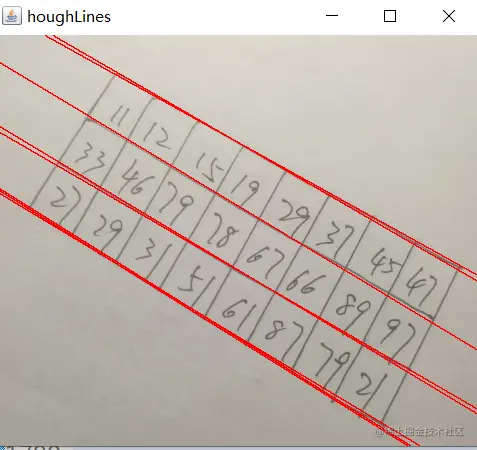
1.HoughLines
public static void houghLines(Mat image){
Mat clone=image.clone()
Imgproc.GaussianBlur(clone, clone, new Size(3, 3), 0, 0)
//HighGui.imshow("GaussianBlur", clone)
Imgproc.cvtColor(clone, clone,Imgproc.COLOR_BGR2GRAY)
//HighGui.imshow("GRY", clone)
//一般来说,高阈值maxVal推荐是低阈值minVal的2~3倍
int lowThresh=20
////边缘检测
Imgproc.Canny(clone, clone,lowThresh, lowThresh*3,3)
//HighGui.imshow("Canny", clone)
Mat storage = new Mat()
/**
* HoughLines(Mat image, Mat lines, double rho, double theta, int threshold, double srn, double stn, double min_theta, double max_theta)
* image 原图
* lines 霍夫线变换检测到线条的输出矢量,由(ρ,θ)表示
* rho 以像素为单位的距离精度(直线搜索时的进步尺寸的单位半径)
* theta 以弧度为单位的角度精度(直线搜索时的进步尺寸的角度单位)
* threshold 累加平面的阈值参数(直线被识别时它在累加平面中必须达到的值)
* srn 对于多尺度霍夫变换,这是第三个参数进步尺寸的除数距离。
* 粗略累加器进步尺寸直接是rho,精确的累加器进步尺寸为rho/srn
* min_theta 检测到的直线的最小角度
* max_theta 测到的直线的最大角度
*/
Imgproc.HoughLines(clone, storage, 1, Math.PI/ 180.0, 200, 0, 0)
for (int x = 0
double[] vec = storage.get(x, 0)
double rho = vec[0]
double theta = vec[1]
Point pt1 = new Point()
Point pt2 = new Point()
double a = Math.cos(theta)
double b = Math.sin(theta)
double x0 = a * rho
double y0 = b * rho
pt1.x = Math.round(x0 + 1000 * (-b))
pt1.y = Math.round(y0 + 1000 * (a))
pt2.x = Math.round(x0 - 1000 * (-b))
pt2.y = Math.round(y0 - 1000 * (a))
Imgproc.line(image, pt1, pt2, new Scalar(0, 0, 255), 1, Imgproc.LINE_4, 0)
}
HighGui.imshow("houghLines", image)
}
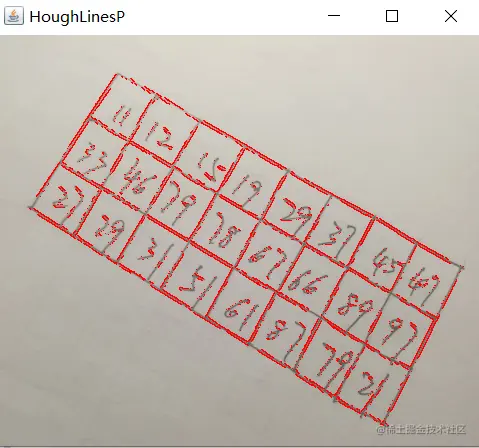
2.HoughLinesP
public static void houghLinesP(Mat image){
Mat clone=image.clone()
Imgproc.GaussianBlur(clone, clone, new Size(3, 3), 0, 0)
//HighGui.imshow("GaussianBlur", clone)
Imgproc.cvtColor(clone, clone,Imgproc.COLOR_BGR2GRAY)
//HighGui.imshow("GRY", clone)
//一般来说,高阈值maxVal推荐是低阈值minVal的2~3倍
int lowThresh=20
////边缘检测
Imgproc.Canny(clone, clone,lowThresh, lowThresh*3,3)
//HighGui.imshow("Canny", clone)
Mat storage = new Mat()
/**
* HoughLinesP(Mat image, Mat lines, double rho, double theta, int threshold, double minLineLength, double maxLineGap)
* image 原图
* lines 霍夫线变换检测到线条的输出矢量,由(ρ,θ)表示
* rho 以像素为单位的距离精度(直线搜索时的进步尺寸的单位半径)
* theta 以弧度为单位的角度精度(直线搜索时的进步尺寸的角度单位)
* threshold 累加平面的阈值参数(直线被识别时它在累加平面中必须达到的值)
* minLineLength 最低线段的长度,比它短的线段不能被显示出来。
* maxLineGap 允许将同一行点与点之间连接起来的最大距离
*/
Imgproc.HoughLinesP(clone, storage, 1, Math.PI / 180, 50, 0, 0)
for (int x = 0
{
double[] vec = storage.get(x, 0)
double x1 = vec[0], y1 = vec[1], x2 = vec[2], y2 = vec[3]
Point start = new Point(x1, y1)
Point end = new Point(x2, y2)
Imgproc.line(image, start, end, new Scalar(0, 0, 255, 255), 1, Imgproc.LINE_4, 0)
}
HighGui.imshow("HoughLinesP", image)
}
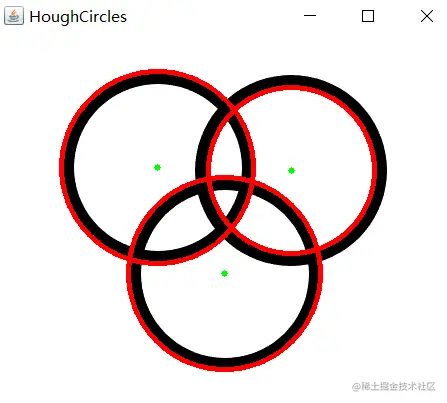
3.HoughCircles
public static void houghCircles(Mat image){
Mat dst = image.clone()
Imgproc.cvtColor(image, dst, Imgproc.COLOR_BGR2GRAY)
Mat circles = new Mat()
/**
* HoughCircles(Mat image, Mat circles, int method, double dp, double minDist, double param1, double param2, int minRadius, int maxRadius)
* image 原图
* circles 检测到的圆的输出矢量,每个矢量由(x,y,radius)表示
* method 检测方法,填HOUGH_GRADIENT即可
* dp 用来检测圆心的累加器图像的分辨率于输入图像之比的倒数,
允许创建一个比输入图像分辨率低的累加器。
若dp=2,则累加器由输入图像一半大的宽度和高度)
* minDist 霍夫变换检测到的圆的圆心之间的最小距离
* param1 传给canny算子的高阈值,而低阈值为高阈值的一半
* param2 在检测阶段圆心的累加器阈值
越小越可以检测不存在的圆,越大检测的圆更接近完美的圆形
* minRadius 圆半径的最小值
* maxRadius 圆半径的最大值
*/
Imgproc.HoughCircles(dst, circles, Imgproc.HOUGH_GRADIENT, 1, 100, 440, 50, 0, 345)
// Imgproc.HoughCircles(dst, circles, Imgproc.HOUGH_GRADIENT, 1, 100,
// 440, 50, 0, 0)
for (int i = 0
{
double[] vCircle = circles.get(0, i)
Point center = new Point(vCircle[0], vCircle[1])
int radius = (int) Math.round(vCircle[2])
// circle center
Imgproc.circle(image, center, 3, new Scalar(0, 255, 0), -1, 8, 0)
// circle outline
Imgproc.circle(image, center, radius, new Scalar(0, 0, 255), 3, 8, 0)
}
HighGui.imshow("HoughCircles", image)
}


