Module10 根轨迹
引言
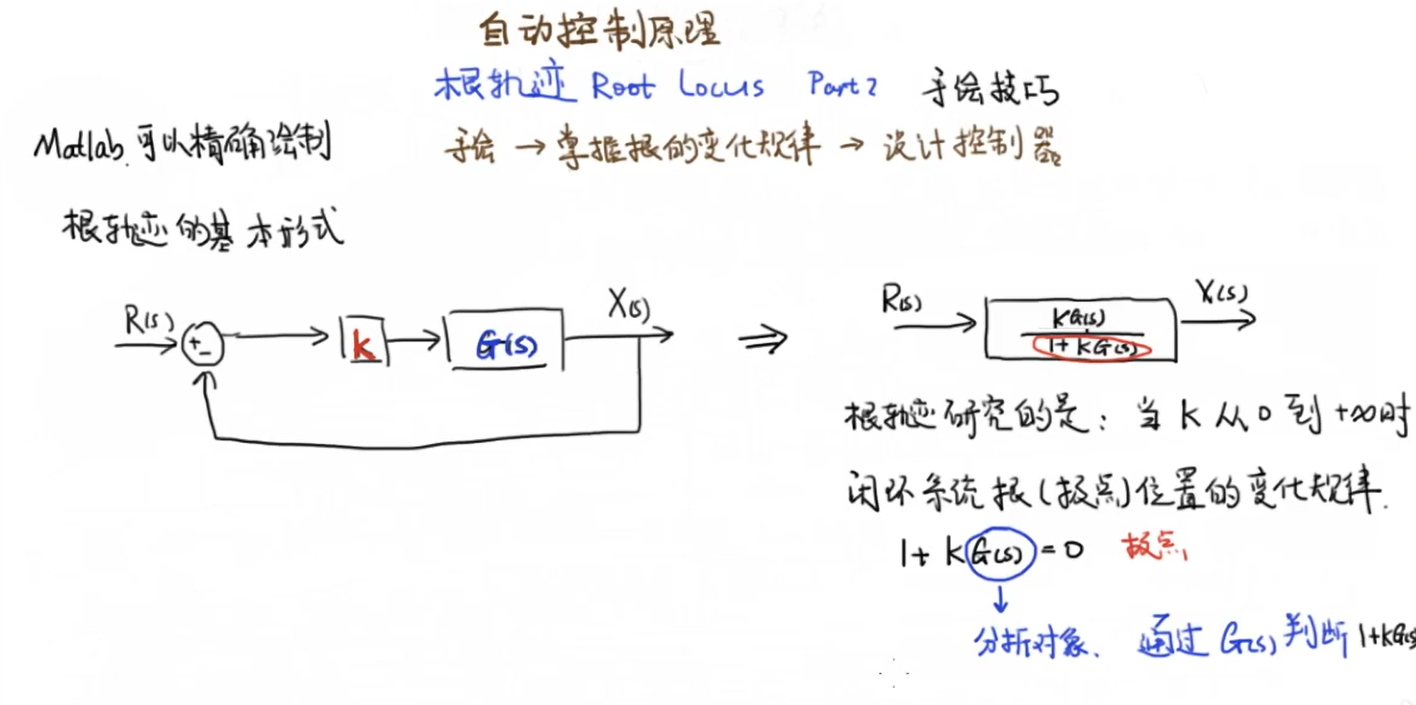
根轨迹:
目的:求闭环极点
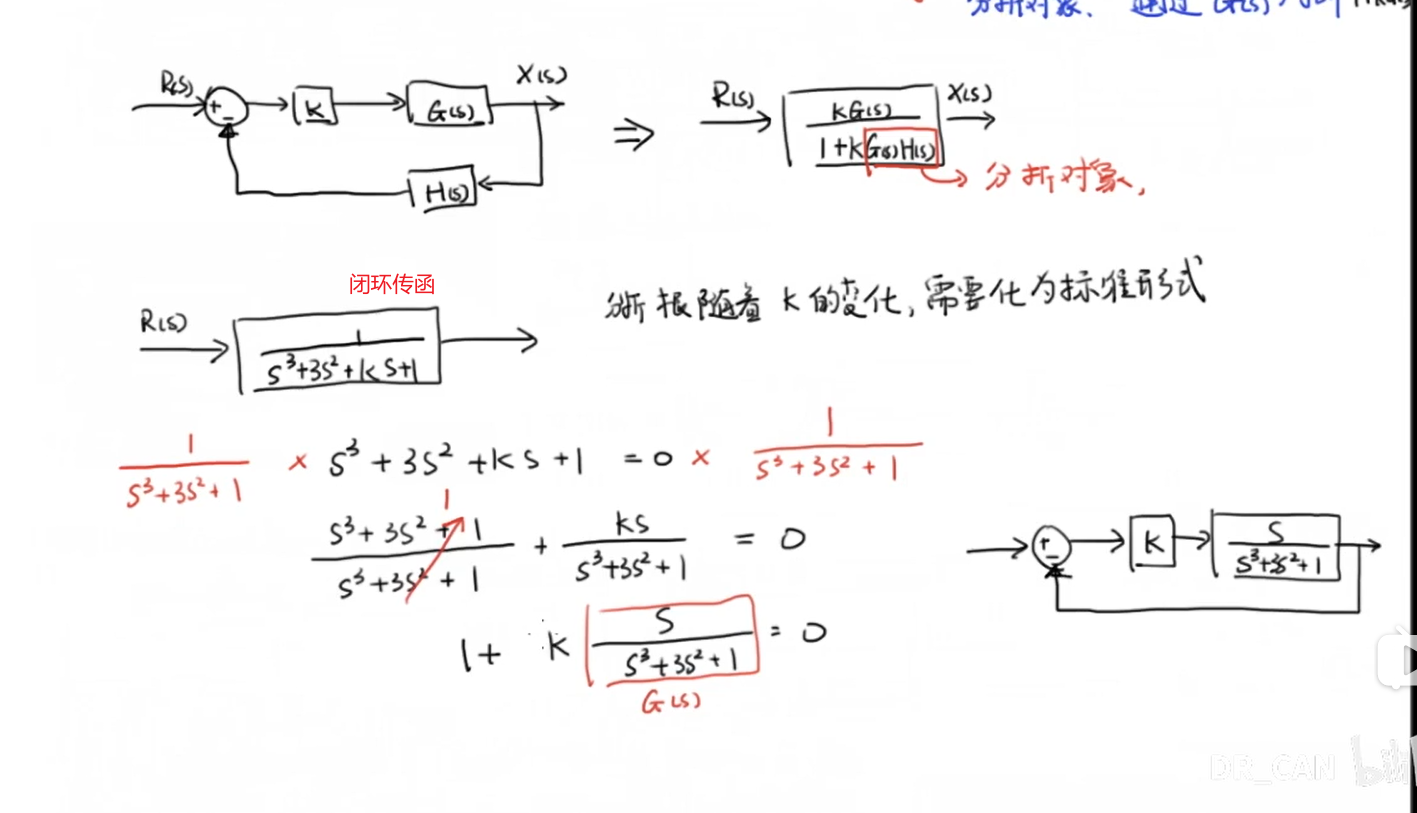
思想:几何----解闭环特征方程:代数
方法:画图
本质:搜索算法
表现:经验规则
优点:一次性找到所有闭环极点可能的位置和变化趋势
缺点:非完备性
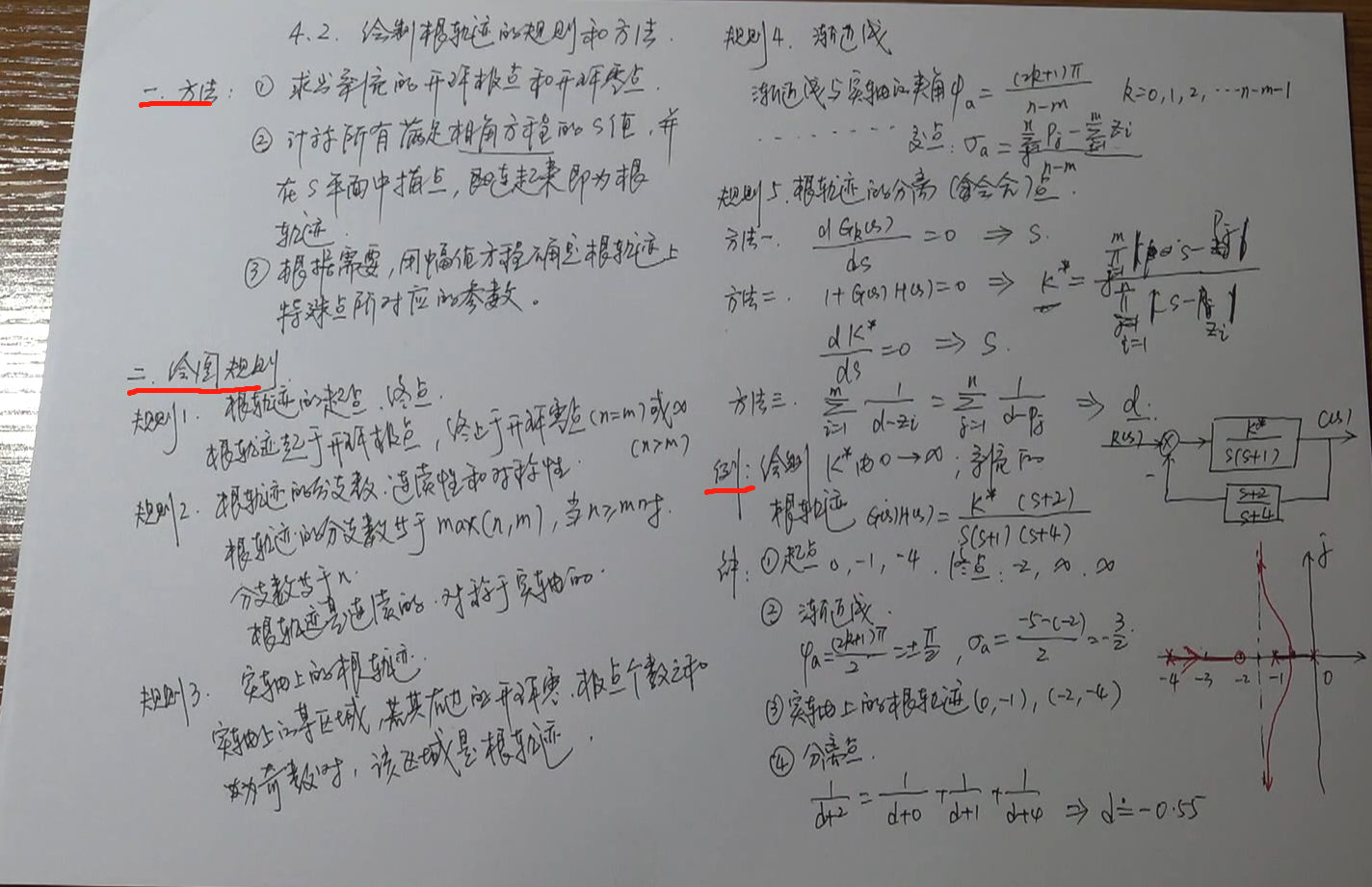
绘制根轨迹的规则
分析版
K单调递增形成根轨迹
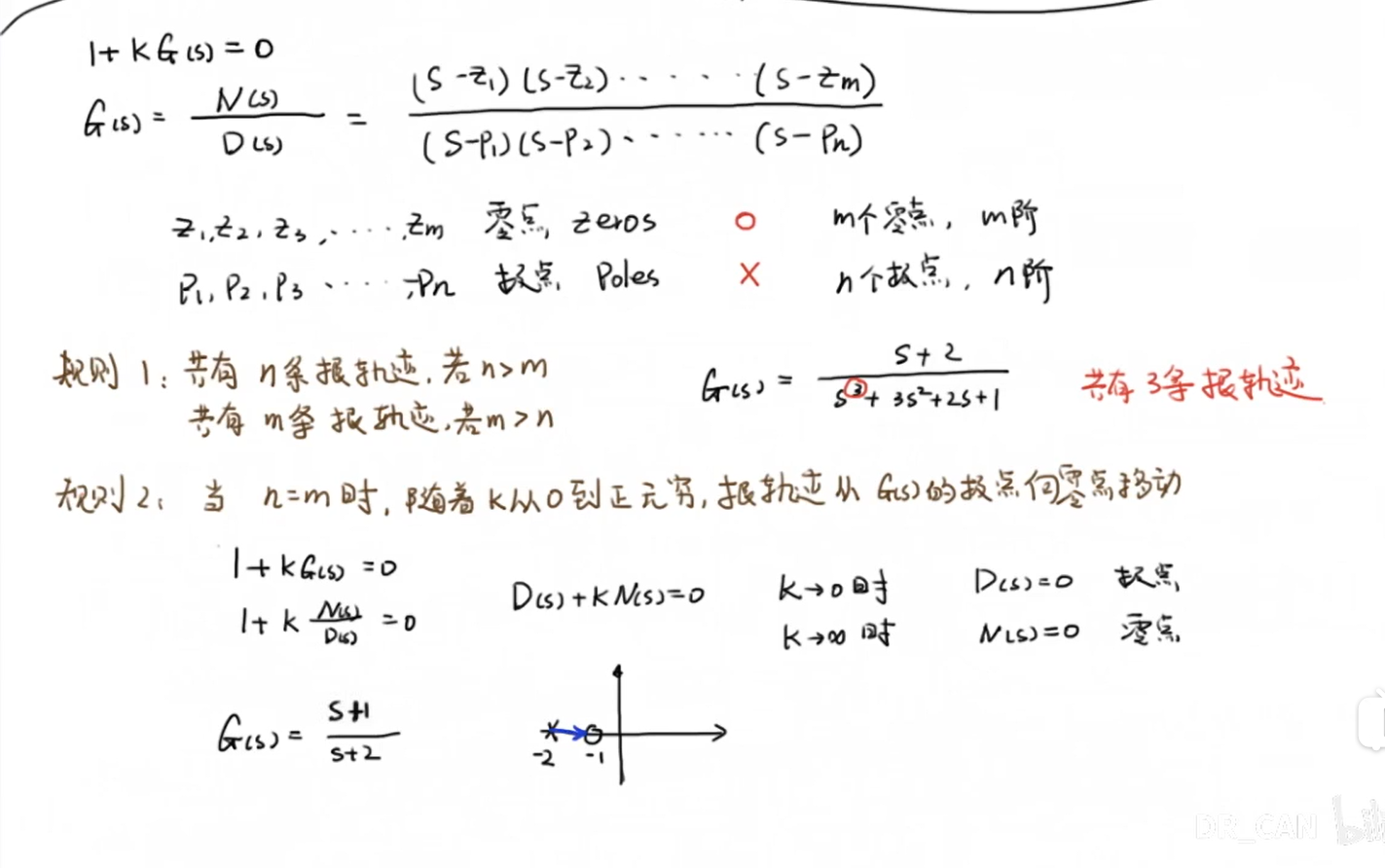
n:开环极点的个数
m:开环零点的个数
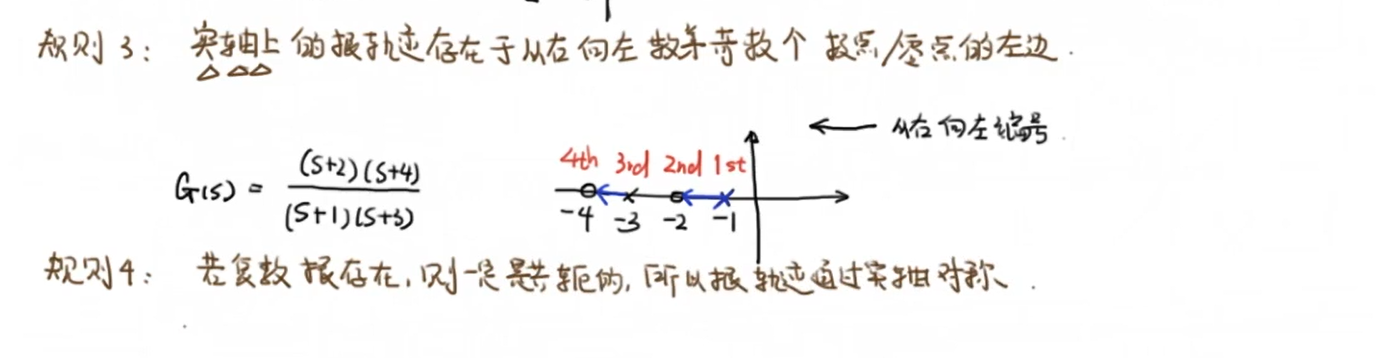
根轨迹是连续的,是关于实轴对称的
根轨迹不能重合,有相遇点必分离开
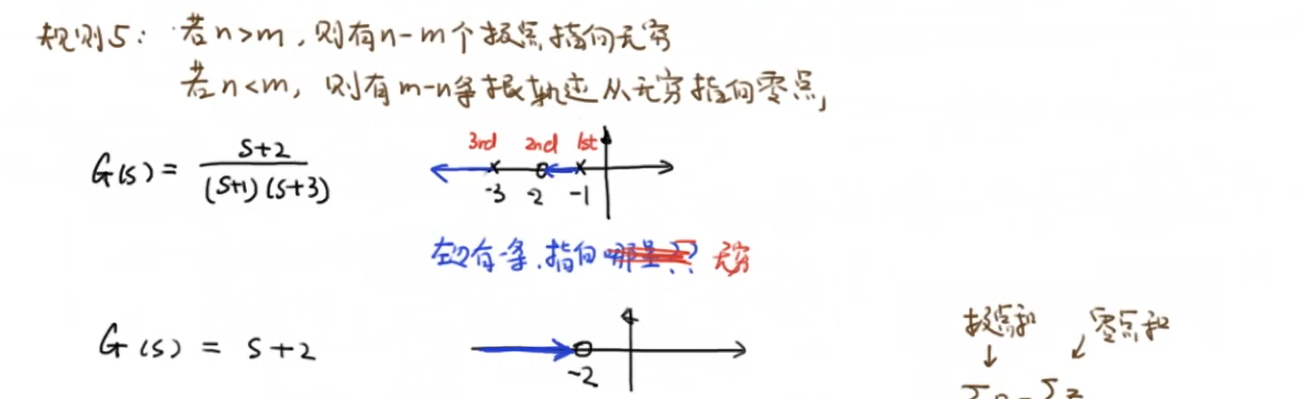
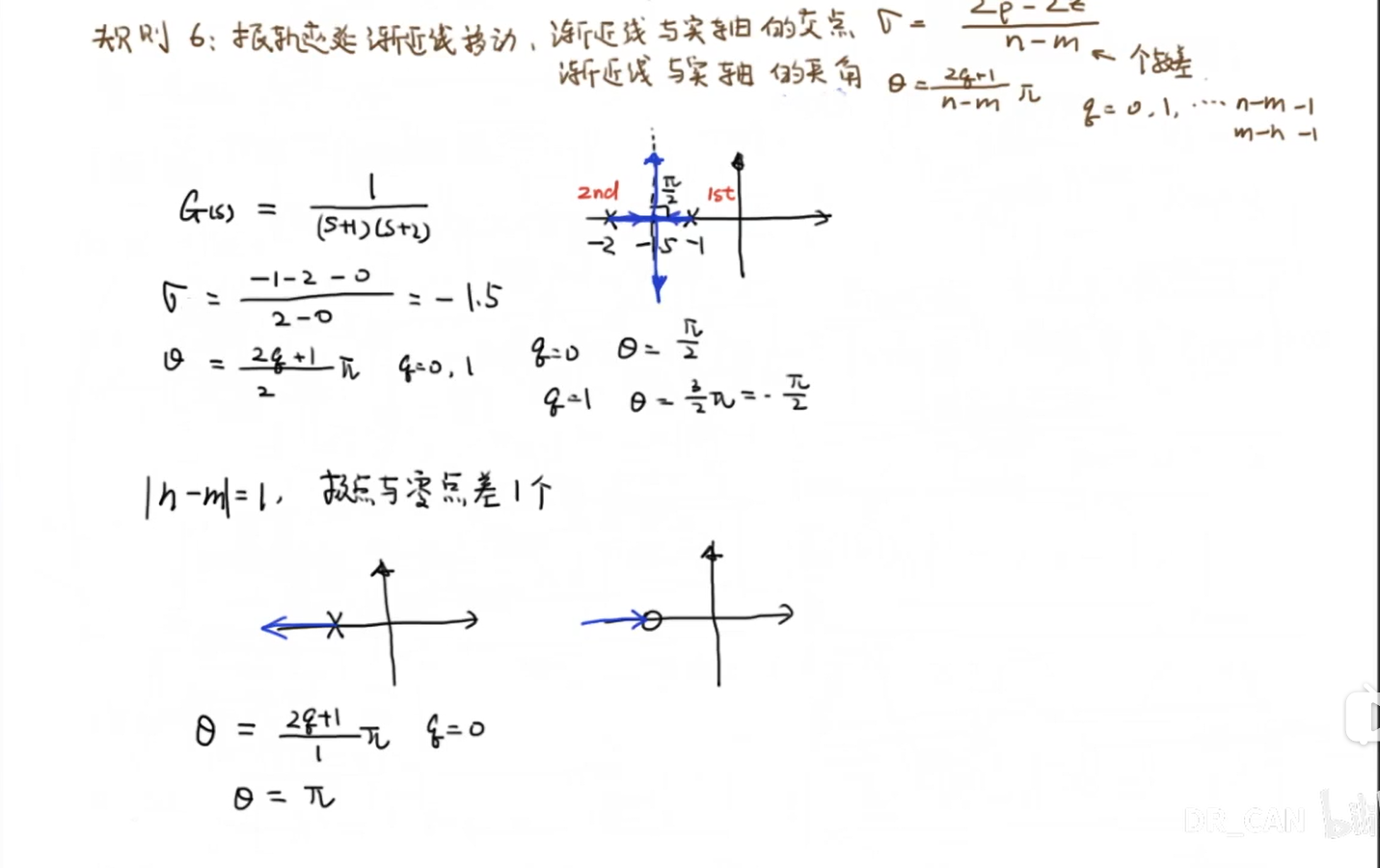
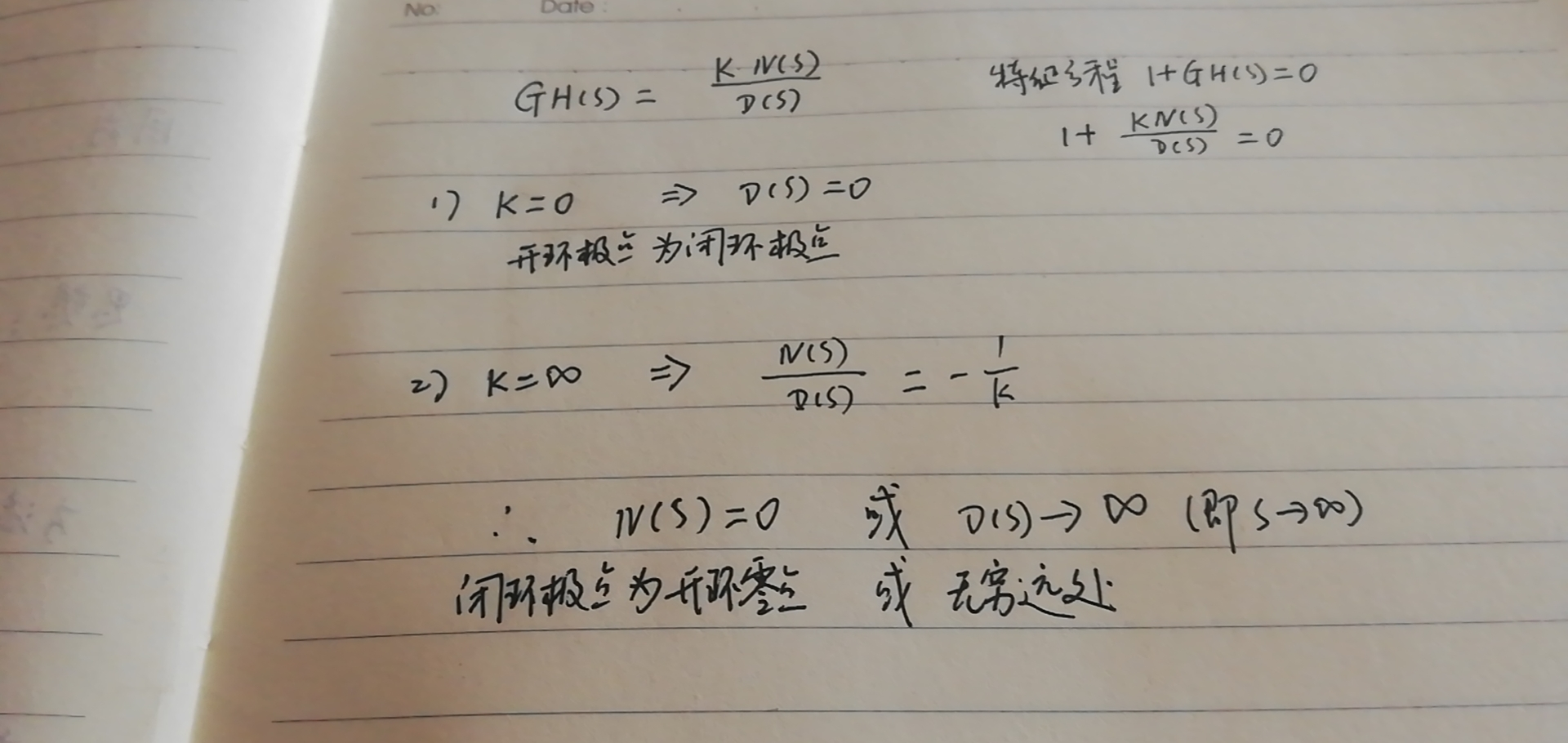
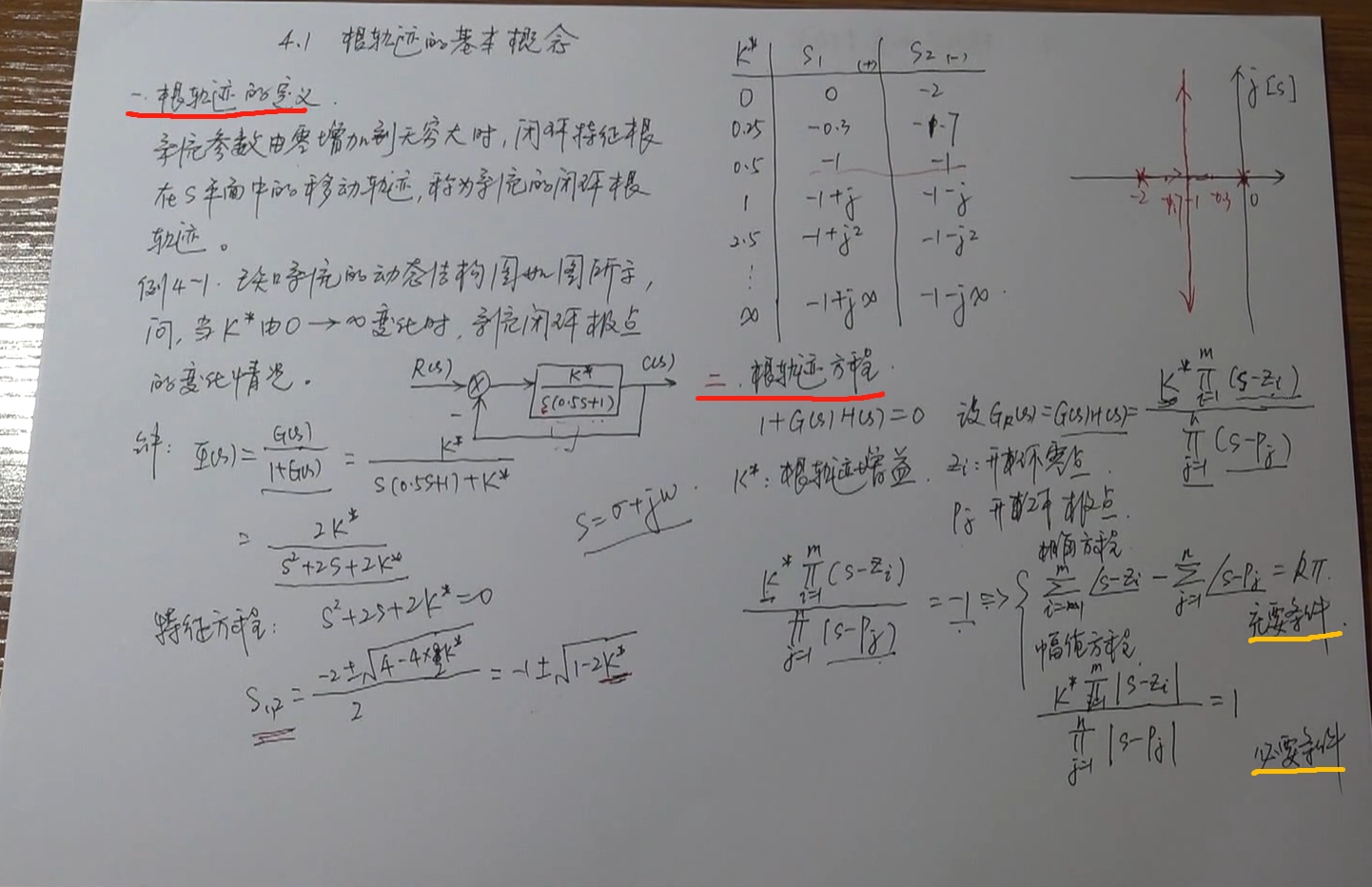
Rule1:根轨迹的起点(K=0)是开环极点,终点(K=∞)是开环零点或无穷远处;有n条根轨迹(一般是n≥m,取max(n,m));有n-m条渐近线
Rule3,Rule4:
分子只取"实部"累加,因为共轭复数根的虚部相加是互相抵消
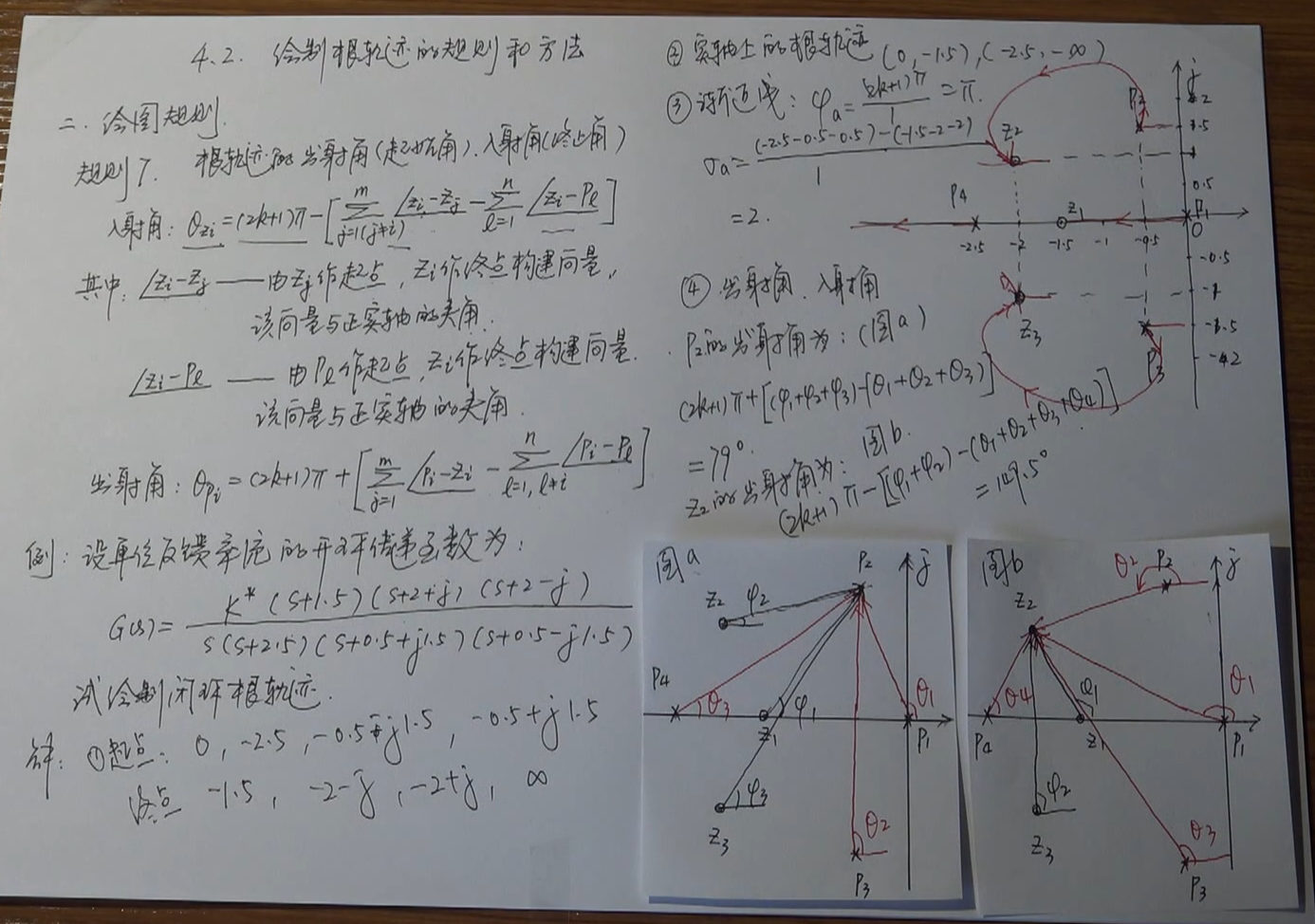
Rule5:(极点的)出射角=180-“极点”+“零点”;(零点的)入射角=180-“零点”+“极点”;“零点”“极点”指两点连线与实轴的夹角;只对复数根极点和复数根零点使用,在实轴上的极点和零点不用求
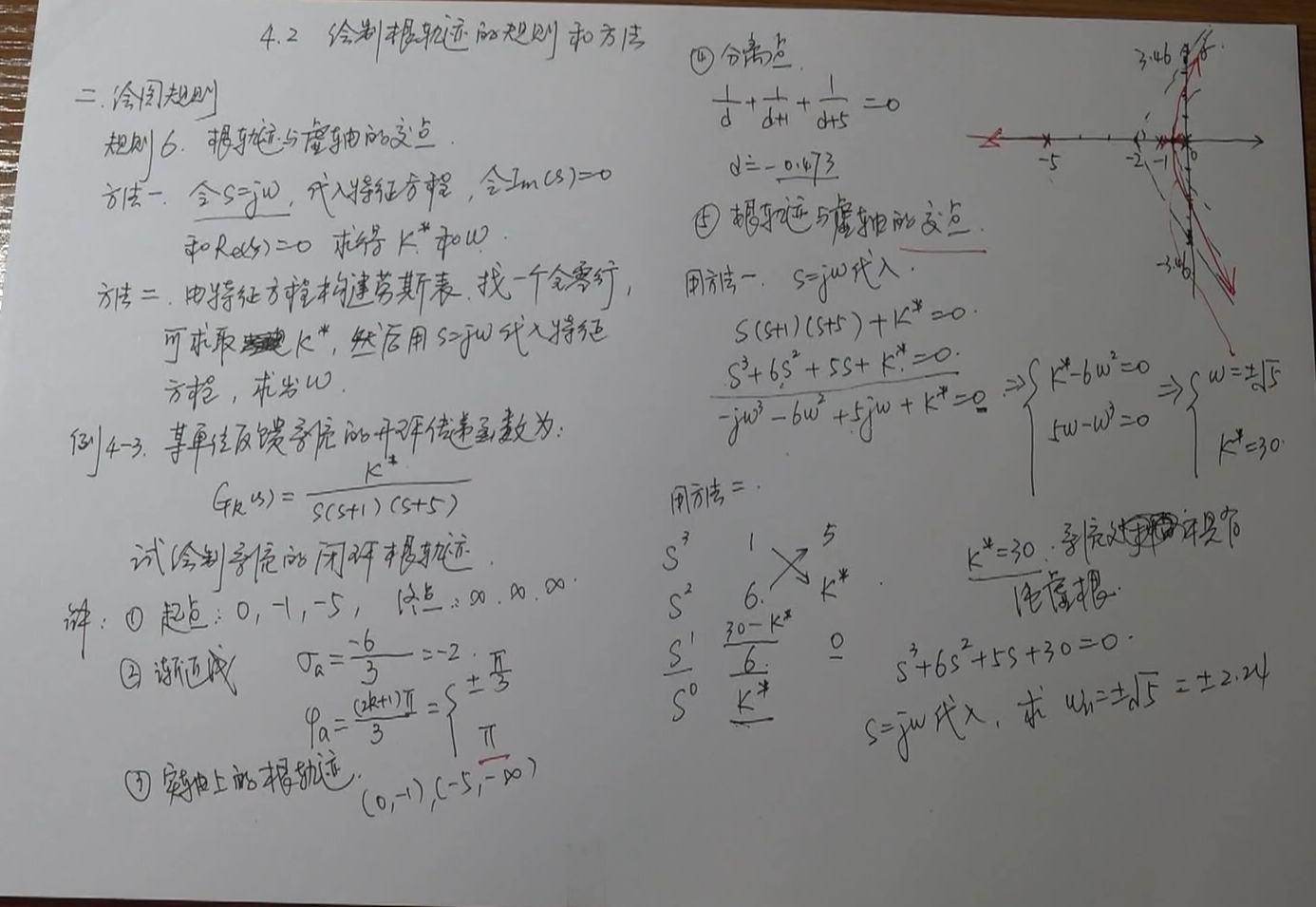
Rule6:解出根轨迹和虚轴的交点:s=jω代入1+GH=0令实部虚部为0解出ω;与虚轴交点得出的K就是临界稳定K值
Rule7:K值不一定是单调递增的,会有很多局部极值点,所以会出现汇合点和分离点 method1:采样法;method:对K求导
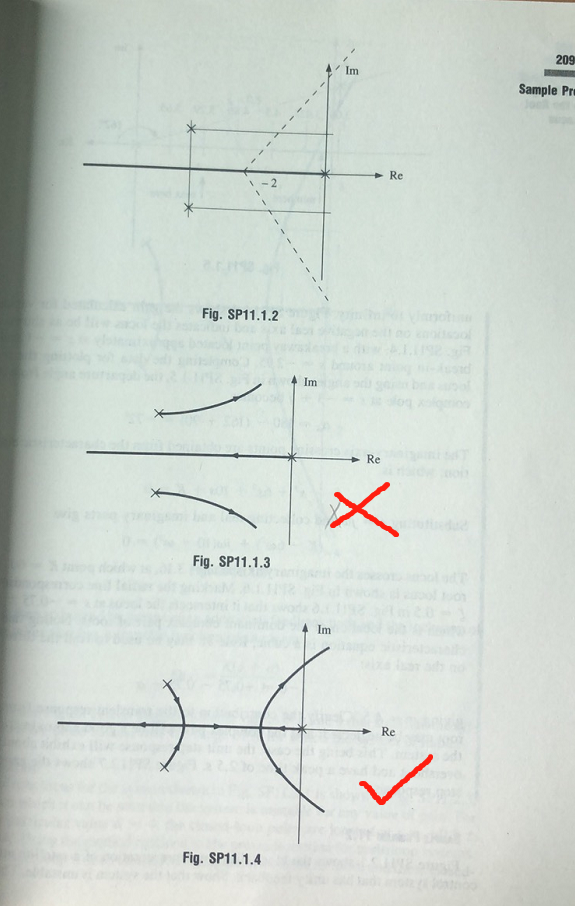
易错点!: 常见的根轨迹分离点是位于实轴上的两条根轨迹分支的分离点==两个极点之间/两个零点之间/多重极点的位置;不一定是这两种情况!! 见下图
Rule8:根轨迹的分离点与分离角;分离点在实轴上两个极点之间或者在两个零点之间或者是多重极点的位置,其夹角为360/相关极点数
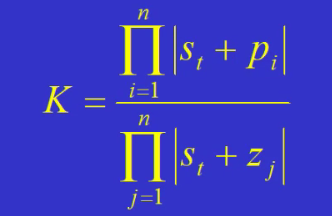
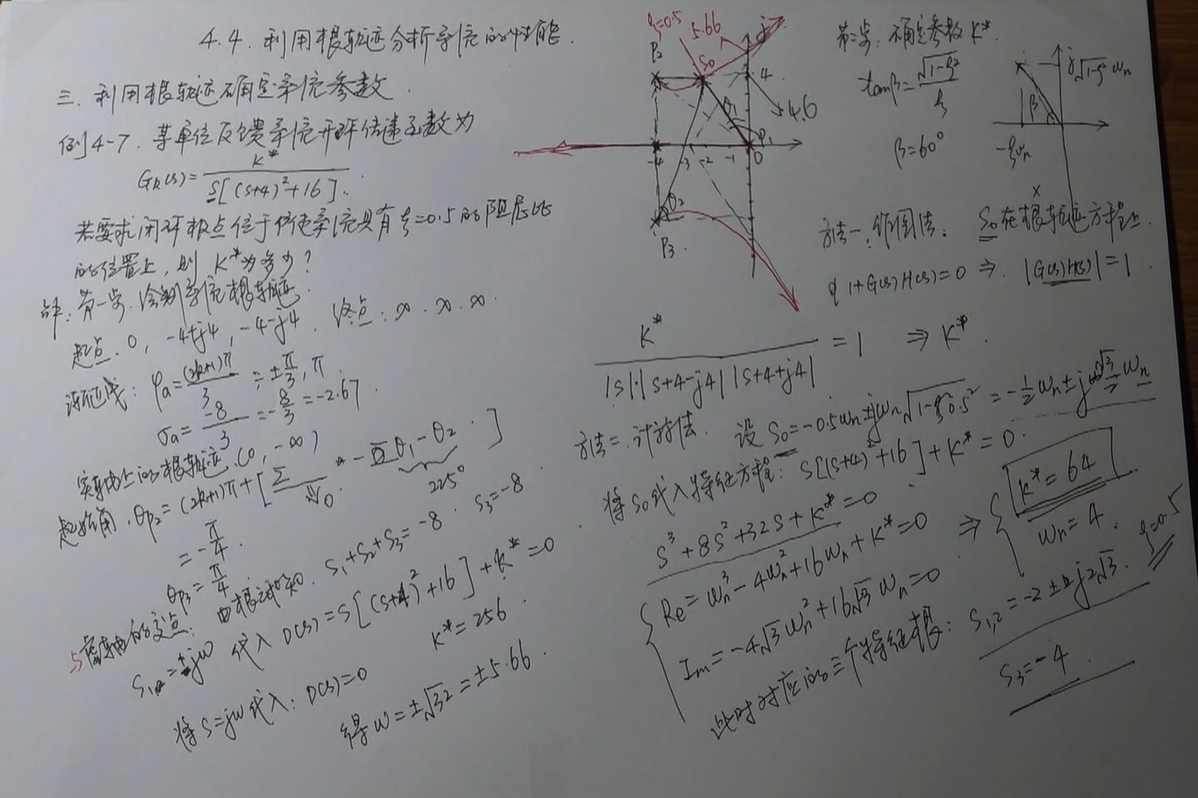
Rule9:给定闭环极点s,计算K
|GH| = 1
K = s到所有极点连线长度之积/s到所有零点连线长度之积
注:一个K值对应n个极点 (n是开环极点的个数/根轨迹的条数/闭环极点的个数);因为1+GH=0给定一个K,由于s最高次数为n,所以有n个解
proof:
做题版:
写出开环传递函数G(s)H(s)
Rule1: 起点是开环极点,终点是开环零点或无穷远;有n条根轨迹;有n-m条渐近线
Rule2: 确定实轴上的根轨迹
若有渐近线: Rule3,Rule4:确定渐近线与实轴的夹角和交点(技:关于实轴对称,只求一边)若没有渐近线考试写:rule3 rule4:无
分子只取"实部"累加
若有复数根: Rule5:仅对复数根使用:(极点的)出射角=180-极点+零点;(零点的)入射角=180-零点+极点(技:关于实轴对称,只求一边)
若根轨迹与虚轴有交点: Rule6:解出根轨迹和虚轴的交点:s=jω代入1+GH=0令实部虚部为0解出ω
☆求分离点: Rule7 Rule8:根轨迹的分离点与分离角:
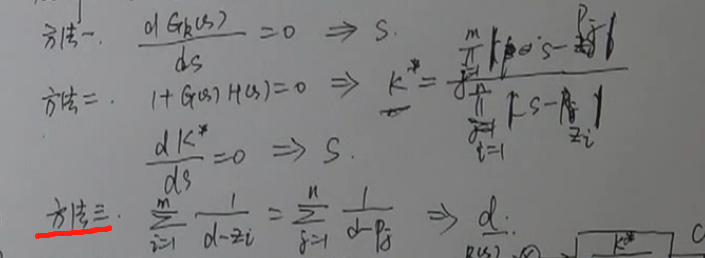
分离点:
与实轴夹角的分离角:,
表示离开(会合)实轴那个点的重合点个数(或者结合对称性,l个射线之间的夹角为360/l)
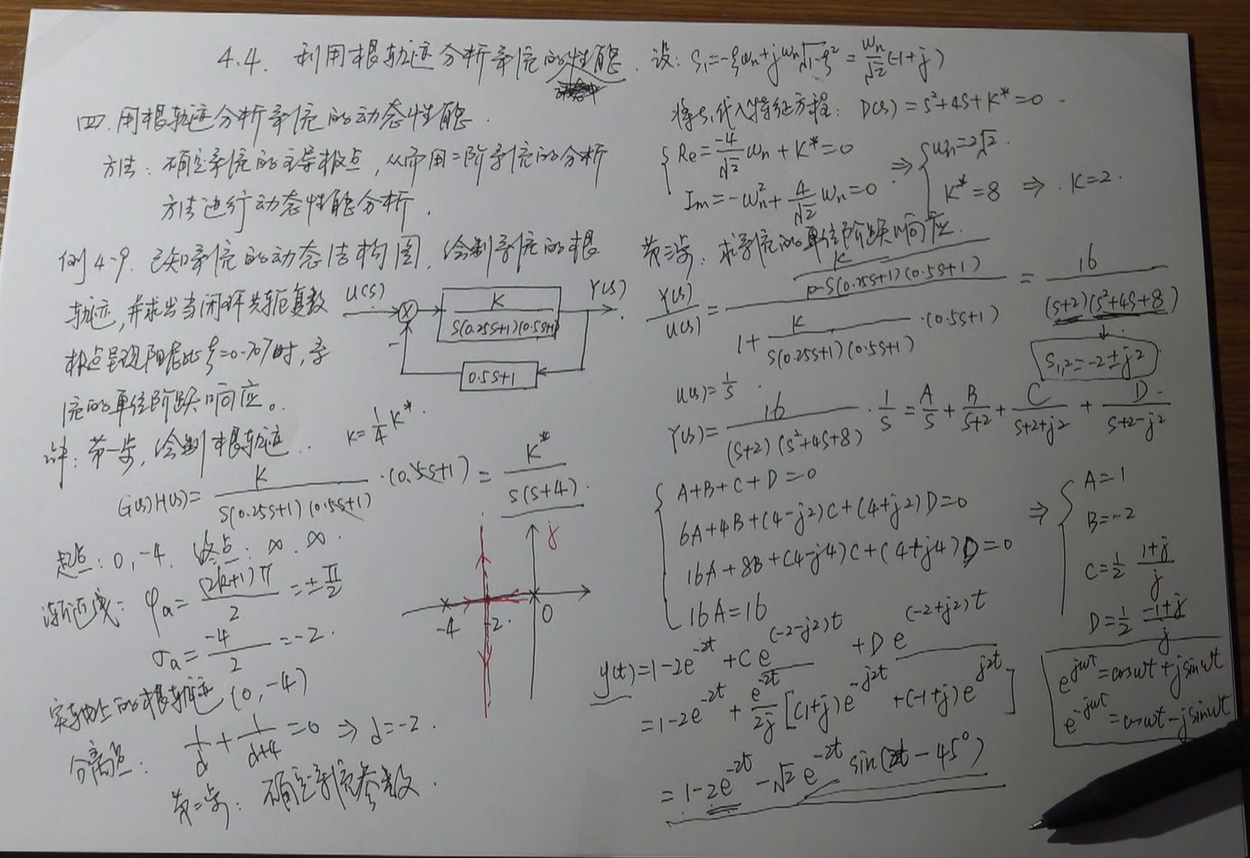
Rule9:给定闭环极点s,计算K
K = s到所有极点连线长度之积/s到所有零点连线长度之积
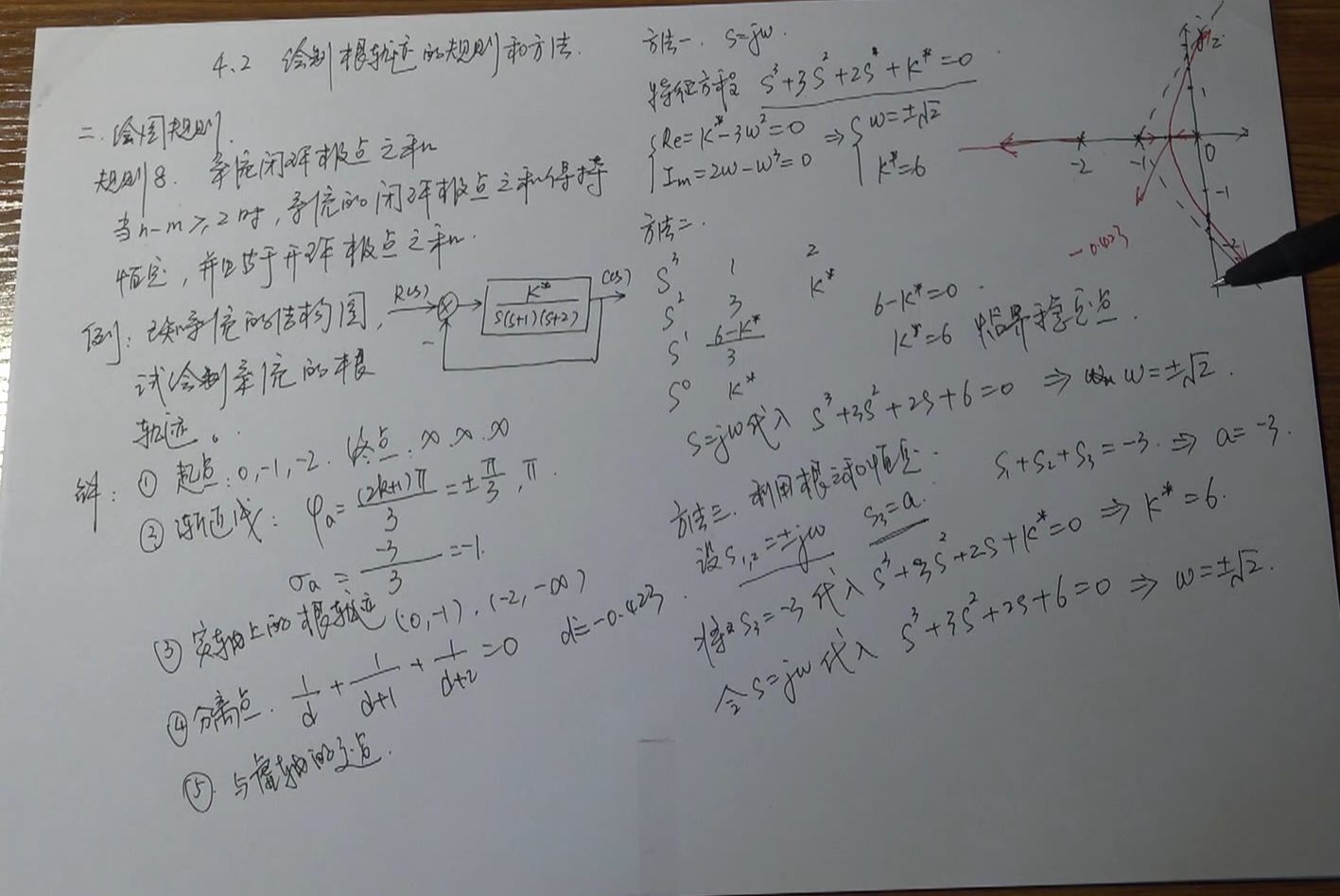
Rule10:n-m≥2,则闭环极点实部之和=开环极点实部之和
王老师讲义
用根轨迹分析系统性能
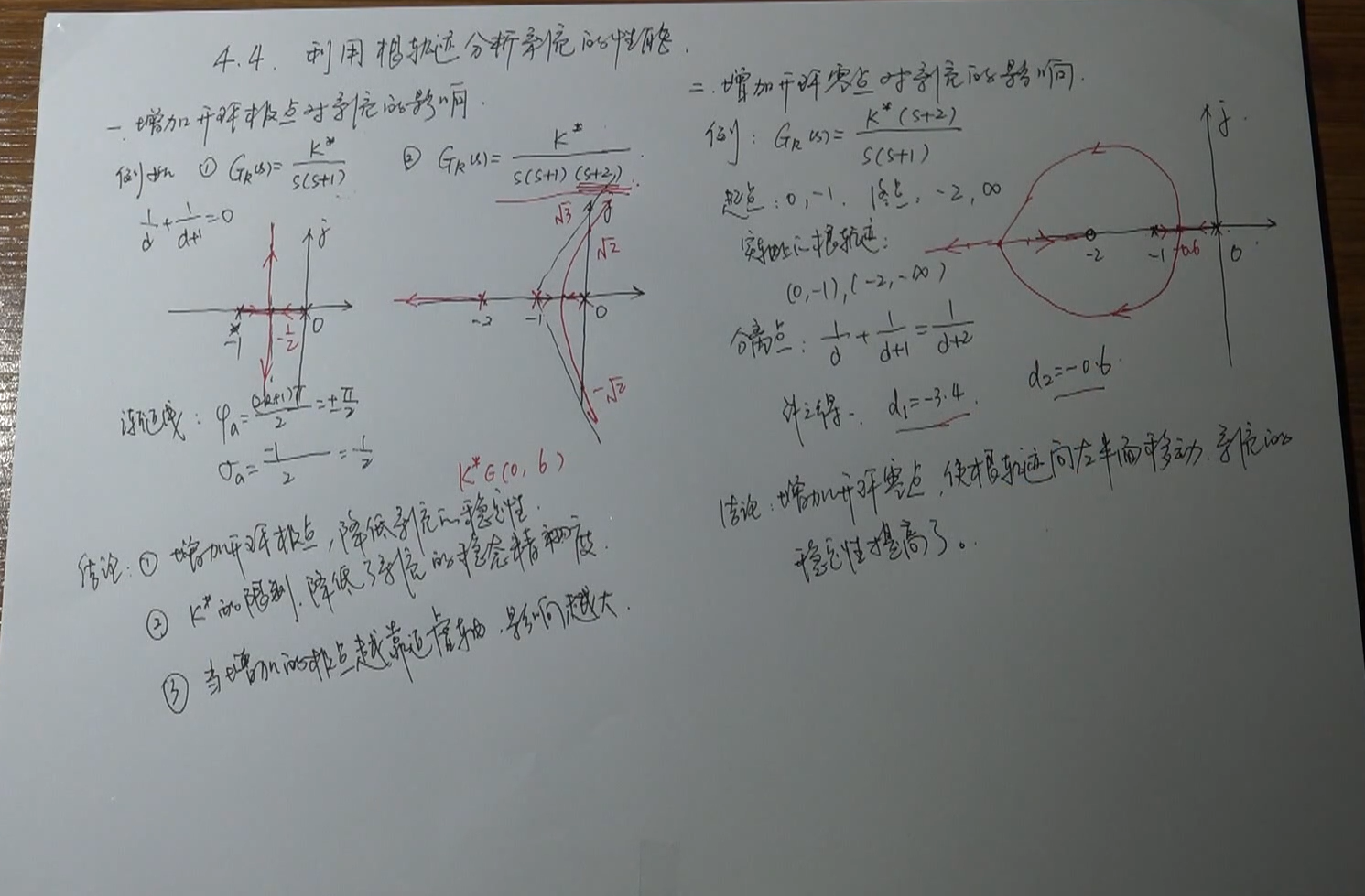
↑:②中增加开环极点后,若要系统稳定,则K*须有限制,从原先的∞限制到(0,6)
DR