持续创作,加速成长!这是我参与「掘金日新计划 · 6 月更文挑战」的第2天,点击查看活动详情
评估问题
平时总是跟着学习,很少问为什么和进一步展开。今天我就想一想,解评估这样问题可以应用到哪些场景。其实我们根据过去观测序列加上可能预测的值作为一个观测序列,通过遍历所有下一个估计值可能来遍历概率,从中选择概率大多对应的值来作为对下一个时刻估计值。
先从相对比较简单问题开始,也就是评估问题,当拿到一个序列 O={o1,o2,⋯,oT} 这是观测到的数据,然后需要计算这个序列出现概率是多大,那么
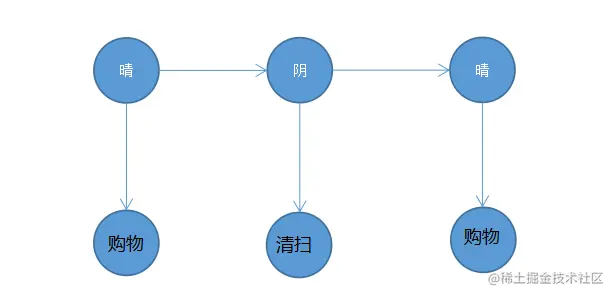
现在来看我们观测到序列为 购物→清扫→购物 然后计算这个序列概率。对于这个问题,观测变量背后的隐含变量我们是看不到的,而且这个也不需要知道正确答案,例如,观测到一个观测值为购物,那么购物可能是从晴天或者阴天,首先计算某一个时刻是晴天和阴天的概率,这个是由上一状态到当前状态的状态转移概率所,然后在计算每一个状态生成对应观测值。
我们先用数学语言来描述一下,参数 λ=[π,A,B] 和观测序列 O=(o1,o2,⋯,oT) 求解观测序列出现的的概率 P(O∣I,λ),基本方法就是列举出所有可能的状态 I=(i1,i2,⋯,iT) 接下来要求解的就是 P(O,I∣λ)
P(O,I∣λ) 表示观测序列的出现概率,其实这个问题解起来并不难,
我们首先需要将所有可能隐含状态序列遍历出来,然后根据状态转移矩阵来计算出每条的概率,也就是 P(I∣λ)
对于一个隐含状态序列 I=(i1,i2,…,iT) 出现的概率是,也就是出现某一条隐含状态序列的概率,这里 i1 表示某一个状态的随机变量。i1 取值是 Q 的某一个状态值,
P(I∣λ)=πi1ai1,i2ai2,i3⋯aiT−1,iT
通过贝叶斯或者联合概率可以得到 P(O,I∣λ)=P(O∣I,λ)P(I∣λ),
不过这样计算过程存在许多冗余计算,可以采用递归方式来避免重复计算,接下来
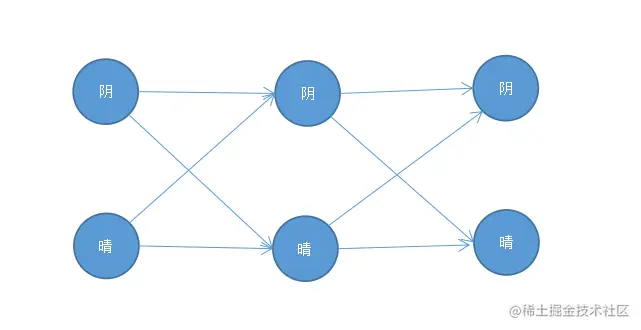
这里仅有 2 种隐状态,3 个时刻组成序列,那么排列组合有
晴天→晴天→晴天晴天→晴天→阴天阴天→阴天→阴天阴天→晴天→阴天阴天→晴天→晴天阴天→阴天→晴天晴天→阴天→阴天晴天→阴天→晴天
会有 23=8 排列组合,实际问题
前向算法
,也就是隐含变量,分别求解各个状态序列和观测序列的联合概率 P(O,I∣λ)
也就是从初始状态 πi1 这里 i 表示从 i1 表示在 1 时刻的状态概率,aa1,i2 表示从 i1 状态转移到 i2 状态概率,所以 P(I∣λ) 是序列 I
对于其中一种状态序列,观测序列的概率是,就是根据 i1 表示某一个状态,bi1(o1) 表示观测。
P(O∣I,λ)=bi1(o1)bi2(o2)…biT(oT)
P(O,I∣λ)=P(O∣I,λ)P(I∣λ)=πi1bi1(o1)ai1,i2bi2(o2)⋯aiT−1,iTbiT(oT)
总结上面公式,P(I∣λ) 来计算序列状态之间的转移概率联乘,P(O∣I,λ) 表示在某一个状态下乘以生成概率。
P(O∣λ)=I∑P(O∣I,λ)P(I∣λ)=i1,i2,…,iT∑πi1bi1(o1)ai1,i2bi2(o2)⋯aiT−1,iTbiT(oT)
也就是遍历所有可能的隐含序列 $$
所谓前向计算也就是一层一层地计算,从而避免重复计算
前向概率,给定隐马尔可夫模型 λ 参数前提,定义到时刻 t 时刻部分观测序列为 o1,o2,…,ot 状态 qt 的概率为前向概率。前向概率对应某 t 时刻 j 状态,例如 at+1(i) 表示在 t+1 时刻,i 状态概率,在 t 时刻
计算初值
也就是计算第一时间处于各个隐状态的概率分布,
α1(i)=πibi(o1)1≤i≤N
等式右边表示最初第 i 个状态出现的概率,πi 表示 i 状态其实概率,然后乘以从 i 状态发射概率 bi(o1)。
迭代步骤
引入动态规划的思想,也就是问题分解一些小的问题,这些小的问题。中间步骤,在 t+1 时刻 i 状态的前向概率,是首先将 t 时刻 j 状态都乘以 aij
αt+1(i)=[j=1∑Nαt(j)aij]bi(ot+1)
最后步骤
最后步骤就是将每一个节点的前向概率进行汇总求和,作为观测序列的评估概率。
P(O∣λ)=i=1∑NαT(i) 

