上篇文章讲解了矩阵,利用矩阵我们可以轻松实现旋转、缩放等 3D 变换。另外在之前的一篇 CSS3 transform 和 canvas 背后不为人知的秘密 文章中详细讲解了平移、缩放、错切、旋转等 2D 变换,建议先看完这篇文章,这篇文章会基于这篇文章继续讲解 3D 变换不会从头再讲一遍。
组合变换和逆变换
在 CSS3 transform 和 canvas 背后不为人知的秘密 文章的最后介绍了这些 2D 变换如何用矩阵形式表示,可能有同学要问了,为啥非要用矩阵来表示这些变换,之前不挺好的吗?
这是因为用矩阵来实现,我们就可以利用矩阵的特性,实现非常强大的功能,比如我们可以将多个矩阵组合为一个单一矩阵,这个单一矩阵包含了所有的变换。
比如我们将一位置应用两个变换 A 和 B 矩阵。我们让 (B * A) 等于 C 矩阵。
newPosition = B * (A * position)
= (B * A) * position
= C * position
我们利用矩阵乘法可结合的性质,将 A 变换和 B 变换组合成了 C 变换。这样只用将位置乘上这个 C 矩阵就行了。我们可以拿这个 C 矩阵对其他点进行同样的变换了,而不需要每个点都重新计算下 B * A。
需要注意,我们首先是应用的 A 变换,然后再是 B 变换。但是由于我们使用的是列矢量,所以是 B * A * position,B 在 A 的前面。
例如,下面 A 是旋转变换,B 是平移变换。
C=B∗A=⎣⎡100010dxdy1⎦⎤⎣⎡cos(θ)sin(θ)0−sin(θ)cos(θ)0001⎦⎤=⎣⎡cos(θ)sin(θ)0−sin(θ)cos(θ)0dxdy1⎦⎤
可以发现,C 矩阵是将旋转和平移组合起来,最右那一列是平移部分。也就是我们可以将一个矩阵变成线性变换部分和平移部分。
逆变换
使用矩阵的另一个好处是可以对一个变换做它的逆变换,用于撤销原始变换。比如向右旋转 90 度,那么它的逆变换就是向左旋转 90 度。
F−1(F(a))=F(F−1(a))=a
对一个映射 F 是可逆的需要存在一个逆运算 F−1 ,满足上方式子。
我们可以发现上方介绍的变换都是可逆的,例如平移变换。
matrix=⎣⎡100010dxdy1⎦⎤
invertMatrix=⎣⎡100010−dx−dy1⎦⎤
将它平移部分变为负的即可。
绕中心旋转
我们还可以利用矩阵的特性推算出绕中心旋转矩阵。旋转一个物体时,一般希望绕它的中心旋转,而不是其他地方。要实现这个效果,我们可以对物体进行三次变换。
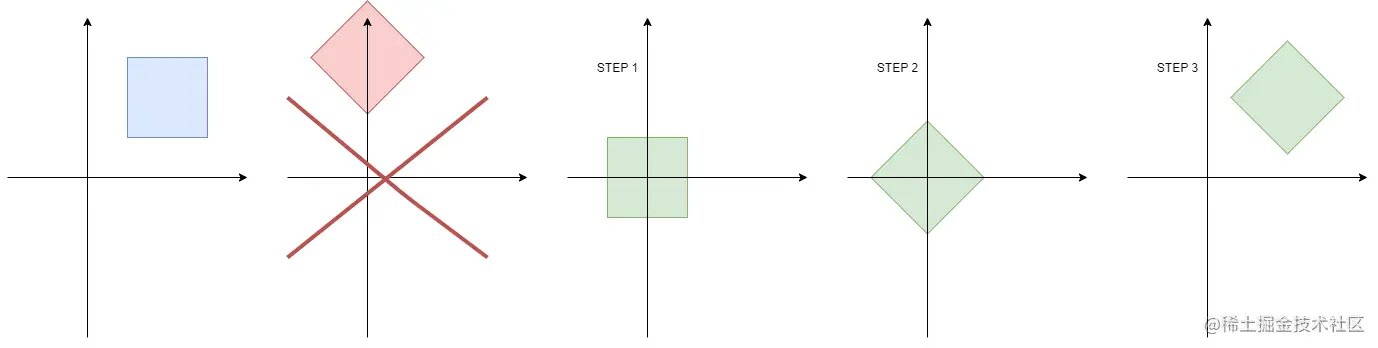
- 首先我们可以用平移矩阵 T 将物体移动到原点。
- 再使用旋转矩阵 R 旋转物体
- 最后使用第一次平移矩阵的逆矩阵 T−1 将物体移回原处
T=⎣⎡100010−dx−dy1⎦⎤
R=⎣⎡cos(θ)sin(θ)0−sin(θ)cos(θ)0001⎦⎤
T−1=⎣⎡100010dxdy1⎦⎤
根据上方旋转和平移中得出的矩阵 T−1∗R 等于。
⎣⎡cos(θ)sin(θ)0−sin(θ)cos(θ)0dxdy1⎦⎤
我们将这些矩阵组合起来。
M=T−1∗R∗T=⎣⎡cos(θ)sin(θ)0−sin(θ)cos(θ)0−dx∗cos(θ)+dy∗sin(θ)+dx−dx∗sin(θ)−dy∗cos(θ)+dy1⎦⎤
这样我们就得到了一个绕中心旋转矩阵,任何图形应用这个矩阵都可以实现绕中心旋转。
3D 平移矩阵
3D 平移矩阵和 2D 一样,这里不做过多介绍
⎣⎡100001000010dxdydz1⎦⎤
缩放矩阵
3D 缩放矩阵也和 2D 的一样,这里也不做过多介绍。
⎣⎡sx0000sy0000sz00001⎦⎤
任意方向缩放
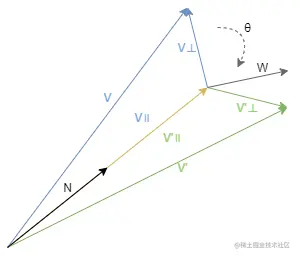
除了 X,Y,Z 轴方向,我们还可以实现任意方向缩放。假设我们任意方向是单位矢量 N。

上图中将矢量 V ,沿着单位矢量 N 进行缩放,缩放比例为 k,得到矢量 V′ 。
将矢量 V 分解为 V∥ 和 V⊥ ,使得 V∥ 平行 N , V⊥ 垂直于 V∥ ,并且 V=V∥+V⊥ 。同样的将 V′ 也分为 V′∥ 和 V′⊥ 。
由于 V⊥ 垂直 N ,所以它不会受到缩放操作影响,对 V 的缩放也就是对 V∥ 的缩放。
我们可以发现 V∥ 等于 (V⋅N)∗N,那么变换后 V′ 就为。
V=V∥+V⊥
V∥=(V⋅N)∗N
V′⊥=V⊥=V−V∥=V−(V⋅N)∗N
V′∥=kV∥=k∗(V⋅N)∗N
V′=V′⊥+V′∥=V−(V⋅N)∗N+k∗(V⋅N)∗N=V+(k−1)∗(V⋅N)∗N
求出了 V′ ,我们就可以得到在任意单位矢量 N 方向,缩放 k 的缩放矩阵。
⎣⎡1+(k−1)Nx2(k−1)NxNy(k−1)NxNz0(k−1)NxNy1+(k−1)Ny2(k−1)NyNz0(k−1)NxNz(k−1)NxNz1+(k−1)Nz200001⎦⎤
旋转矩阵
对于三维旋转,我们可以绕 X、Y 和 Z 轴旋转,每个旋转对应一个旋转矩阵。
我们还需要确认哪个方向是旋转正方向,我们这里用之前文章中提到的右手坐标系。
绕 X 轴旋转,X 轴坐标不变。
Rx=⎣⎡10000cos(θ)sin(θ)00−sin(θ)cos(θ)00001⎦⎤
绕 Y 轴旋转,Y 轴坐标不变。
Ry=⎣⎡cos(θ)0−sin(θ)00100sin(θ)0cos(θ)00001⎦⎤
绕 Z 轴旋转,Z 轴坐标不变。
Rz=⎣⎡cos(θ)sin(θ)00−sin(θ)cos(θ)0000100001⎦⎤
我们可以看到 3D 旋转矩阵其实和 2D 差不多,另外旋转矩阵是正交矩阵,它的逆矩阵就等于它的转置矩阵(求矩阵的逆矩阵是性能开销比较大的运算,利用旋转矩阵的这个特性可以节省大量性能开销)。
根据上面公式我们可以写出公式对应的 JS 代码。
class Mat4 {
static fromXRotation(rad) {
const s = Math.sin(rad)
const c = Math.cos(rad)
return [
1, 0, 0, 0,
0, c, s, 0,
0, -s, c, 0,
0, 0, 0, 1
]
}
static fromYRotation(rad) {
const s = Math.sin(rad)
const c = Math.cos(rad)
return [
c, 0, -s, 0,
0, 1, 0, 0,
s, 0, c, 0,
0, 0, 0, 1
]
}
static fromZRotation(rad) {
const s = Math.sin(rad)
const c = Math.cos(rad)
return [
c, s, 0, 0,
-s, c, 0, 0,
0, 0, 1, 0,
0, 0, 0, 1
]
}
}
在之前的 零基础玩转 WebGL - 着色器 文章的中我们利用 WebGL 渲染了一个立方体,但是看起来却像个正方形,这是因为它没有转起来,我们只能看得见它的正面所以看起来像个正方体。现在我们学会了旋转矩阵是时候让它旋转起来了。
code.juejin.cn/pen/7168479…
我们可以看到立方体旋转起来了,但是可能这个立方体看起来有一点点奇怪,这是因为还没有作透视处理,透视处理同样是利用矩阵来实现,透视将在下篇文章讲解。
绕任意过原点轴旋转
除了绕 X、Y、Z 轴,还可以绕任意轴旋转(该轴穿过原点,不考虑位移的情况)。假设绕任意轴单位矢量 N。
和任意方向缩放中一样,上图中 V′ 是矢量 V 沿单位矢量 N 旋转 θ 度后的结果。要求出 V′ 的位置,我们可以将 V 和 V′ 拆分成垂直和平行分量,其中平行分量平行于 N 。
我们可以发现旋转是应用在垂直分量上的,因为平行分量于旋转方向 N 平行,不受旋转影响。我们现在可以把目标放在 2 维平面上的垂直矢量 V⊥ 和 V′⊥ 。
我们可以构造一个 W 矢量, W 垂直 V⊥ ,长度于 V⊥ 相等。 W 矢量等于 N 叉乘 V⊥ (叉乘在矢量中有讲)。
W、 V⊥ 、 V′⊥ 都在一个平面上,并且 W 与 V⊥ 垂直,我们把 W 和 V⊥ 当成水平和垂直坐标轴,根据上方讲到的二维旋转,我们可以得到。
V′⊥=cos(θ)∗V⊥+sin(θ)∗W
那么 V′ 就等于。
V∥=(V⋅N)N
V⊥=V−V∥=V−(V⋅N)N
W=N×V⊥=N×(V−V∥)=N×V−N×V∥=N×V
V′=V′⊥+V′∥=cos(θ)∗V⊥+sin(θ)∗W+(V⋅N)∗N=cos(θ)∗(V−(V⋅N)∗N)+sin(θ)∗(N×V)+(V⋅N)∗N
把坐标轴基矢量带入上方式子中,那么绕任意过原点轴旋转的矩阵如下。
⎣⎡Nx2(1−cos(θ))+cos(θ)NxNy(1−cos(θ))+Nzsin(θ)NxNz(1−cos(θ))−Nysin(θ)0NxNy(1−cos(θ))−Nzsin(θ)Ny2(1−cos(θ))+cos(θ)NyNz(1−cos(θ))+Nxsin(θ)0NxNz(1−cos(θ))+Nysin(θ)NyNz(1−cos(θ))−Nxsin(θ)Nz2(1−cos(θ))+cos(θ)00001⎦⎤
总结
这篇文章如何利用矩阵变换物体,以及使用矩阵来变换物体和使用矩阵的好处。上面描述的各种变换中除了平移其他都是线性变换,任何线性变换都会将零矢量变换成零矢量,同时线性变换需要满足下方两个条件。
F(a+b)=F(a)+F(b)F(ka)=kF(a)
大家可以理解成线性变换不会使直线扭曲,变换后的平行线将继续平行。仿射变换是线性变换的超集,仿射变换包含平移。
这篇文章中渲染的立方体看起来有点奇怪,这是因为没有进行透视处理,下一篇文章将会讲解矩阵的另一个用处,如何实现相机功能。
如果觉得文章还不错欢迎点赞和关注来支持鼓励作者,我会尽快更新系列教程的下一篇文章。
零基础玩转 WebGL 系列文章目录请查看:零基础玩转 WebGL - 目录


