

马尔科夫性 - 马尔可夫过程 - 马尔可夫奖励过程 - 马尔可夫决策过程
概述
马尔可夫决策过程(Markov Decision Processes, MDPs)是对强化学习问题的数学描述。
- 要求环境是全观测的。
马尔可夫性
“ 只要知道现在,将来和过去是条件独立的,可以抛去过去所有的信息。”
定义:如果在t时刻的状态满足下式,则这个状态被称为马尔科夫状态,即该状态满足马尔科夫性
注:
- 状态
包含了所有历史相关信息,即之前的信息都可以在该状态上体现出来(
- 所以要求环境是全观测的,(如果是部分观测的话,状态信息有缺失)。
- 是否满足马尔可夫性与状态的定义息息相关
例子:
- 下棋
- 俄罗斯方块
有了马尔可夫状态之后:
- 可以定义状态转移矩阵
- 忽略时间的影响,只关心当前时刻
注: 状态是否满足马尔可夫性,与状态的定义息息相关。
状态转移矩阵
状态转移概率
状态转移概率指从一个马尔可夫状态 s 跳转到后继状态 (successor state) s′ 的概率。是关于当前状态的条件概率分布。
状态转移矩阵
若状态是离散的(有限个):
- 所有的状态组成行
- 所有后继状态组成列,
得到状态转移矩阵
为状态个数
- 每行元素相加为1
状态转移函数
若**状态数量过多,或者无穷大(连续状态)**的,适合用本节最上式的函数形式表示。
- 此时,
马尔可夫过程
定义
一个马尔可夫过程 (Markov process, MP) 是一个无记忆的随机过程,即一些马尔可夫状态的序列。
马尔可夫过程可由一个二元组来定义
:代表状态集合
:代表状态转移矩阵
通常假设
马尔可夫过程的例子
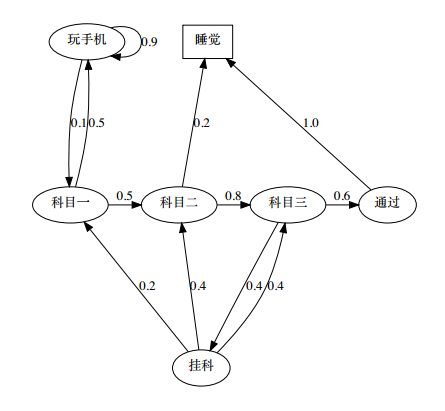
- 马尔可夫过程中的终止状态有2种:
- 时间终止
- 状态终止
片段(Episode)
定义: 强化学习中,从初始状态 到终止状态
的序列过程。
马尔可夫奖励过程
定义
在马尔可夫过程的基础上,在转移关系中赋予不同的奖励值,即得到马尔可夫奖励过程。
马尔可夫奖励 (Markov Reward Process, MRP) 过程由一个四元组组成
- S:状态集合
:奖励函数,
描述了在状态 s 的奖励,
:衰减因子
回报值
- 奖励值:对一个状态的评价
- 回报值:对一个片段的评价
回报值(return )是从时间t处开始的累积衰减奖励
MRPs中的值函数
为什么要值函数? 回报值是一个片段的结果,存在很大的样本偏差 回报值的角标是 t,值函数关注的是状态 s
一个 MRP 的值函数如下定义
这里的值函数针对的是状态 s,所以称为状态值函数,又称 V 函数
MRPs中的贝尔曼方程(重点)
当前状态的值函数包括两部分:
- 第一项:瞬时奖励
- 第二项:后继状态的值函数乘衰减系数
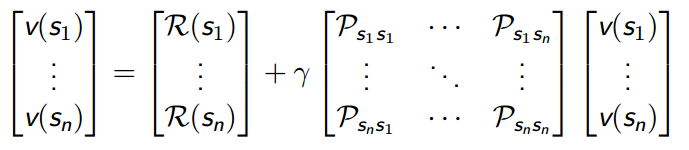
由于后继状态可能有多个,因此如果已知转移矩阵 ,那么
矩阵-向量形式为:
本质上是一个线性方程,可以直接解:
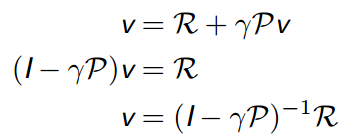
直接求解只适用于小型MRPs:
- 计算复杂度
- 要求已知
马尔可夫决策过程
MP 和 MRP 中,我们都是作为观察者,去观察其中的状态转移现象,去计算回报值。对于一个 RL 问题,我们更希望去改变状态转移的流程,去最大化回报值。因此,在 MRP 中引入决策,得到马尔可夫决策过程(Markov Decision Processes, MDPs)
定义
一个马尔可夫决策过程 (MDPs) 由一个五元组构成
: 动作的集合
:奖励函数, 表示在状态s做动作a的奖励。
策略
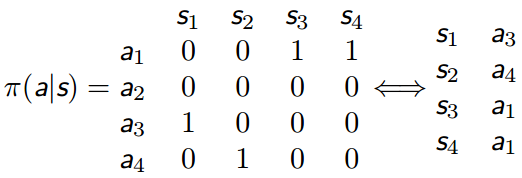
在 MDPs 中,一个策略 (Policy)π 是在给定状态下的动作的概率分布

- 策略是时间稳定的,只与s有关,与时间t无关
- 是RL问题的终极目标
- 如果分布是 one-hot 的,那么为确定性策略,否则为随机策略
MDPs与MRPs之间的关系
如果MDP问题给定策略,则会退化成MRP问题。
MDPs中的值函数
-
状态值函数(V函数)
- 定义:从状态s开始,使用策略
得到的期望回报值
- 定义:从状态s开始,使用策略
-
状态动作值函数(Q函数)
-
定义:MDPs 中的状态动作值函数是从状态 s 开始,执行动作 a, 然后使用策略 π 得到的期望回报值
动作a不一定来自于策略
-
贝尔曼期望方程
和 MRP 相似, MDPs 中的值函数也能分解成瞬时奖励和后继状态的值函数两部分
