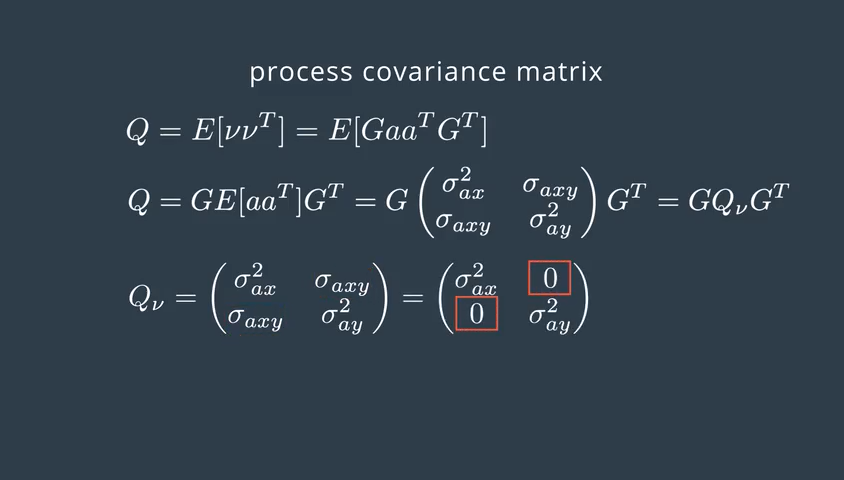
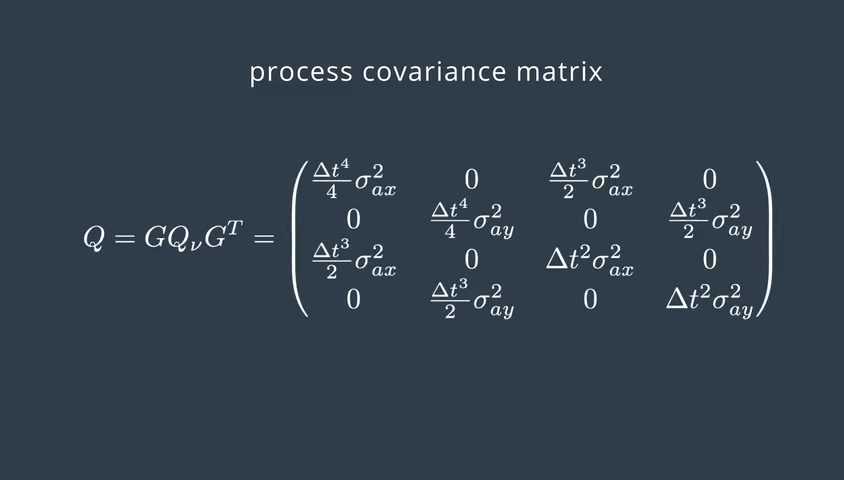
过程协方差矩阵 Process Covariance Matrix
由于状态向量只包含位置和速度信息,实际上加速度在模型中是作为随机噪声的
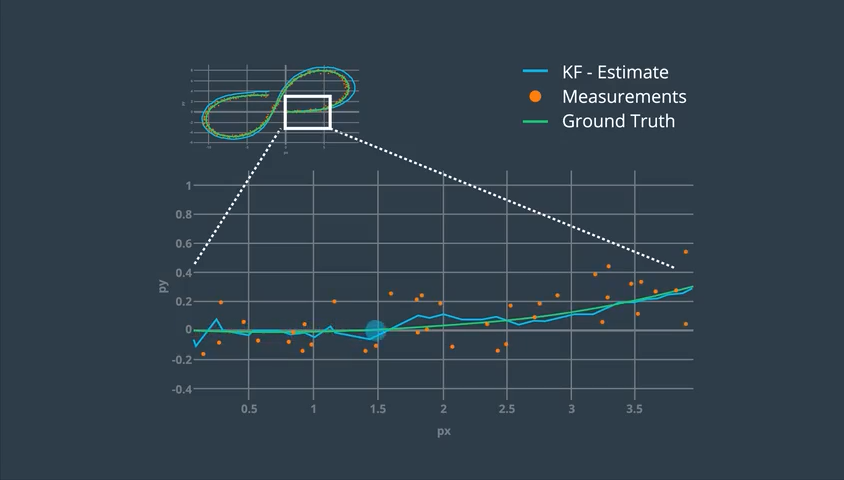
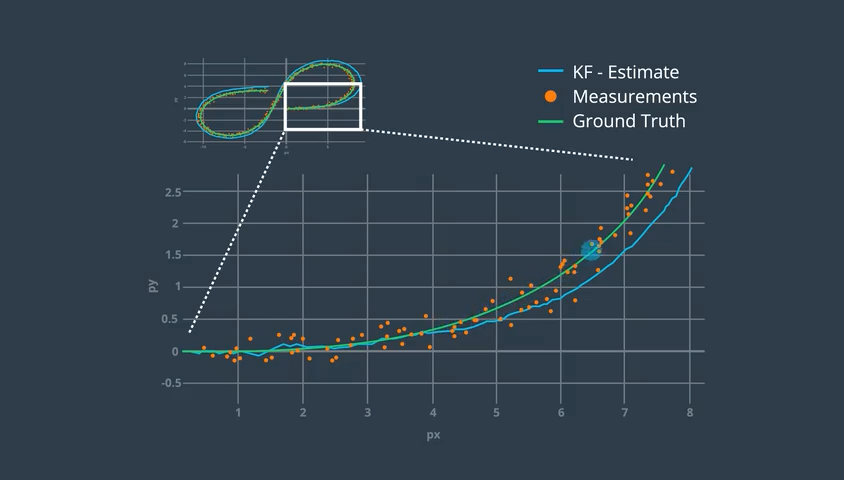
激光检测 Laser Measurement
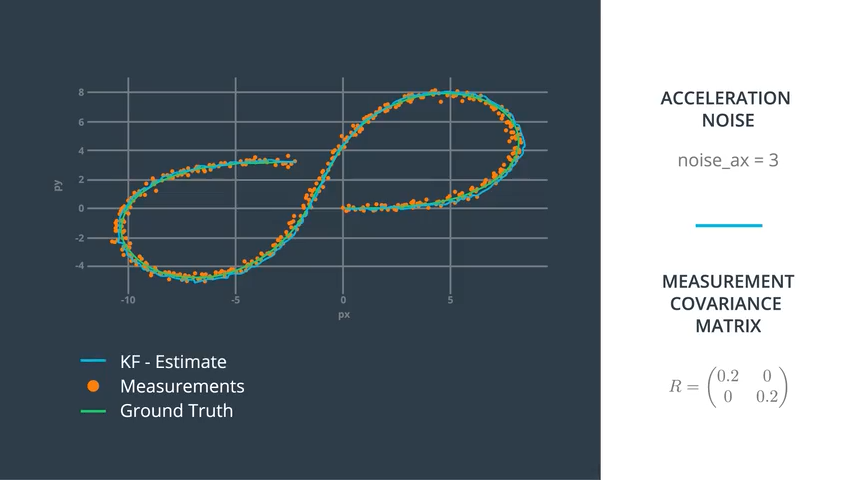
使用激光传感器,获取点云数据,探测物体。利用卡尔曼滤波进行转台预测
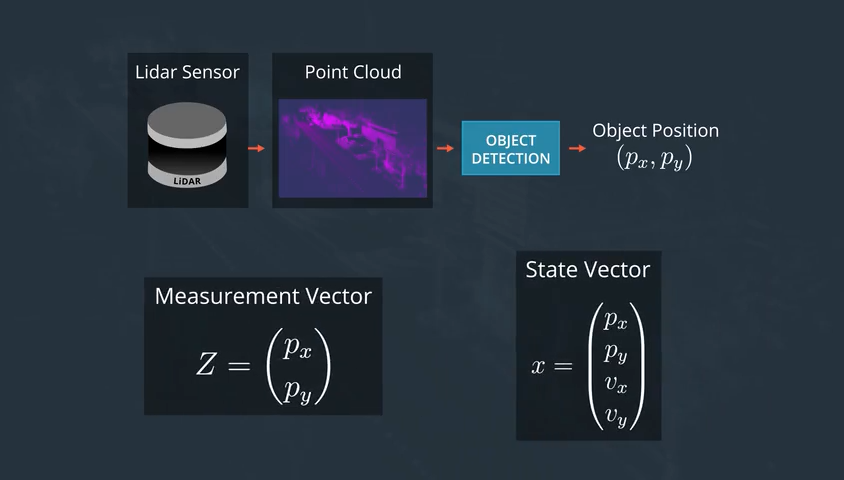
预测效果如下
雷达检测 Radar Measurement
激光可以获得车辆的位置信息,要完成传感融合还需要从雷达获取速度信息
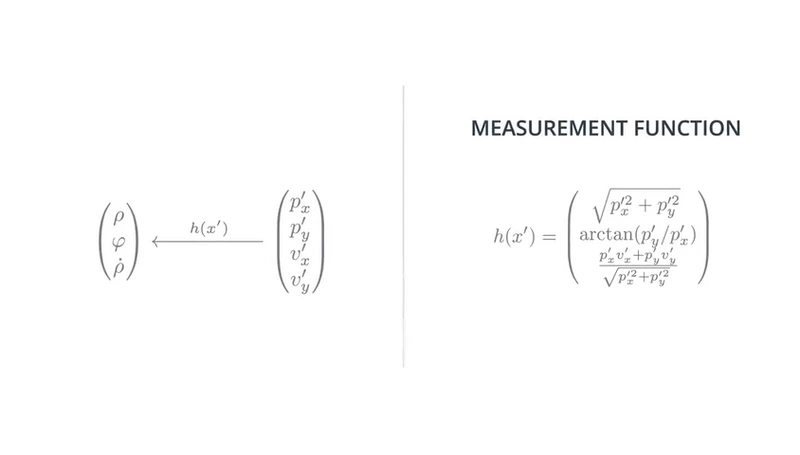
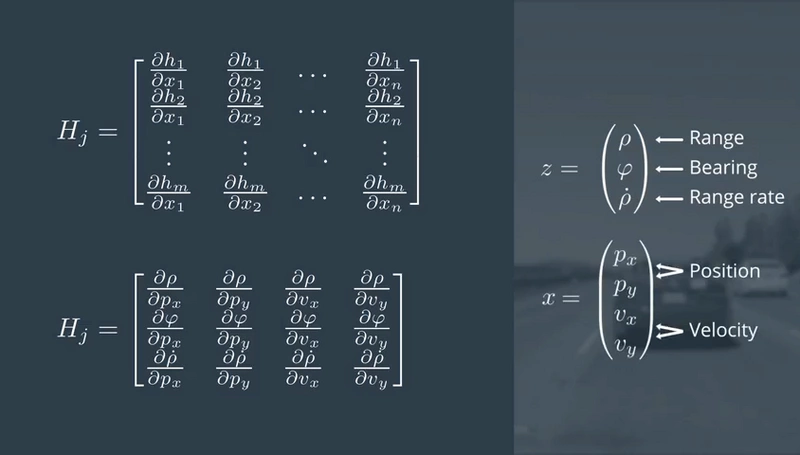
雷达信息包含了三个变量:Range范围(与路人的距离); Bearing方位(从x轴开始逆时针转向路人方向的角度); Radial Velocity是车速在行人方向上的速度分量,也叫range rate
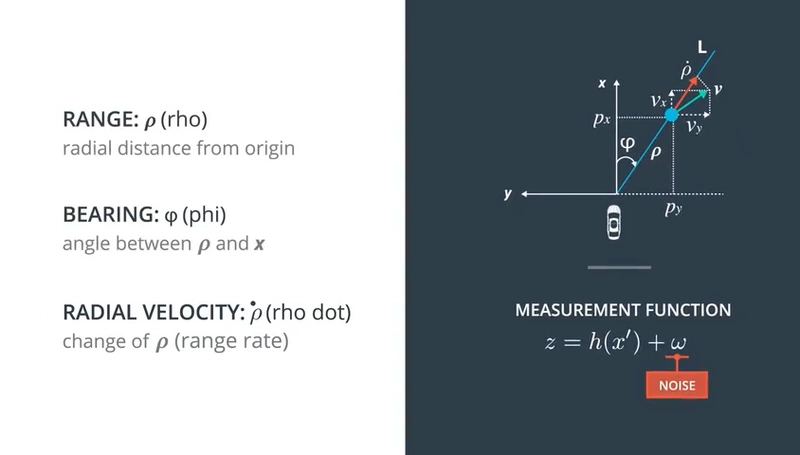
测量函数h(x')会将测量空间投射到预测空间
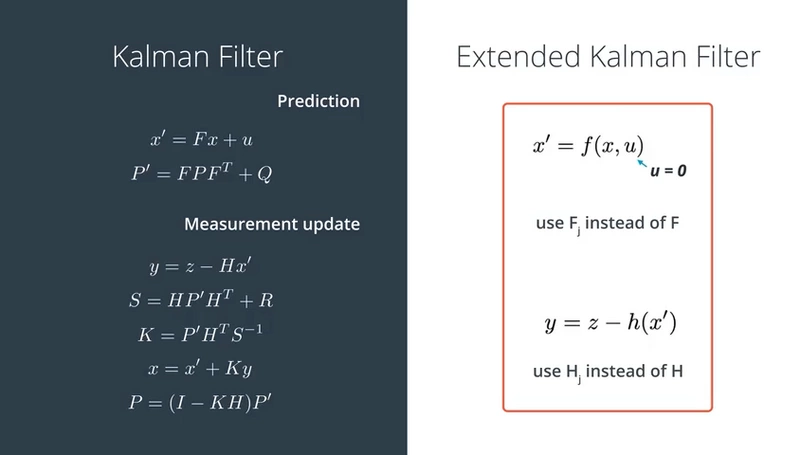
Extended Kalman Filter 扩展卡尔曼滤波
EKF(Extended Kalman Filter)是卡尔曼滤波的非线性版本。
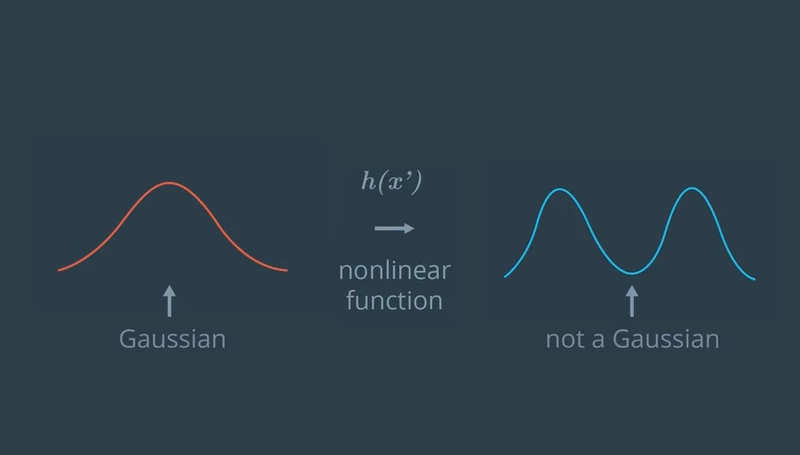
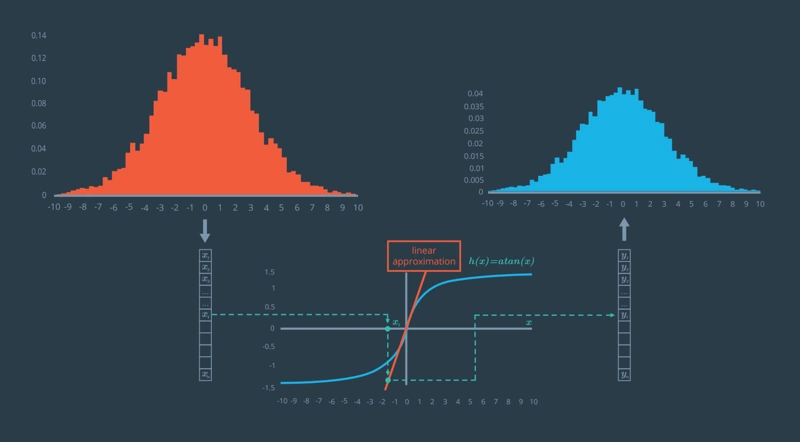
Prediction(Estimate)服从高斯分布,且Measurement(Noisy)也服从高斯分布。但是现实状态中,基本都是非线性变换(简单说就是因为现实中被测物体多半处于受力状态,比如摩擦力)。
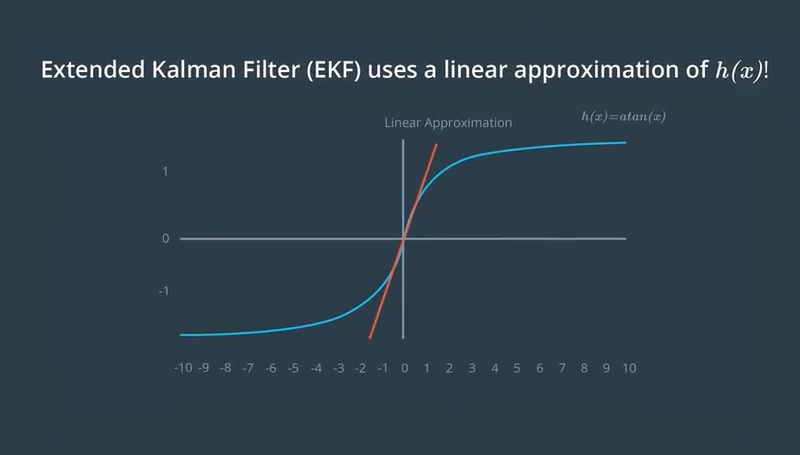
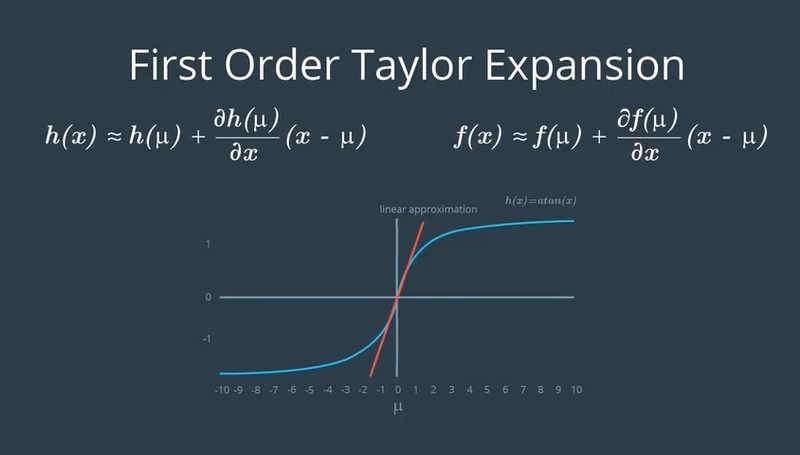
所以EKF利用一阶泰勒展开,用局部的线性系统接近整个非线性系统。
新的结果依旧服从高斯分布
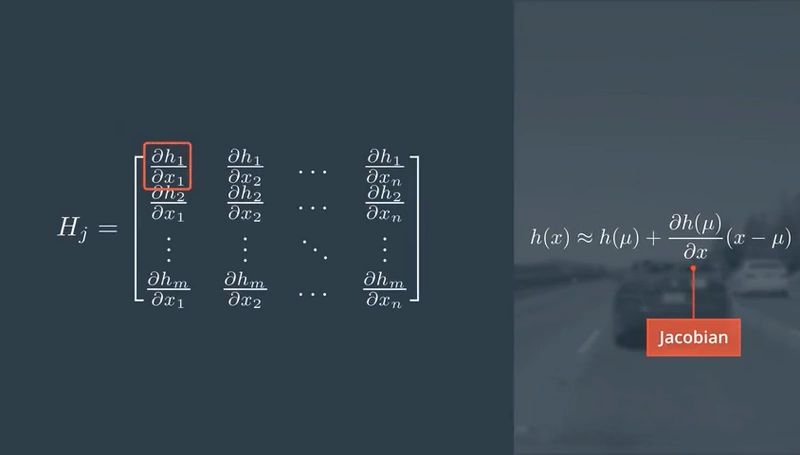
雅可比矩阵 Jacobian Matrix
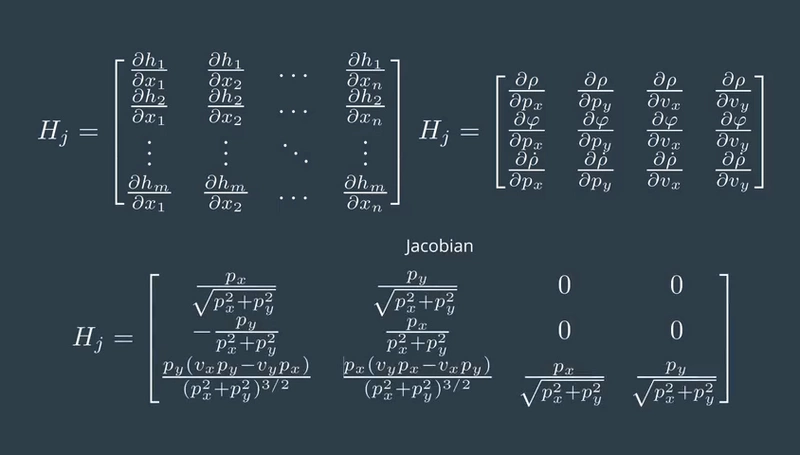
做泰勒展开的时候,需要对x求偏导,得到雅可比矩阵。
x是由4部分组成的
EKF 算法总结