

原文发表在:
holmeshe.me/understandi…Slab分配器是这个缓存系统的核心,并在很大程度上决定了核心资源 - 内存 - 的利用效率。其它的三个部分,
用来淘汰(超时)对象的LRU算法;和
基于lebevent的事件驱动;以及
用于分布数据的一致性哈希,
可以看作是围绕Slab来开发的。
这次我们继续看用于Slab的内存是如何分配的。
首先我们继续看 slabs_init 的两个实参。第一个是 settings.maxbytes - 控制这个memcached可以使用的总内存大小。在传入 slabs_init 之前,这个参数被赋值为全局变量 mem_limit 。
void slabs_init(const size_t limit, const double factor, const bool prealloc, const uint32_t *slab_sizes) {
...
mem_limit = limit; // scr: here
...
static size_t mem_limit = 0;
...
settings.maxbytes = 64 * 1024 * 1024; /* default is 64MB */
...
case 'm':
settings.maxbytes = ((size_t)atoi(optarg)) * 1024 * 1024;
break;
...
另外一个怎是 preallocate 。它决定了是否为(各个)Slab组(slab class) 预分配 内存。这个参数的值由 L 命令行参数来决定。
...
bool preallocate = false;
...
case 'L' :
if (enable_large_pages() == 0) {
preallocate = true;
} else {
fprintf(stderr, "Cannot enable large pages on this system\n"
"(There is no Linux support as of this version)\n");
return 1;
}
break;
...
下面我们来看 slabs 的内存分配函数。
New slab
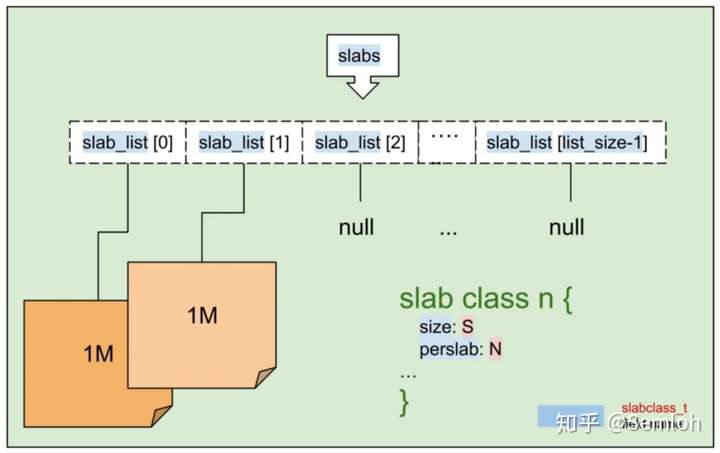
具体来说,这个函数用于给 Slab组 分配大小为1M的内存块(slab)。而 Slab组 由参数 id 指定。
static int do_slabs_newslab(const unsigned int id) {
slabclass_t *p = &slabclass[id]; // scr: ----------------------------> 1)
slabclass_t *g = &slabclass[SLAB_GLOBAL_PAGE_POOL]; // scr: ---------> *)
int len = settings.slab_reassign ? settings.item_size_max // scr: ---> 2)
: p->size * p->perslab;
char *ptr;
if ((mem_limit && mem_malloced + len > mem_limit && p->slabs > 0 // -> 3)
&& g->slabs == 0)) {
mem_limit_reached = true;
MEMCACHED_SLABS_SLABCLASS_ALLOCATE_FAILED(id);
return 0;
}
if ((grow_slab_list(id) == 0) || // scr: ----------------------------> 4)
(((ptr = get_page_from_global_pool()) == NULL) && // scr: -------> *)
((ptr = memory_allocate((size_t)len)) == 0))) { // scr: ---------> 5)
MEMCACHED_SLABS_SLABCLASS_ALLOCATE_FAILED(id);
return 0;
}
memset(ptr, 0, (size_t)len);
split_slab_page_into_freelist(ptr, id); // scr: ---------------------> 6)
p->slab_list[p->slabs++] = ptr; // scr: -----------------------------> 7)
MEMCACHED_SLABS_SLABCLASS_ALLOCATE(id);
return 1;
}
1)slabclass[id] 是 Slab组 的数据结构。上篇讨论了这个数组的初始化。
2)settings.slab_reassign 决定是否启用 再平衡 策略。如果启用,未使用的 slabs 不会被立即释放,而是分配给其他 Slab组 使用,这就产生了一个问题,即所有 Slab组 都需要使用统一大小的 slab。所以这个设置同时也决定了是否使用 同种 slab (大小为 settings.item_size_max,或者上述的1M),还是
异种slab (p->size * p->perslab)。除了用命令行参数“slab_reassign”以外,“modern”也会设置这个值,而本文也会用1M作为 slab 的大小。
3)检查内存使用是否超出上线。
4)grow_slab_list 检查是否增长 slabclass_t.slab_list,如果需要,则增长之。
static int grow_slab_list (const unsigned int id) {
slabclass_t *p = &slabclass[id];
if (p->slabs == p->list_size) {
size_t new_size = (p->list_size != 0) ? p->list_size * 2 : 16;
void *new_list = realloc(p->slab_list, new_size * sizeof(void *));
if (new_list == 0) return 0;
p->list_size = new_size;
p->slab_list = new_list;
}
return 1;
}
5)memory_allocate 是真正分配 slab 内存的函数。如上述,这里的 len 是1M。
6)split_slab_page_into_freelist 初始化 (或者是 free)刚刚分配的 slab 内存用作对象存储。这个函数会在下一节讨论。
7)将刚刚分配的 slab 加入到 slabclass_t.slab_list 。
下图总结了这个过程(我们想象 do_slabs_newslab(n) 被调用了两次)
接下来我们来看在第6)步中一块 slab 是如何被初始化的。
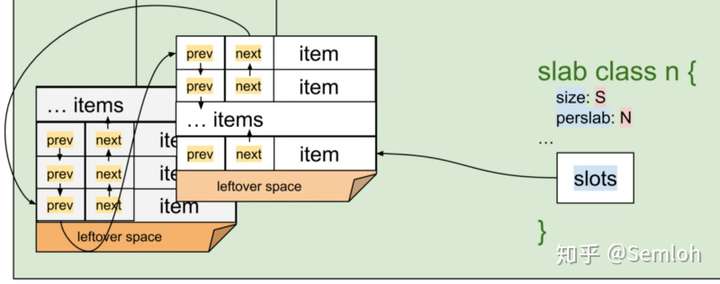
split_slab_page_into_freelist
static void split_slab_page_into_freelist(char *ptr, const unsigned int id) {
slabclass_t *p = &slabclass[id];
int x;
for (x = 0; x < p->perslab; x++) {
do_slabs_free(ptr, 0, id);
ptr += p->size;
}
}
这个函数会遍历 slab 里的所有 item 块(slabclass_t.size),然后调用 do_slabs_free 来初始化每个 item 块的元数据。换一个说法,就是 “拆分 slab到待分配列表”-“split a slab into item free list”。你也许已经猜到了,这个 待分配列表 会被直接用于 对象分配 ,这个过程后面会详细讨论。
do_slabs_free
static void do_slabs_free(void *ptr, const size_t size, unsigned int id) {
slabclass_t *p;
item *it;
...
p = &slabclass[id];
it = (item *)ptr;
it->it_flags = ITEM_SLABBED; // scr: ---------------> 1)
it->slabs_clsid = 0;
it->prev = 0; // scr: ------------------------------> 2)
it->next = p->slots;
if (it->next) it->next->prev = it;
p->slots = it;
p->sl_curr++; // scr: ------------------------------> 3)
p->requested -= size;
return;
}
技术上来说,这个函数处理的元数据存在于每个 item 块的开始。
1)初始化一些域。这里 item 是另一个核心数据结构,后续会讨论。
2)将 item 加入到上述的 待分配列表 ,并且更新链表表头,slabclass_t.slots 。
3)更新可分配项目数量,slabclass_t.sl_curr;并且更新 slabclass_t.requested 负责统计。注意这里并没有真正的释放对象,所以传入的size 是0。
Slab 预分配
下面我们来看 do_slabs_newslab 怎么使用。其中一个地方是之前看到过的 slabs_init (preallocate 设置为 true),
void slabs_init(const size_t limit, const double factor, const bool prealloc, const uint32_t *slab_sizes) {
...
if (prealloc) {
slabs_preallocate(power_largest);
}
}
static void slabs_preallocate (const unsigned int maxslabs) {
int i;
unsigned int prealloc = 0;
/* pre-allocate a 1MB slab in every size class so people don't get
confused by non-intuitive "SERVER_ERROR out of memory"
messages. this is the most common question on the mailing
list. if you really don't want this, you can rebuild without
these three lines. */
for (i = POWER_SMALLEST /* scr: 1 */; i < MAX_NUMBER_OF_SLAB_CLASSES; i++) {
if (++prealloc > maxslabs)
return;
if (do_slabs_newslab(i) == 0) {
fprintf(stderr, "Error while preallocating slab memory!\n"
"If using -L or other prealloc options, max memory must be "
"at least %d megabytes.\n", power_largest);
exit(1);
}
}
}
这个方法从POWER_SMALLEST (1)开始遍历所有的 slabclass ,然后给每个 Slab组预分配一个 slab。(下标为0的 Slab组 是一个特殊的组,存储空闲的 slab 用于上面提到的 再平衡 策略)。
References
和上文一样。
