欧氏距离 Euclidean Distance
比较常用的距离,常用于表示空间中两个点或多点间的直线距离,对于n维空间,存在点x和y(用n维向量表示),有:
d(x,y)=i=1∑n(xi−yi)2
然而欧式距离的局限性很大,包括:
- 会受到量纲(单位标准,scale)的影响
例如,提取一个人身高和体重的特征,身高用cm为单位,体重用g为单位,A身高160体重60000,B身高160体重59000,C身高170体重60000,度量他们的欧式距离:
d(A,B)=(160−160)2+(60000−59000)2d(A,C)=(160−170)2+(60000−60000)2
显然,d(A,B)>d(A,C),然而根据常识可以判断A和B的体型比B和C更近,可以发现,欧式距离在这个案例中不适用。
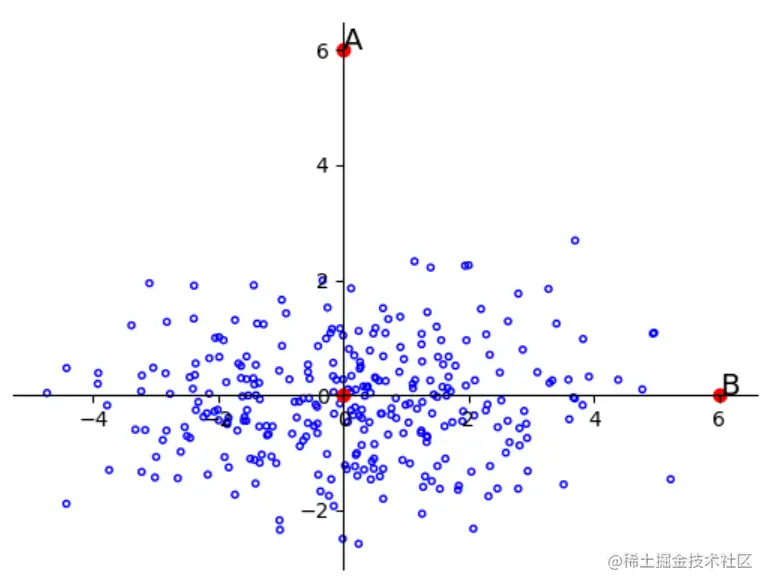
- 会受到样本分布的影响
如下图所示,如果用欧氏距离度量AB两点到样本集合中心点的距离,那会得到AB两点距离相同的结论,然而根据分布看显然B点比A点更可能属于这个样本集。
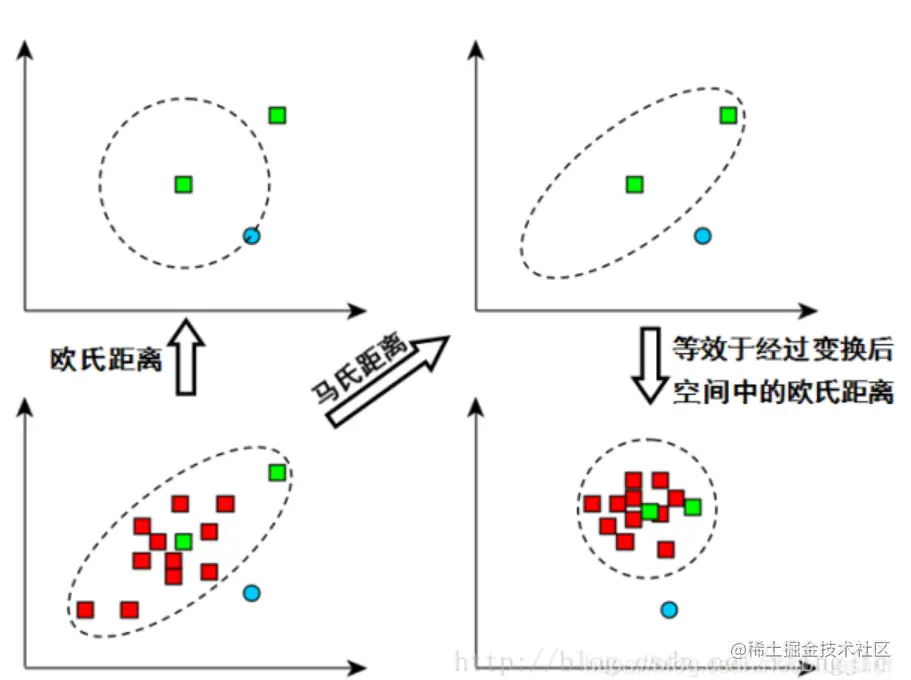
马氏距离 Mahalanobis Distance
鉴于上述欧式距离的局限性,马氏距离被提出了修正这些问题。要学习马氏距离需要了解方差、协方差和协方差矩阵的一些基本知识,这些在主成因分析PCA中有提到过。马氏距离的物理意义是在规范化主成因空间(即通过对数据使用PCA方法,形成新的坐标轴)中的欧式距离。如下图所示:
马氏距离总共分为两个步骤:
- 首先旋转坐标轴使各个维度间线性无关。
- 然后将不同维度上的数据压缩成为方差为1的数据集(归一化)。
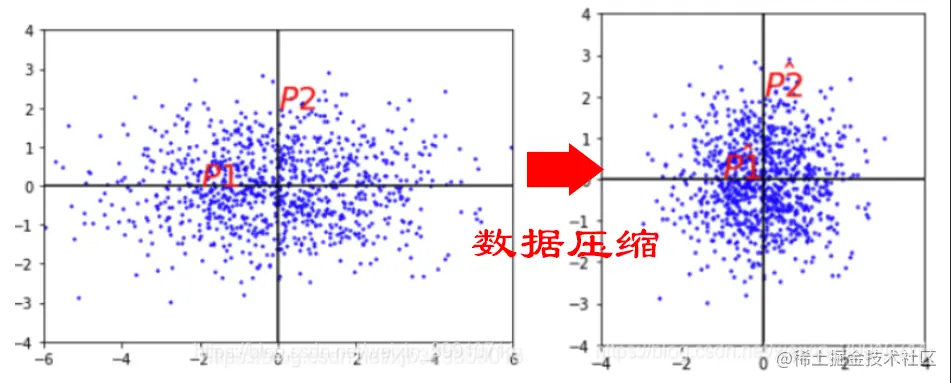
为什么要压缩数据(归一化)
在下图所示的空间中,P1、P2点到数据集中心的欧式距离是一样的,但显然P1比P2更可能属于该数据集,通过归一化方法,使数据在不同维度上方差统一,同时消除量纲的影响。
为什么要旋转坐标轴
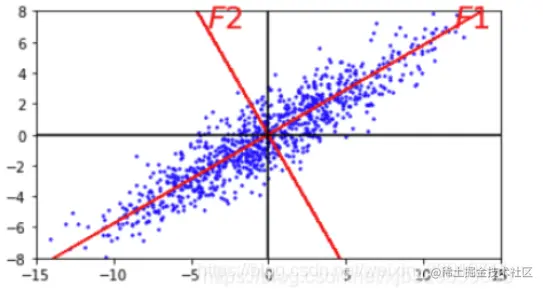
如下图所示,当不同维度间具有相关性(即联合分布和坐标轴有一定角度)时,数据只沿着横纵坐标轴的方向压缩,并不能改变图中A和B两点到中心的马氏距离计算结果。
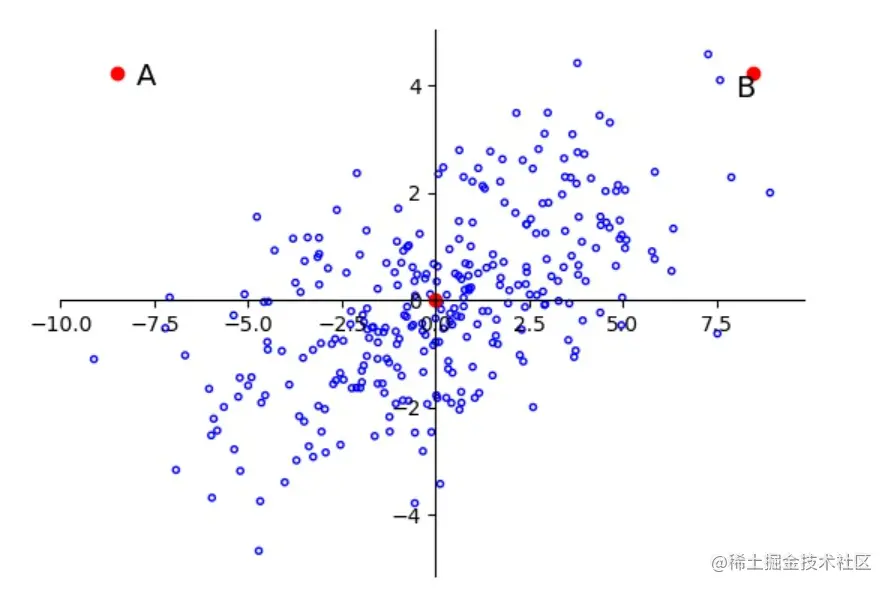
更最好的压缩方法是沿着F1和F2的方向压缩,因此需要将坐标轴旋转成F1和F2的方向,此时就需要通过协方差矩阵确定如何旋转。
理解是旋转坐标轴,在操作中是旋转改变数据点,假设原始数据集为X(n×m),n为样本总数,m为样本特征维度:
X=⎣⎡x11...xn1.........x1m...xnm⎦⎤
通过旋转矩阵U旋转到新的坐标系统(即上文说的F1和F2)中得到一个新的数据集F。
UXT=FT=(F1,F2,...,Fm)T
新样本集的均值为μF=(μF1,...μFm)T,可得:
(F−μF)T=U(X−μX)T得到:(F−μF)=UT(X−μX)
由于将数据集旋转后不同维度间是线性无关的,所以新数据集F的协方差矩阵ΣF应为对角阵,且主对角元素(特征值)均为每个维度的方差:
ΣF=⎣⎡λ1λ2...λm⎦⎤
由协方差矩阵的公式和前面的推倒可得:
ΣF=E((F−μF)T(F−μF))=n1U(X−μX)T(X−μX)UT=UΣXUT
对于数据集X,其中一样本点x到样本中心μX的马氏距离等同于求点Fx到样本中心μF的欧氏距离:
d(x,μX)2=d(Fx,μF)2=i=1∑m(λiFxi−μFi)2=(Fx1−μF1,...,Fxm−μFm)TΣF−1(Fx1−μF1,...,Fxm−μFm)=(F−μF)T(UTΣXU)−1(F−μF)=(x−μX)TUUTΣX−1UUT(x−μX)=(x−μX)TΣX−1(x−μX)
有上述内容可得马氏距离的定义:
对于一个均值为μ=(μ1,...,μn)T且协方差矩阵为Σ的多变量空间x=(x1,...,xn)T,其马氏距离为:
dM(x)=(x−μ)Σ−1(x−μ)
或可以定义为两个服从同一分布且协方差矩阵为Σ的随机变量x和y间的差异程度:
dM(x,y)=(x−y)TΣ−1(x−y)
当协方差矩阵为单位矩阵(即x和y的联合分布为正圆,x和y独立同分布线性无关)时,上式化为欧式距离的算法:
dM(x,y)=i=1∑nσi2(xi−yi)2
曼哈顿距离 Manhattan Distance
跟直线距离计算不同,曼哈顿距离常用于计算路径,指空间中两点或多点间连线对应坐标轴投影的距离和,如下图所示。
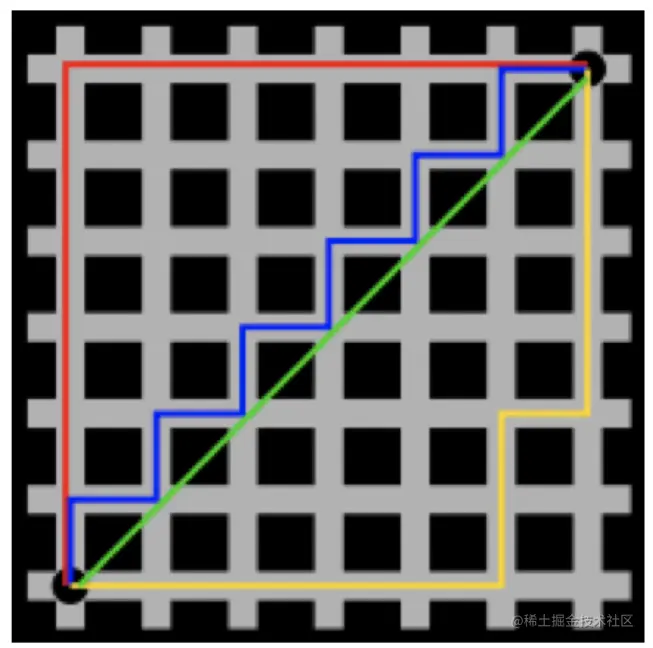
对于二维平面的点a(x1,y1)和b(x2,y2)间的曼哈顿距离定义为:
dab=∣x1−x2∣+∣y1,y2∣
扩展到n维空间(a(x11,...,x1n)和b(x21,...,x2n))得到:
dab=k=1∑n∣x1k−x2k∣ 

