这是我参与8月更文挑战的第12天,活动详情查看:8月更文挑战
前边的代价函数就是使用梯度下降而得到其最小值的。梯度下降当然也可以用于其他的代价函数J。
梯度下降是什么?
对于一个代价函数J(θ0,θ1,θ2,…),我们想要使其最小化:
- 初始时候令θi都为0
- 逐渐改变θi的值
- 直到得到最小值或者局部最小值
用图解释一下梯度下降,对于代价函数J(θ0,θ1),如下一个三维图形,你先想象成这是一篇山区。你从任意一个点开始下山,每次环顾四周,找一个同样步长的最低点向下移一步,直到最低点。
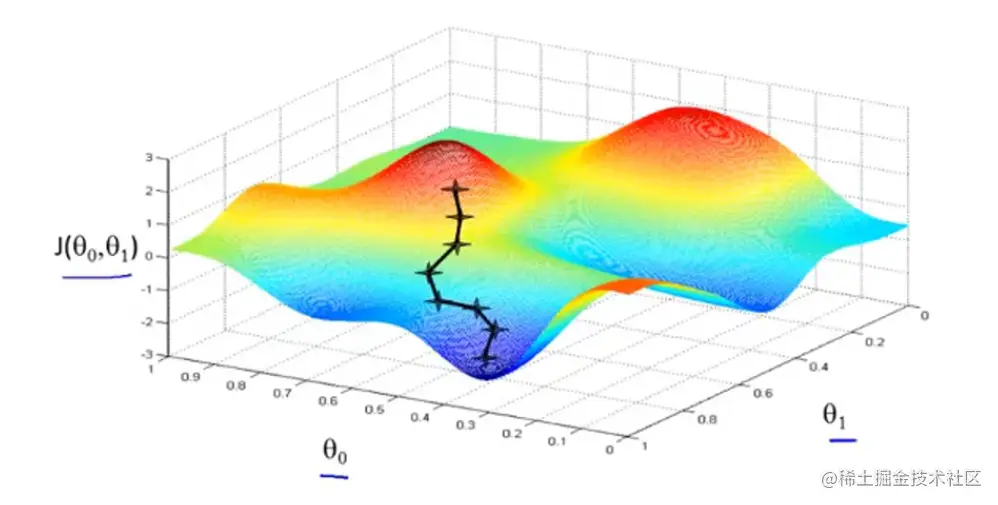
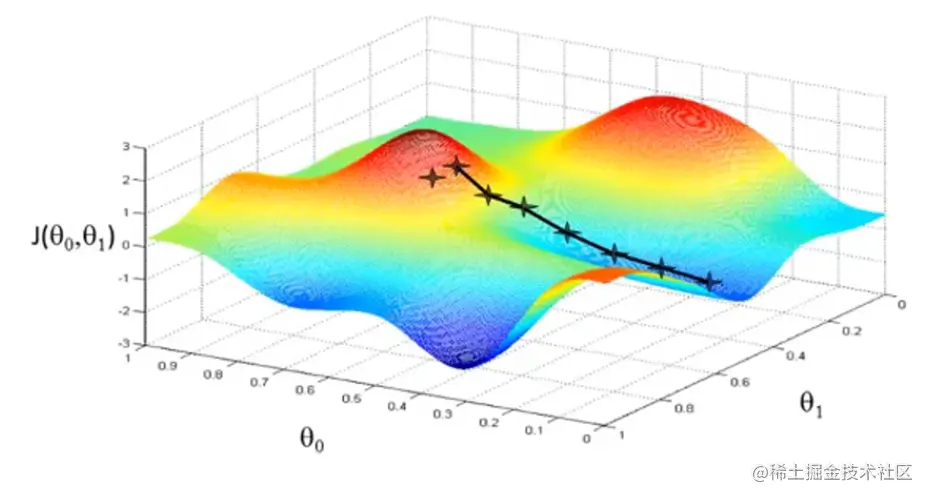
但是如果你起始点不同,可能会找到另一个最低点。也就是说梯度下降算法起始点不同找到的最优解可能是不同的。
梯度下降算法定义:
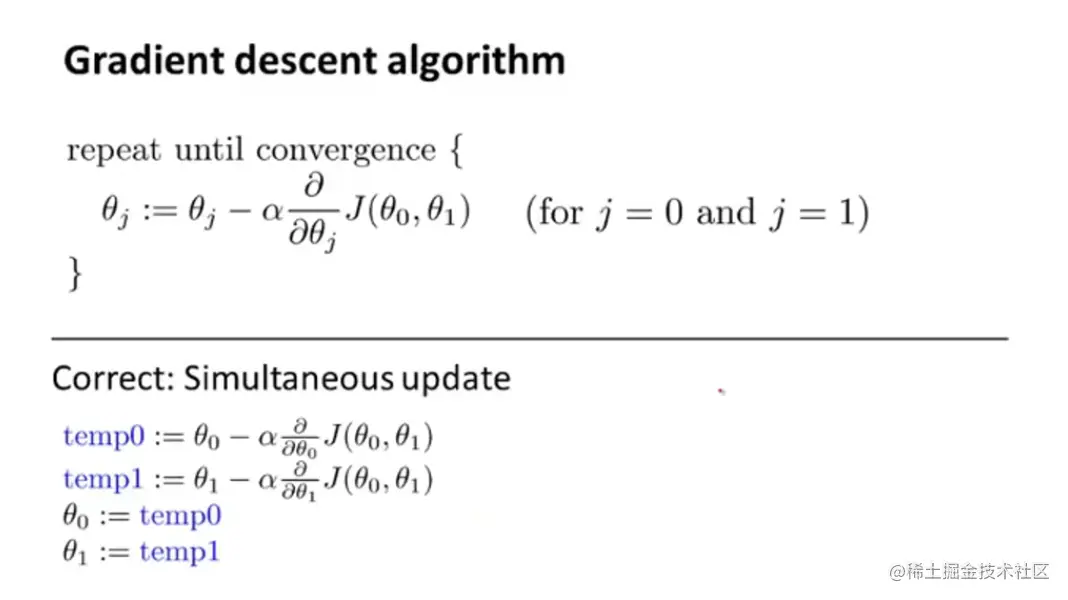
- :=是赋值符号,比如a:=b就是给a赋上b的值
- =是判断符号,比如a=b如果两个值相等返回true,否则返回false
- α控制梯度下降的步长,如果α较大那下降的就会很迅速
- ∂θj∂J(θ0,θ1)求导
- 对于上述公式正确的执行步骤:
- 使用θ0,θ1更新temp
- 使用temp更新θ0,θ1
解释一下α∂θj∂J(θ0,θ1)有什么用
- α前边说了,它的大小控制梯度下降的步长大小,可以称之为学习速率,其取值永远为正数。
- 对于∂θj∂J(θ0,θ1)求导公式我们依旧先从最简单的例子开始。
先解释导数部分
假设现在的代价函数是J(θ1)其中θ1∈R,那他的图像应该是个一元二次函数。
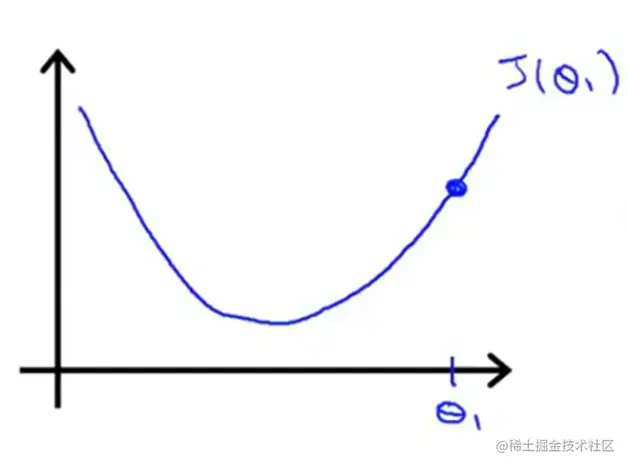
现在从右边蓝色这个点进行梯度下降,那就会得到结果θ1:=θ1−αdθ1dJ(θ1)
你可能会注意到原来公式中的∂变为d了,
符号 d 与符号 ∂ 的区别是什么?
∂ 指偏微分。对于一个多元函数 f(x,y),∂x∂f 相当于固定 y 变量, 对 x 进行求导。
d 指全微分。对于一个多元函数 f(x,y),df=∂x∂f dx+∂y∂f dy 。
在复合函数中, 全微分的概念更加有用。设多元函数 f(x(t),y(t)), 则 dtdf=∂x∂f dtdx+∂y∂f dtdy 。
对于单变量函数, 偏微分和全微分没有区别, 所以均用 dxd 表示。
我们都知道在上图中导数的几何意义是过蓝色点切线的斜率,而图中可知这个斜率一定是个正数。再加上前边的条件α学习速率一定是正数,那原式就可以理解为θ1:=θ1−一个正数,那θ1一定会向左移,从而使J(θ1)减小。
为什么我把“从而使J(θ1)减小”这句话划掉了呢,因为你考虑一下,如果α取值过大,那它可能移动的太大而越过了最小值,而在最小值左右两侧反复横跳。
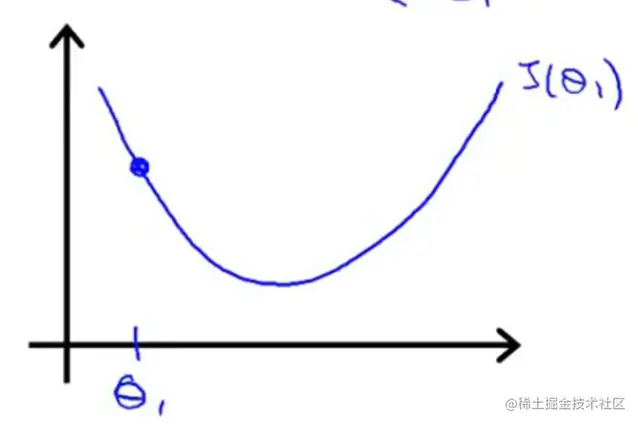
同理看下图,如果初始θ1在最低点的左侧,那现在改点的斜率是个负数,此时原式就可以理解为θ1:=θ1−一个负数,导致θ1增大,使其右移。
再解释一下α
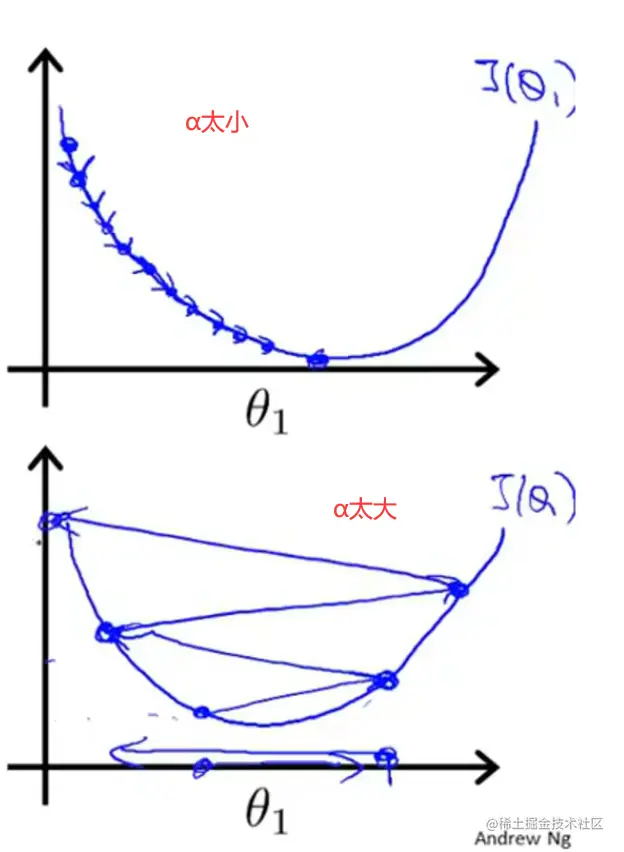
现在再讨论一下α。如果过大或者过小会有什么影响。
If α is too small, gradient descent can be slow.
If a is too large, gradient descent can overshoot the minimum It may fail to converge or even diverge.
如果α太小,那梯度下降的速度就会很慢;如果太大,就会出现我上边提到的状况,可能直接越过最小值,在最小值左右两边反复横跳,离得原来越远(为什么会离得越来越远慢慢往下看就懂了)。
提问!
如果此时θ1已经处于一个局部最优点,那会如何移动?
(?我也不知道为啥吴恩达老师会提这种问题,学过高中数学的就会回答这个问题了吧 )
)
最低点切线是水平的,斜率为0,所以公式就是θ1:=θ1−α×0=θ1 ,到达局部最优解之后就停在原地不动了。
Gradient descent can converge to a local minimum even with the learning rate α fixed.
(α取值合适的前提下)虽然α是固定值,但是梯度下降却可以取得局部最小值。
As we approach a local minimum, gradient descent will automatically take smaller steps.
So, no need to decrease α over time.
因为梯度下降越接近局部最小值,下降步长会越小,也就是说下降步长会随着逐渐靠近局部最优解而逐渐减小,因此我们无需改变α的值就可以顺利取到局部最小值。
看下图理解一下:
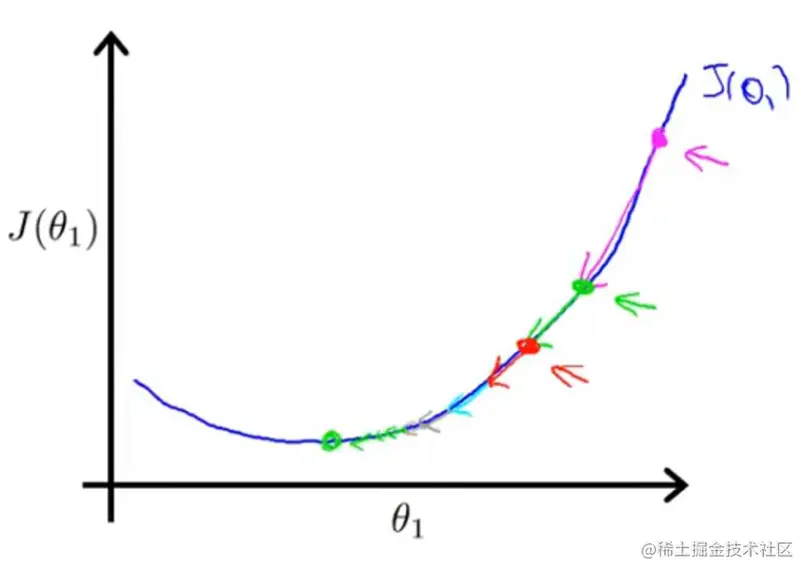
从最右侧粉色的点开始进行梯度下降,下降以后到达绿色的点。
θ1:=θ1−α×kpink
从绿色点进行梯度下降,θ1:=θ1−α×kgreen
红色的点进行梯度下降:θ1:=θ1−α×kred
这三个点有什么区别?
越接近最低点,曲线越平缓,下降点的斜率越小。
对于θ1:=θ1−αdθ1dJ(θ1),其中dθ1dJ(θ1)逐渐减小,会导致αdθ1dJ(θ1)逐渐减小,也就是每次θ1减的值逐渐减小,使θ1移动逐渐减缓。
回到线性回归
既然我们已经弄懂了代价函数J(θ1),那现在就回到J(θ0,θ1)。
∵J(θ0,θ1)=2m1∑i=1m(hθ(x(1))−y(i))2
∴∂θj∂J(θ0,θ1)=2θj∂⋅2m1∑i=1m(hθ(x(i))−y(i))2
∵hθ(x)=θ0+θ1x
∴∂θj∂J(θ0,θ1)=2θj∂⋅2m1∑i=1m(hθ(x(i))−y(i))2=∂θj∂2m1∑i=1m(θ0+θ1x(i)−y(i))2
所以此时:(这个感兴趣的自己求嗷……我直接写现成结果了。)
θ0:∂θ0∂J(θ0,θ1)=m1i=1∑m(hθ(x(i))−y(i))θ1:∂θ1∂J(θ0,θ1)=m1i=1∑m(hθ(x(i))−y(i))⋅x(i)
推导过程写完了,得出结论,对于线性回归来说,梯度下降如下:
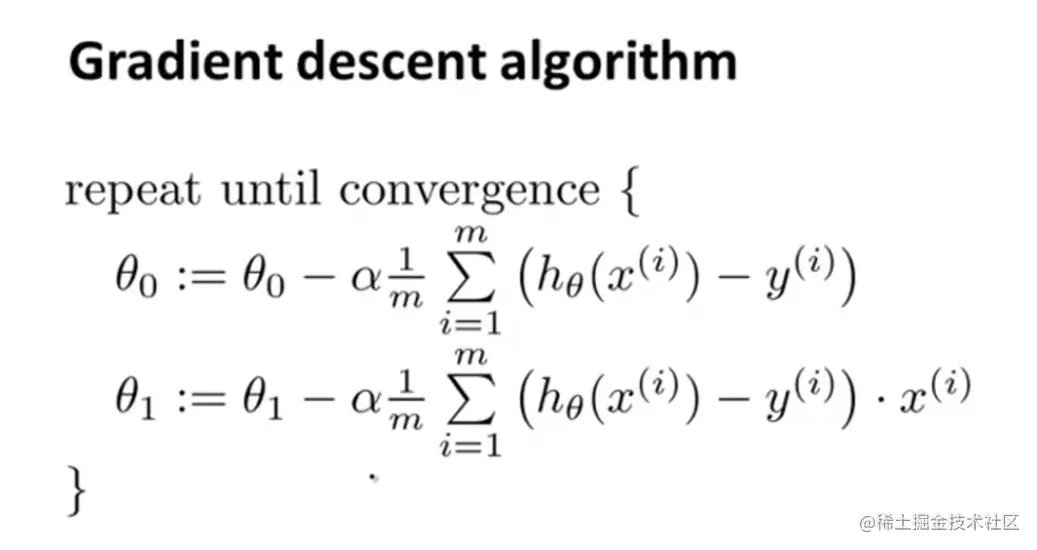
还记得解释什么叫梯度下降时候使用的三维图吗(就是那个想象成下山那个图,不记得的往上翻一下。)
线性回归的代价函数一般不会那么复杂,always going to be a bow-shaped function. 碗状图。专业术语叫“convex function”。
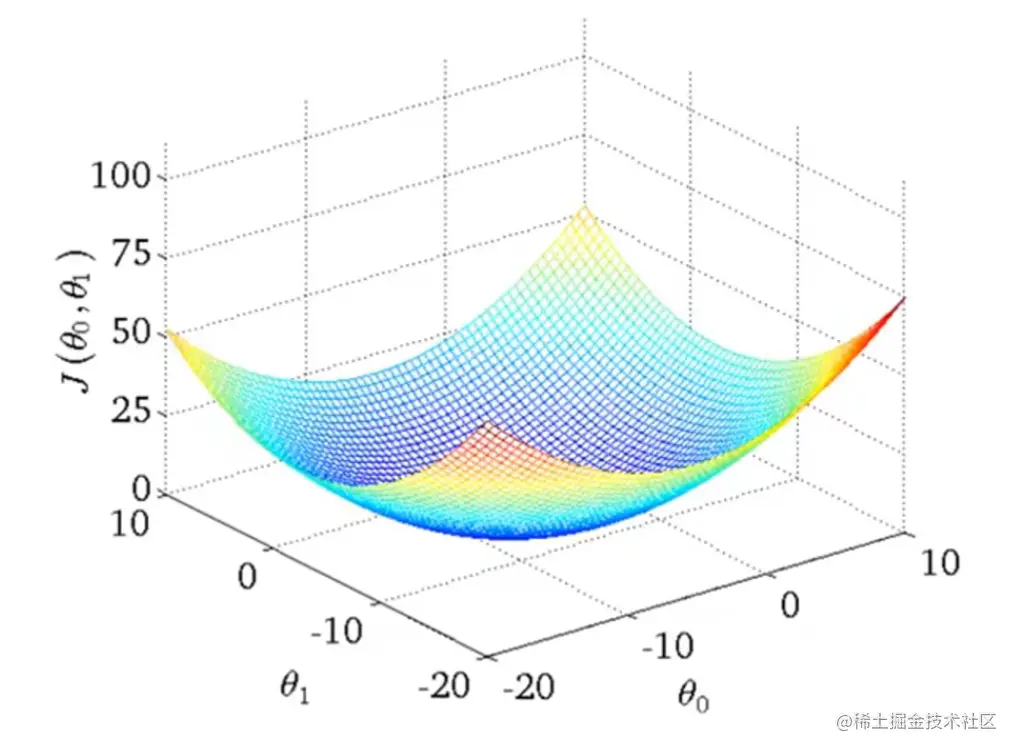
这种图不仅看起来比那种图简单,实际操作也简单,没有局部最优解,只有全局最优解,也就是说不管你从哪里开始最后找到的最优解都是一样的。
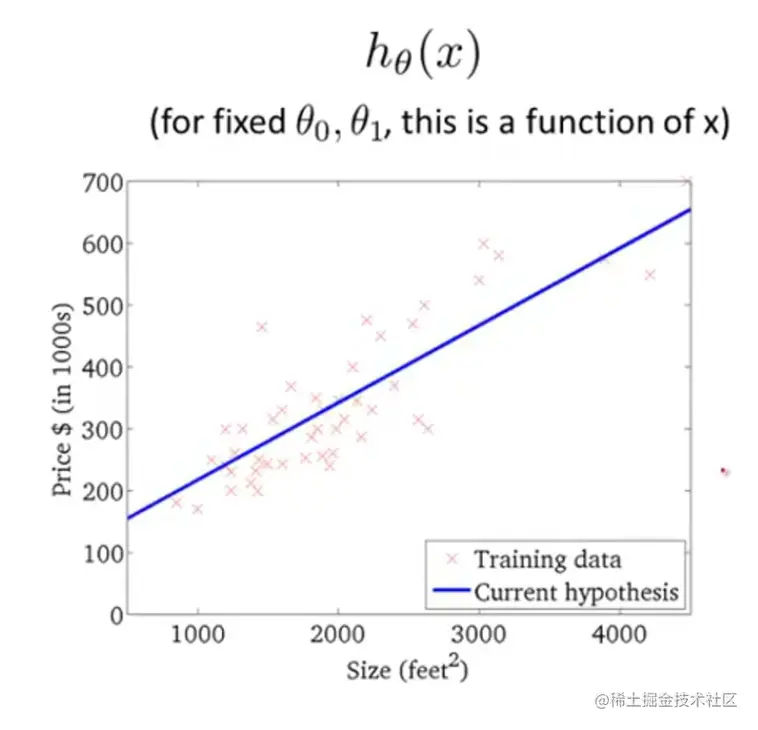
再回到之前的例子,还是这个等高图,从点1开始进行梯度下降,最后找到最优解(此时已经找到代价函数的最小值)。每一步都对应一个回归函数图像,点1-4和最优解的回归函数都画出来了,肉眼可见的最后一张图拟合程度最高。
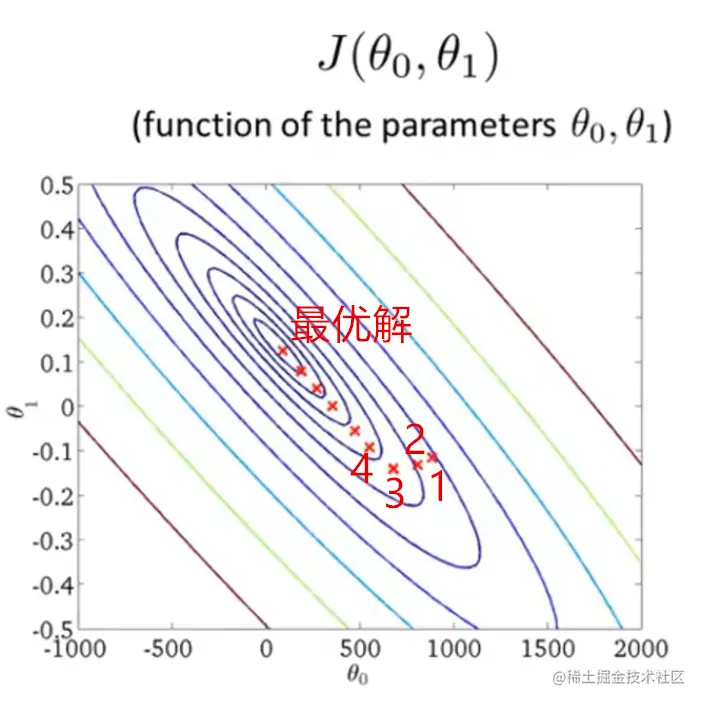

放一个详细点的最后一张图:
Batch
这个梯度下降又称为“Batch” gradient Descent
"Batch":Each step of gradient descent uses all the training examples
指的是每一步都要遍历整个训练集。因为2m1∑i=1m(hθ(x(1))−y(i))2公式每一步都要对总体求和。


