前言
前面章节主要讲解了一些常用的变换矩阵,这一节咱们主要讲解一些视图变换和投影变换。
有些小伙伴可能不了解图形学,会有所疑惑这些矩阵有啥用,其实这都是为了后面"MVP变换"做铺垫,但是如果一上来冒然的介绍MVP,会因小失大!因此作者决定将其放在后面介绍渲染管线的时候介绍它,不要着急哦!
正文
视图变换
为什么要有视图变换?
想象一个三维场景中,各个地方的物体已经摆好了。这时候有一个好奇心宝宝,想要从不同的视角去观察,物体摆放的合不合适,那怎么办呢?
答:需要引入类似"摄像机"的概念,就像现实中一样,摄像师扛着摄像机跑,从而拍到了不同的画面,虚拟的三维场景也是一样!为此引入视图变换,来满足虚拟摄像机的需求!
视图变换是什么?
本质上,它和前面章节提到的旋转变换、平移变换类似,最终结果呈现也就是一个矩阵的表达式罢了。
视图变换如何定义?
定义摄像机:
让我们思考一个问题,如果我们是摄影师,需要某漂亮国的一处景点,摄像机需要有哪些属性呢?
答:摄像机的位置、摄像机镜头朝向、摄像机顶部朝向等等。
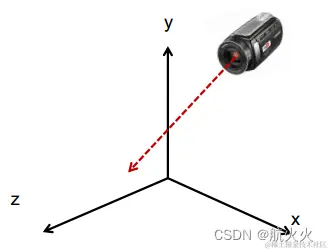
人都是懒的,如果在三维空间中为了方便显示在二维中,最简单的摄像机如下所示:
摄像机相关属性:
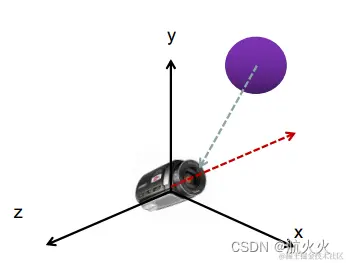
此时这种情况,所有物体都可以直接沿着z轴投射到摄像机的屏幕中,非常方便!
但是往往事与愿违,如果摄像机变化到下述的形态,就不方便直接按照z轴投射了!
所以,我们就需要达成一个目标:将摄像机恢复到原点,并且镜头朝向-z轴!
摄像机变换:
这个问题如何思考呢?其实我们可以逆过程思考,我们可以想一想:原本在原点并看向-z轴的一台摄像机,是如何变化到上述情况的!
然后咱们上述目标的达成也就是应用此过程的逆变换!
正向过程变换示意图如下:
1、摄像机先绕原点旋转
2、摄像机进行平移
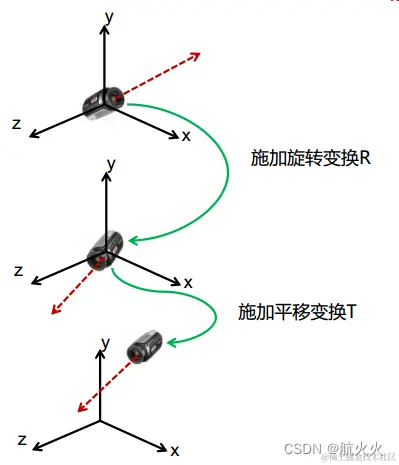
自之前章节的学习,我们知道,这个过程也就可以表述为:先旋转变换,再平移变换。公式如下:
M=T∗R注:R为旋转矩阵,T为平移矩阵
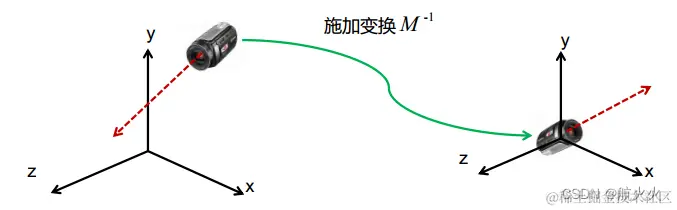
上述的逆变换也就显而易见:
M−1=R−1∗T−1
所以,只要应用此变换,就可以实现将任意位置和朝向的摄像机,变换到位于原点并看向-z轴的情形!如下示意图:
目标重申:
既然我们要求场景的物体和摄像机保持相对静止,那么只需要针对所有物体进行上述的变换,不就实现了咱们的目标么!Successfully!
构建矩阵:
为了方便,咱们定义摄像机朝向为:front 向量,简称f ;摄像机顶部向量为 u ,以及一个摄像机的 right 向量,简称: r ,示意图如下:
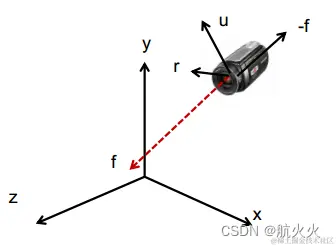
既然咱们已经知道了新的坐标系的三个基向量r、u、−f ,分别对应于心坐标系的x、y、z轴,所以咱们自然而然就知道了旋转矩阵 R,如下:
R=rxryrz0uxuyuz0−fx−fy−fz00001
所以咱们可以自然而然得到R的逆矩阵,如下:
R−1=rxux−fx0ryuy−fy0rzuz−fz00001
我们假设摄像机的位置位于:P=(px,py,pz) ,则可以构建一下的平移矩阵及其逆矩阵:
T=100001000010pxpypz1
T−1=100001000010−px−py−pz1
根据之前的结论,视图变换矩阵为:M−1=R−1∗T−1,因此如下:
M−1=rxux−fx0ryuy−fy0rzuz−fz00001∗100001000010−px−py−pz1=rxux−fx0ryuy−fy0rzuz−fz0−r⋅p−u⋅pf⋅p1
总结: 为了灵活的从摄像机视角观察物体,并且方便按照z轴投射,咱们只需要针对三维场景的物体应用上述的变换矩阵即可!
投影变换
1、正交投影
正交投影是什么?
它是一种平行投影,用于将三维空间场景映射到2D的平面上。直观上理解,有点类似截面图或者压扁了的感觉!所以它本质上没有所谓的近大远小的特点。如图所示
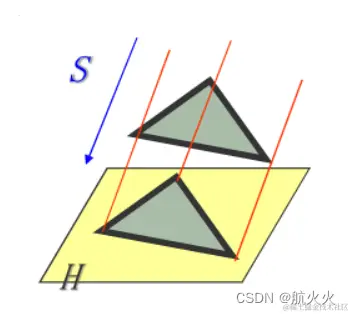
它常常应用于CAD制图等领域!
为什么需要正交投影?
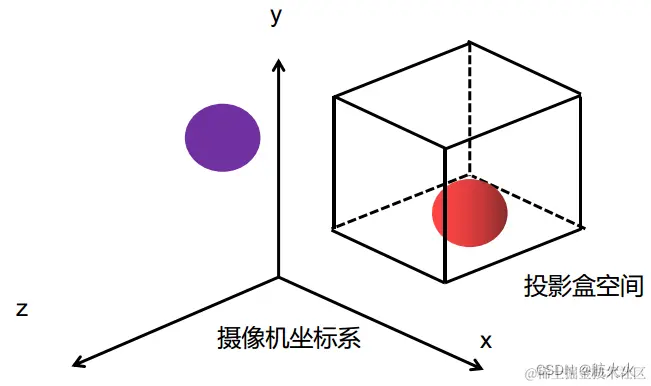
1、实际上,在三维场景中,我们的物体范围可能非常大,但是咱们屏幕空间是有限的,所以为了关注特别需要的区域,需要定义一个类似包围盒体的东西,盒体的需要显示,盒体外的咱们不需要显示
2、为了规范化坐标为NDC坐标,方便后续在屏幕中显示
NDC坐标,其实就是一个x、y、z都在 [-1,1] 范围内的规范化的坐标!
如图所示:
正交投影矩阵是啥?
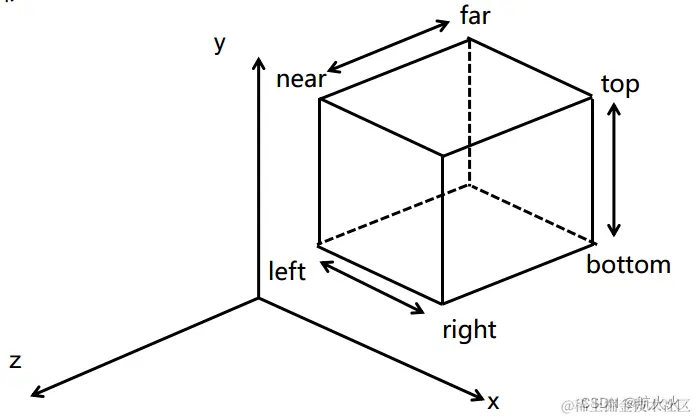
(1)约定以下都在视图变换后的摄像机坐标系下定义。
一个立方体包围盒,也就是上、下、左、右、前、后这几个属性定义而成,如图所示:
(2)为了达到NDC坐标的 [−1,1]3 的要求,我们需要规范两件事情:
- 盒体中心规范到原点
- 盒体长度缩放至2X2X2的标准长度
因此,上述操作也就对应两个变换矩阵,先平移到中心,再进行缩放。
我们定义包围盒体的x范围:[l,r],y范围:[b,t],z范围:[n,f],因而我们得出以下平移矩阵和缩放矩阵:
T=111000000000−2r+l−2t+b−2n+f1
S=r−l20000t−b20000f−n200001
从而我们得到正交投影变换矩阵:Ortho=S∗T
Ortho=r−l20000t−b20000f−n20−r−lr+l−t−bt+b−f−nn+f1
2、透视投影
为什么需要透视投影?
上面的正交投影已经说过,它最大的缺点就是没有近大远小的特性,但是在现实中如果没有这样的特性,几乎三维场景就是非常"假"的一个状态。
因此,为了能够体现近大远小的特性,又发明了透视投影这一说。有点类似于素描的“透视”的概念!
透视投影是什么?
视线从摄像机触发,看向-z轴方向,可视范围为near到far的一个视锥体。最终所有物体都达到近平面near上!如下图所示:
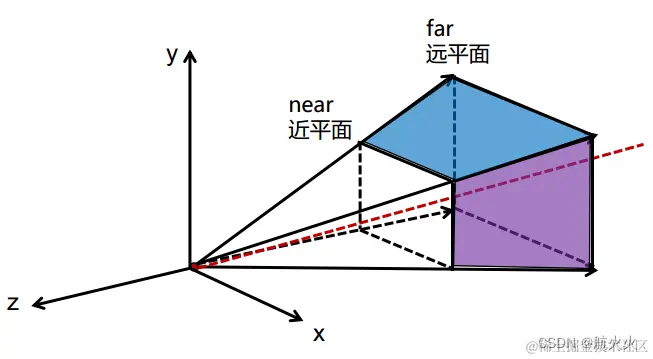
如何定义透视投影变换?
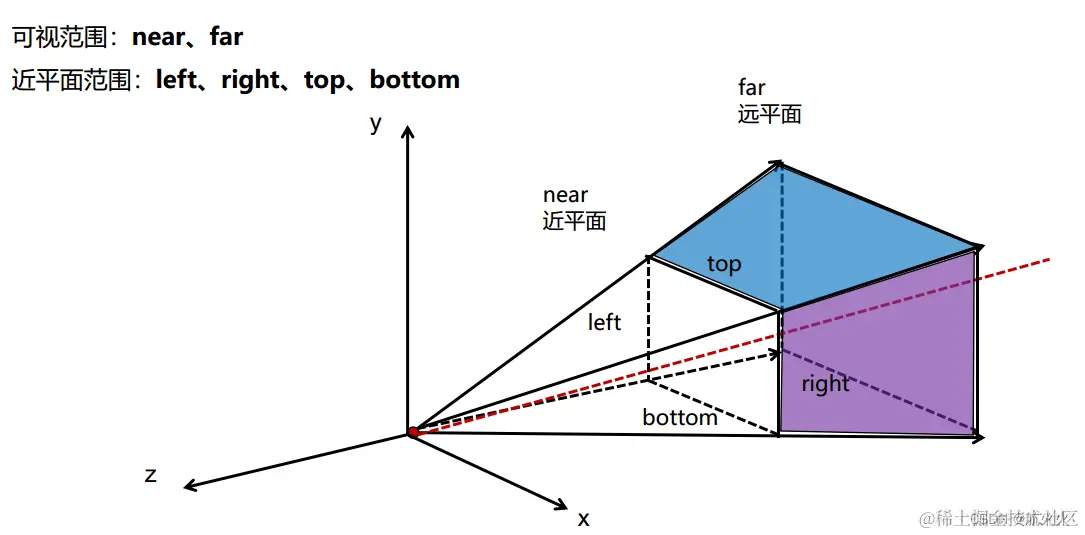
既然知道最终所有物体都投射到近平面上,因此我们将增加几个近平面的属性,完善一下上述的示意图:
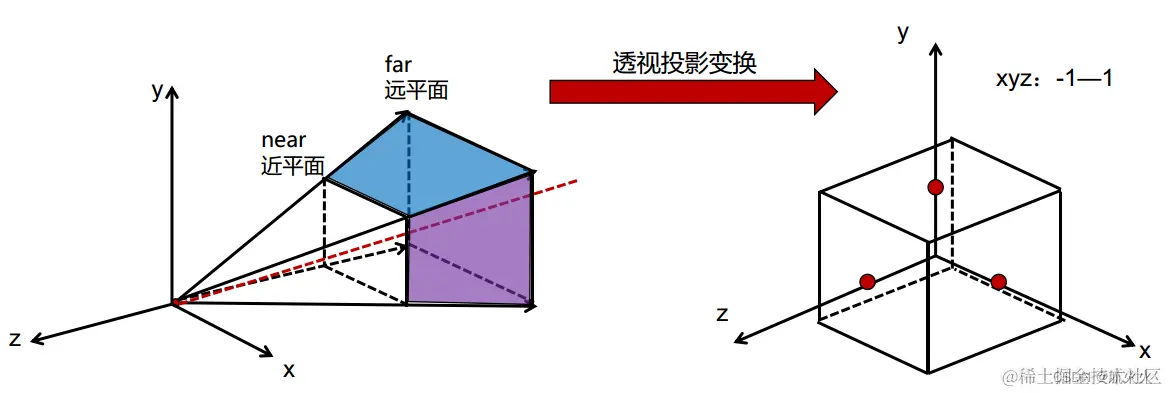
**重新定义以下透视投影变换最终目的:**将视锥体内的物体坐标变换至xyz都为[-1,1]的标准NDC坐标,如下图所示:
开始推导投影变换矩阵:
(1)基本思路:
- 因为我们无法直接对矩阵得知,我们需要从投影前后的坐标关系进行反推矩阵
- 又因为最终坐标是达到近平面上得,所以以此作为突破口
(2)咱们逆y轴进行俯视观察上述示意图,得到下面得截面图:
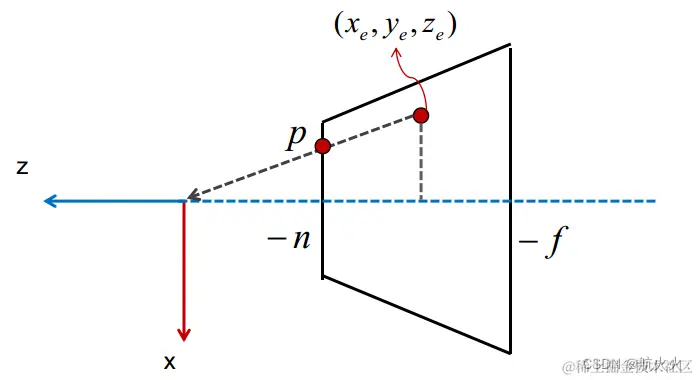
假设某一个摄像机坐标系下得坐标为 (xe,ye,ze) ,它投影到进平面后,得到 p=(xp,yp,zp) ,根据相似三角形可以得到如下等式:
xexp=ze−n
从而咱们得到投影到近平面上点的x坐标:xp=−zenxe
(3)类似的,咱们逆x轴进行观察,得到下面得截面图:

也可以类似得到进平面上的y坐标:yp=−zenye
有人可能发现了,这里的z_e不能为0,因为它在分母上,这个问题马上后面就会处理掉,大家不要着急!
(4)目前已得到投影到进平面上点的坐标,接下来要对其进行缩放到标准的[-1,1]的NDC坐标内
这里以y坐标为例,因为近平面是和z=0的平面平行关系,所以他们的缩放也必定是线性关系,如下示意图:

已知两点(t,1),(b,−1), 因此咱们可以计算出 yp和yndc 关系如下:
yndc=t−b2yp−t−bt+b
同理可以得到 xp和xndc 的关系,如下:
xndc=r−l2yp−r−lr+l
这里我们根据之前求的 yp和ye的关系、xp和xe的关系,进行等式替换,得到如下:
当xndcze=0时=r−l2yp−r−lr+l=r−l2∗−zenxe−r−lr+l=−ze1(r−l2nxe+r−lr+lze)
同理,得到:
当yndcze=0时=r−l2yp−r−lr+l=r−l2∗−zenxe−r−lr+l=−ze1(t−b2nye+t−bt+bye)
于是我们得到了xndc和yndc的坐标表示,但是此时zndc 还未知,并且上述也不能兼容ze==0的情况,所以咱们继续扩充知识
(5)利用齐次坐标,引入剪裁空间
既然上述由于除法的存在,导致分母为0的情况需要特殊考虑,人总是懒惰的,既然如此,有没有兼容=0的考虑方法呢?
答: 有的,那就将分母给去掉,只需要乘−ze即可
咱们因此剪裁空间的概念,由于剪裁的英文为clip,所以咱们定义如下:
pc(x)pc(y)pc(z)pc(w)=xndc∗(−ze)=r−l2nxe+r−lr+lze=yndc∗(−ze)=t−b2nye+t−bt+bze= ?=−ze
(6)已经考虑的差不多了,回归本源,开始利用坐标前后关系进行反推投影变换矩阵
这里先从 pc(w)=−ze 作为突破口,我们可以得到如下的关系:
xcyczcwc=???0???0???−1???0xeyezewe
然后再利用x、y坐标的前后关系,可以补齐前两行:
xcyczcwc=r−l2n0?00t−b2n?0r−lr+lt−bt+b?−100?0xeyezewe
(7)此时只剩跟z坐标相关的第三行的矩阵元素未知,需要回忆回忆额外的条件才行
我们知道,原本位于近平面上的坐标,无论x、y取什么值,它的坐标ze=−n 是一直成立的,也就是说与xy无关,所以咱们可以补充第三行的前两个参数,并且设后两个为A和B
xcyczcwc=r−l2n0000t−b2n00r−lr+lt−bt+bA−100B0xeyezewe
既然我们知道任意的近平面上的点的z值,最终映射到ndc坐标空间都是-1;远平面上的点的z值,映射到ndc坐标上都是1,于是我们得到以下两个条件:
当ze=−n,we=1时=>zndc=−1=>zc=−ze∗zndc=−n当ze=−f,we=1时=>zndc=1=>zc=−ze∗zndc=f
咱们可以用待定系数法, 代入得到以下等式:
A∗(−n)+B=−nA∗(−f)+B=f
然后咱们解个二元一次方程组,即可得到:
A=−f−nf+nB=f−n−2fn
于是咱们得到最终的投影变换矩阵,如下:
Perspective=r−l2n0000t−b2n00r−lr+lt−bt+b−f−nf+n−100f−n−2fn0
透视投影矩阵的工程化(参数变换)
上面我们已经知道了,构造透视投影矩阵需要以下已知参数:
但是,在实际工程中,这样的参数设置是比较麻烦的,所以咱们引入两个新的概念:
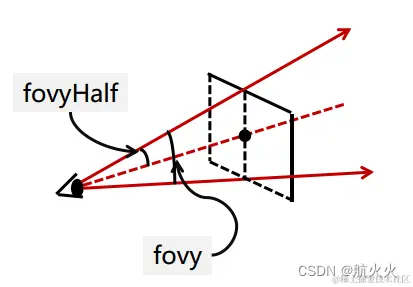
- y方向上的视张角fovy
- 近平面的纵横比aspect
额外补充条件:并且要求近平面相对y轴左右对称,相对x轴上下对称,如下图所示:
咱们进行如下的参数替换:
因而可以推导出矩阵的所有元素替换,得到如下的最终结果:
Perspective=aspect∗tan(fovy/2)10000tan(fovy/2)10000−f−nf+n−100f−n−2fn0
总结: 不管是透视投影还是正交投影,最终的目的都是讲摄像机坐标系下的坐标,最终变换到NDC坐标系下!
结尾:喜欢的小伙伴点点关注+赞哦!
你们的点赞就是我创作的最大动力!希望对各位小伙伴能够有所帮助哦,永远在学习的道路上伴你而行, 我是航火火,火一般的男人!


